ROS
강사님 Lidar 정보
https://github.com/katebrighteyes/IITP1st/tree/main/Lidar
node 실행하는 방법 : rosrun (패키지이름) (노드이름)
통신을 노드 이름으로 찾음(인터넷이 도메인을 사용하듯 roscore가 중계인 역활을 함)
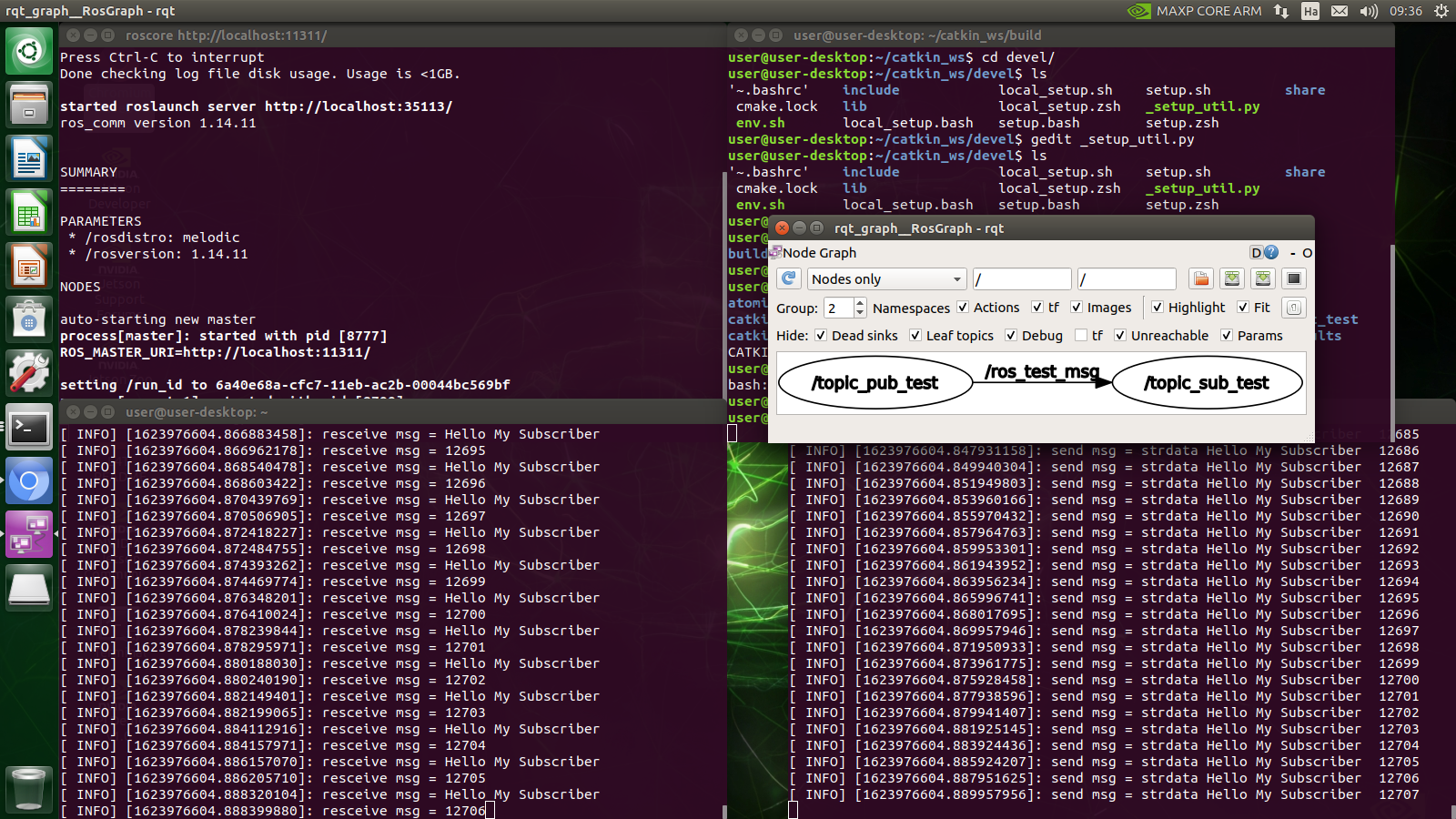
rqt_graph : node와 topic의 상관관계를 알려줌(디버깅 할 때 사용하면 좋음)
LiDar
LiDar and camera
