slam
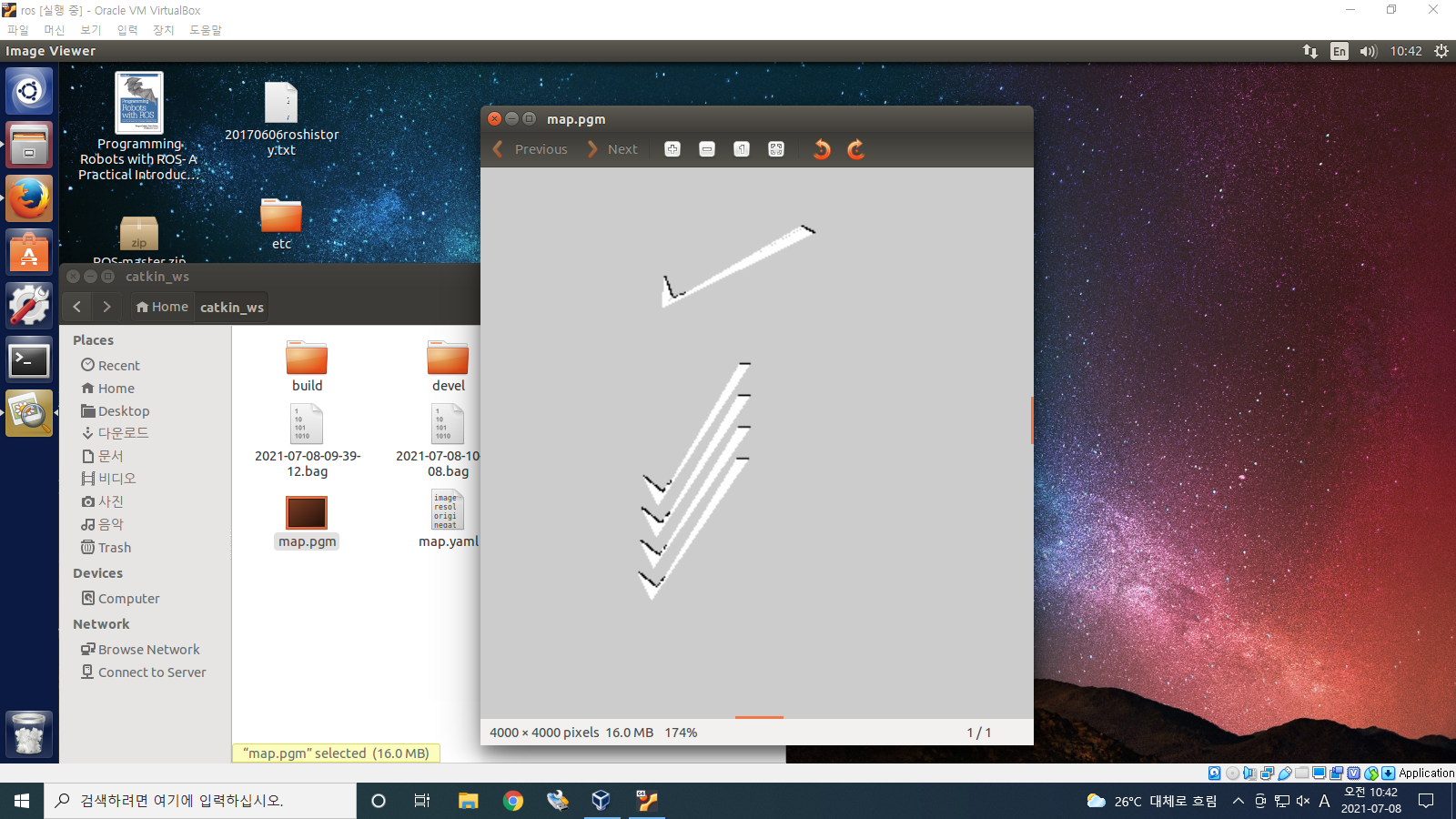
(가상머신안에서 돌렸기 때문에 맵자체가 좋게 나오지는 않았음)
기계를 움직일 때(돌릴 때) 천천히 하는 것이 중요
rocore
rosbag record -o {map_name} /scan /tf
(기계 돌아다니면서 스캔정보저장 -> Ctrl + c)
(맵 저장 준비?)