2d LiDar : Camsensor, lds01
모든 2d 라이더가 사용법이 비슷 git clone 다름
rviz : ridar나 camera를 정보를 보여줌
Camera
노드 간에 관계성을 생각해야됨
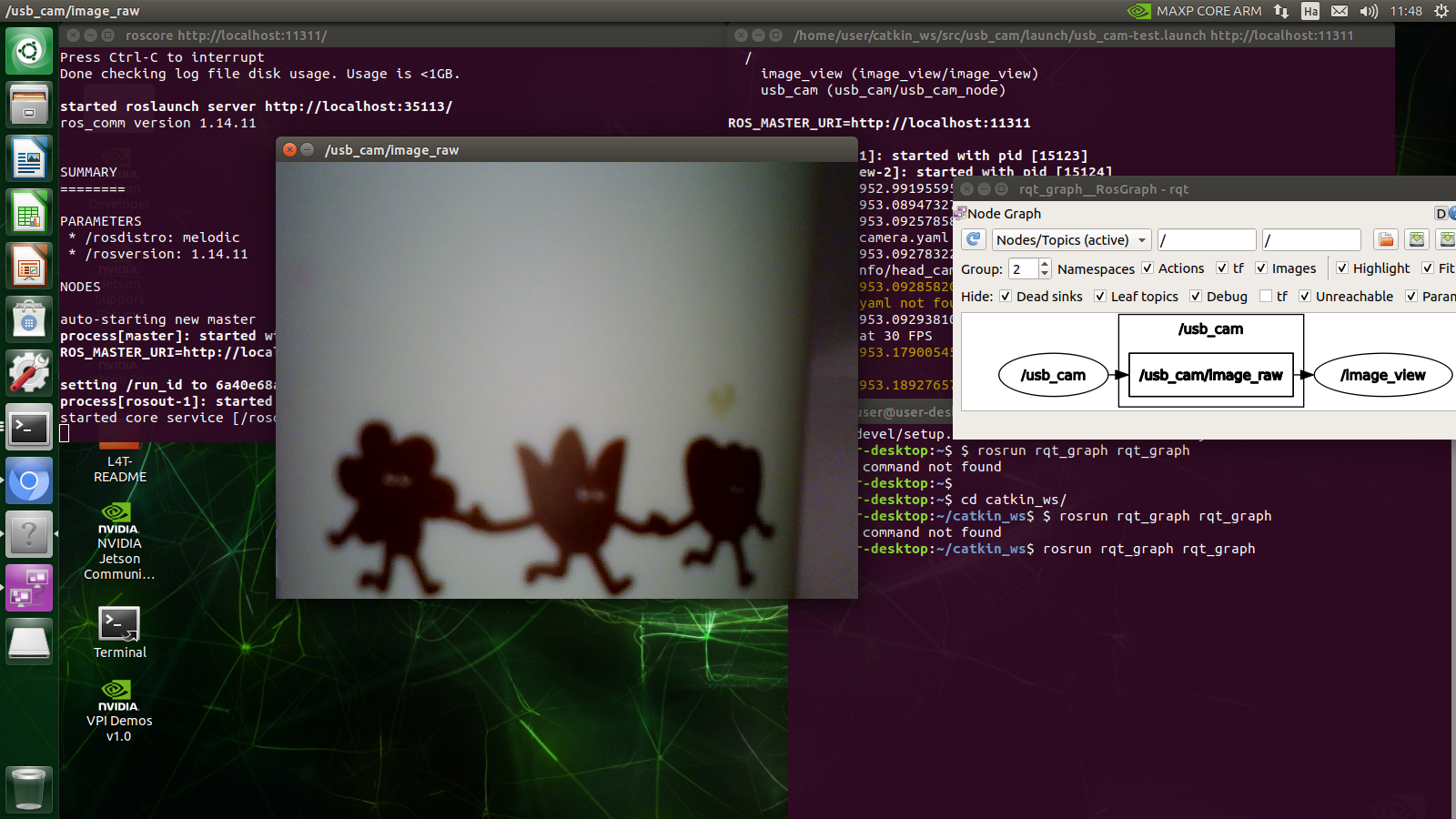
카메라 설정
https://github.com/katebrighteyes/jetson_ros_melodic/tree/master/starter
ls /dev/video* 로 장치 확인 필수...
카메라 키고 rviz치면 화면이 뜸
왼쪽 콘솔 창에 Add 누르고 usbcam의 Image클리하면 됨
OpenCV Package
cd ~/catkin_ws/src
catkin_create_pkg ros_opencv_test std_msgs roscpp rospy
catkin_make
#!/usr/bin/env python : 이거 있어야 실행됨
import rospy, rosrpkg 있어야 됨
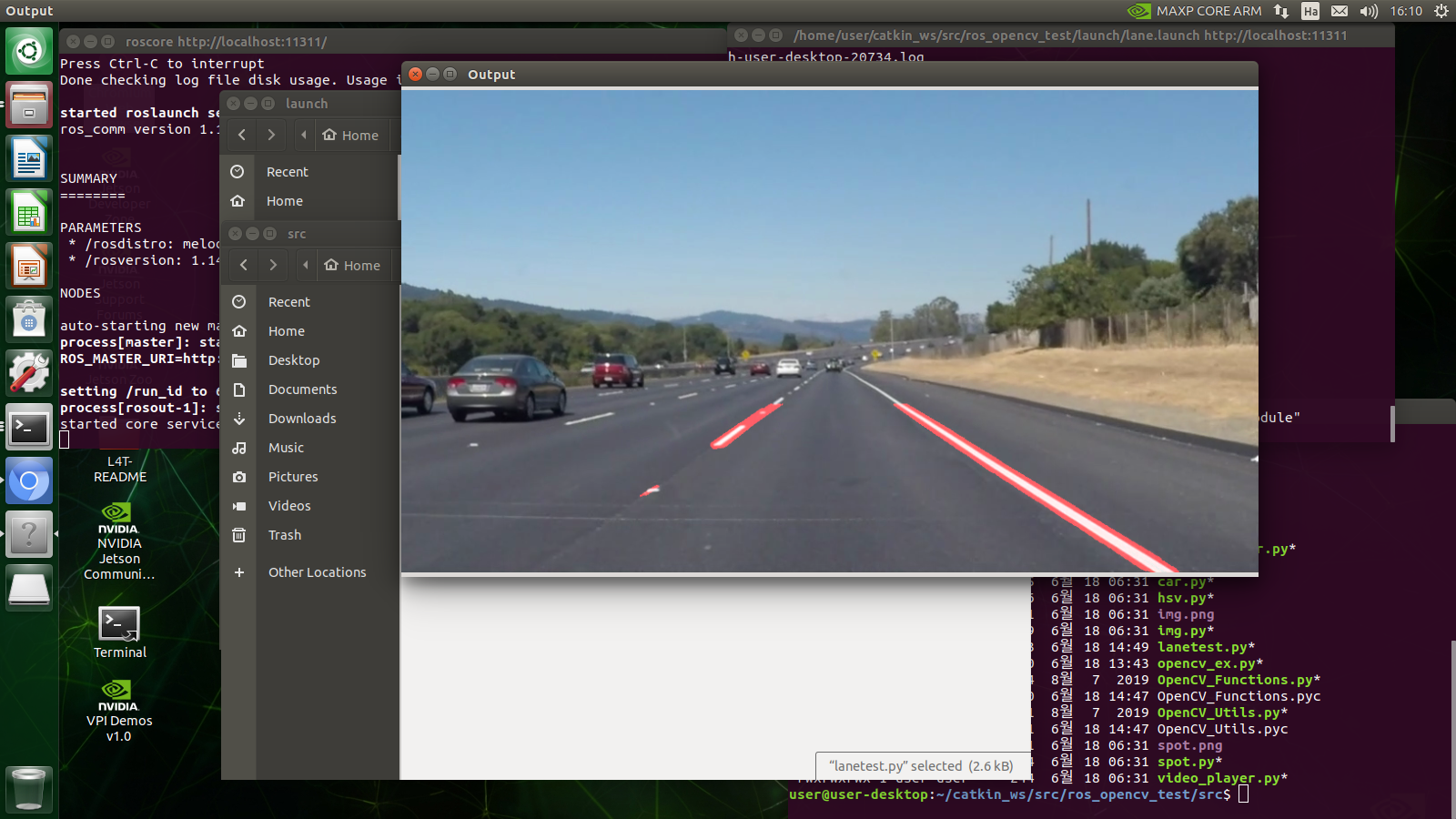
ros안에 차선 인지 패키지를 만듦
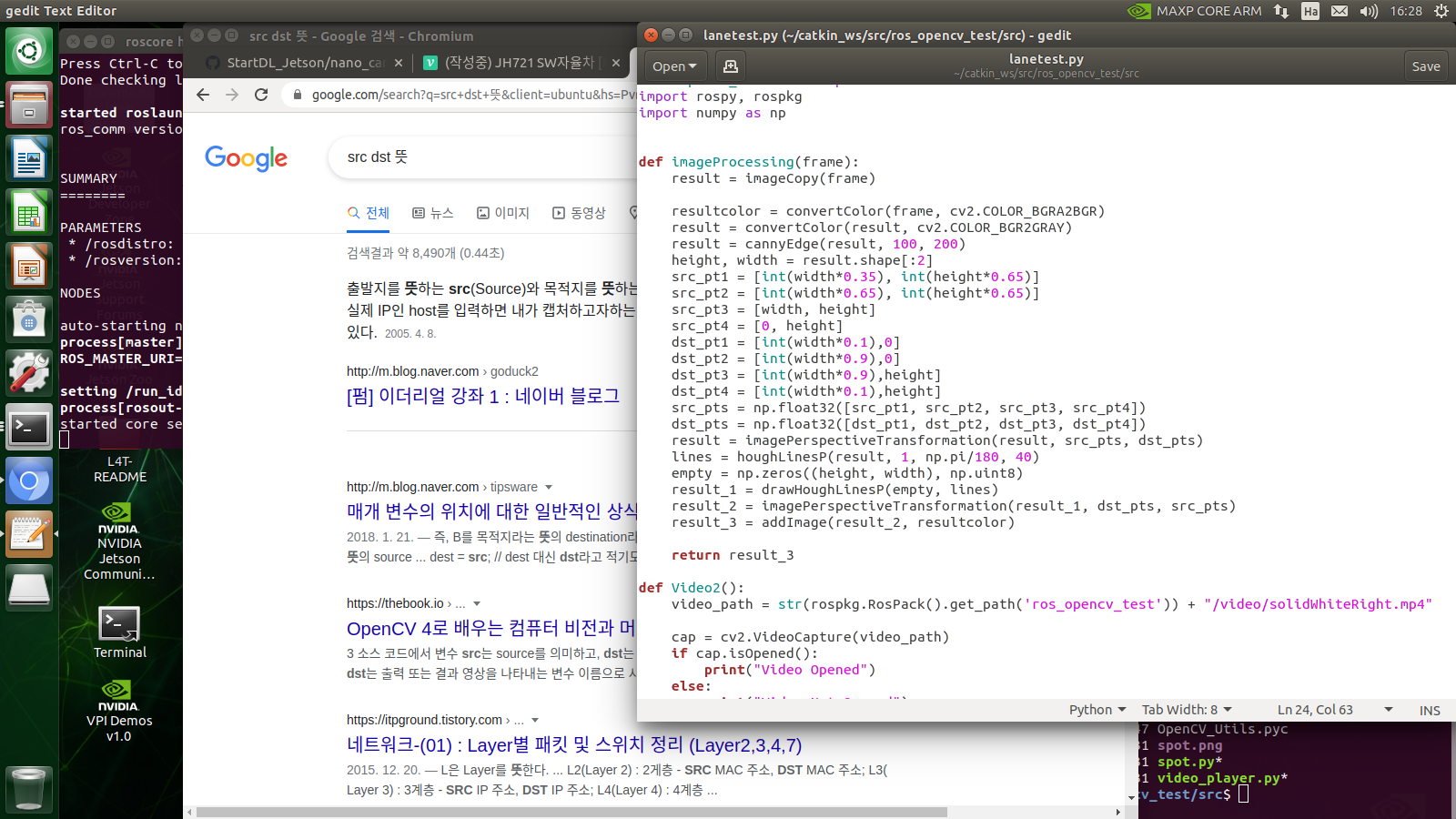
차선 인식 코드
turtle bot
https://github.com/katebrighteyes/jetson_ros_melodic/blob/master/next/turtlebot3_sim.txt
SLAM & Navigation
simultaneous Localization And Mapping & Navigation
https://github.com/katebrighteyes/ros-seminar/blob/master/11_SLAM%EA%B3%BC_%EB%82%B4%EB%B9%84%EA%B2%8C%EC%9D%B4%EC%85%98.pdf
TIP
YDLiDar -> 저가로 괜찬/ 집에서 해보는용
IPLiDar -> 비싼듯..