rosparam set use_sim_time true
rosrun gmapping slam_gmapping
rosbag play --clock {map_name}.bag
rosrun map_server map_saver
- 맵 bag 정보
- rosbag record /scan /tf -> YYYY-MM-DD-HH-mm-ss.bag 파일로 저장됨
- rosbag record -o {map_name} /scan /tf -> {map_name}_YYYY-MM-DD-HH-mm-ss.bag 파일로 저장됨
- rosbag record -O {map_name}.bag /scan /tf -> {map_name}.bag 파일로 저장됨
- 맵 저장 준비
rosparam set use_sim_time true
rosrun gmapping slam_gmapping - 맵 저장 스타트
rosbag play --clock {map_name}.bag - 맵 저장
rosrun map_server map_saver
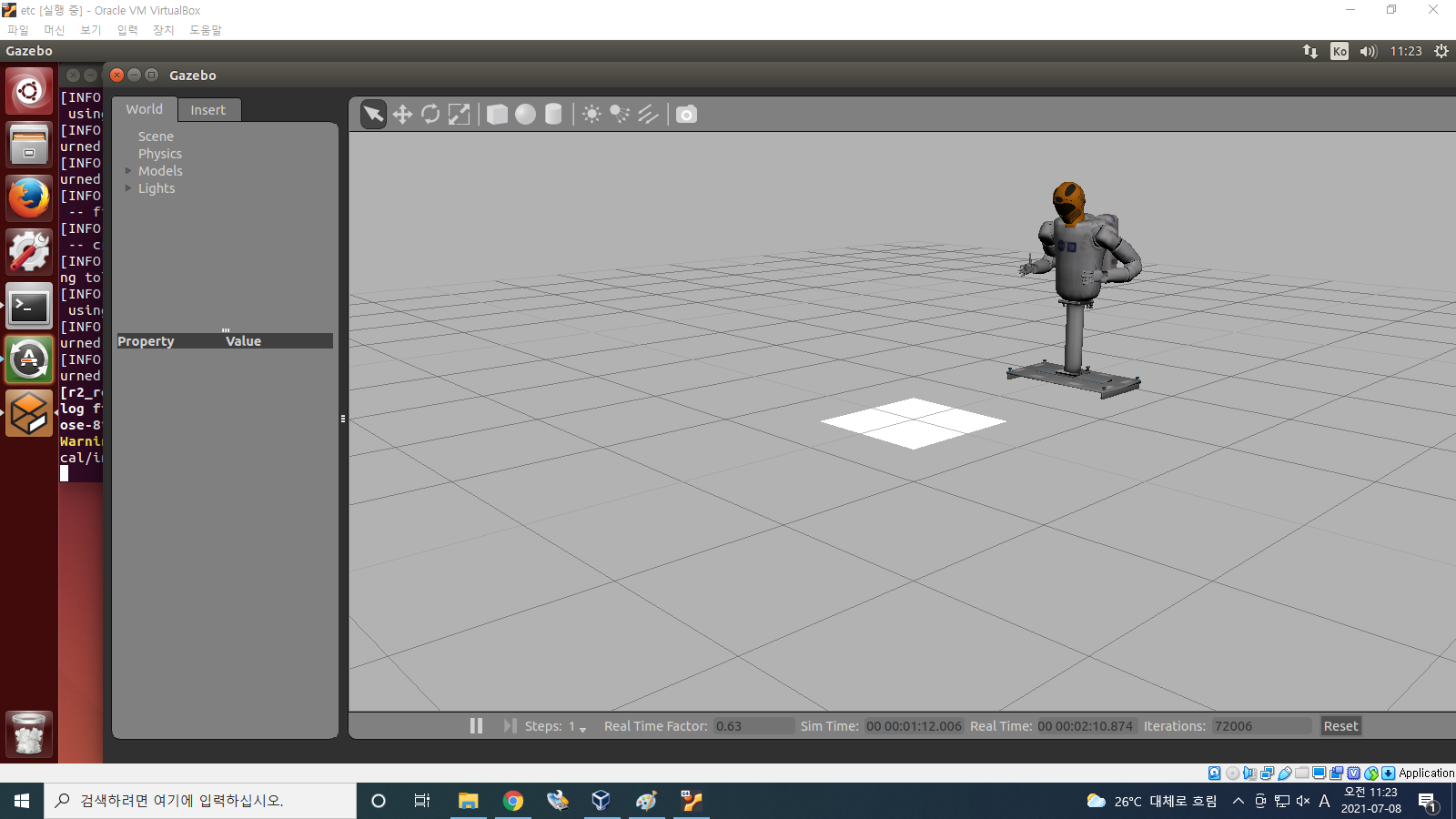
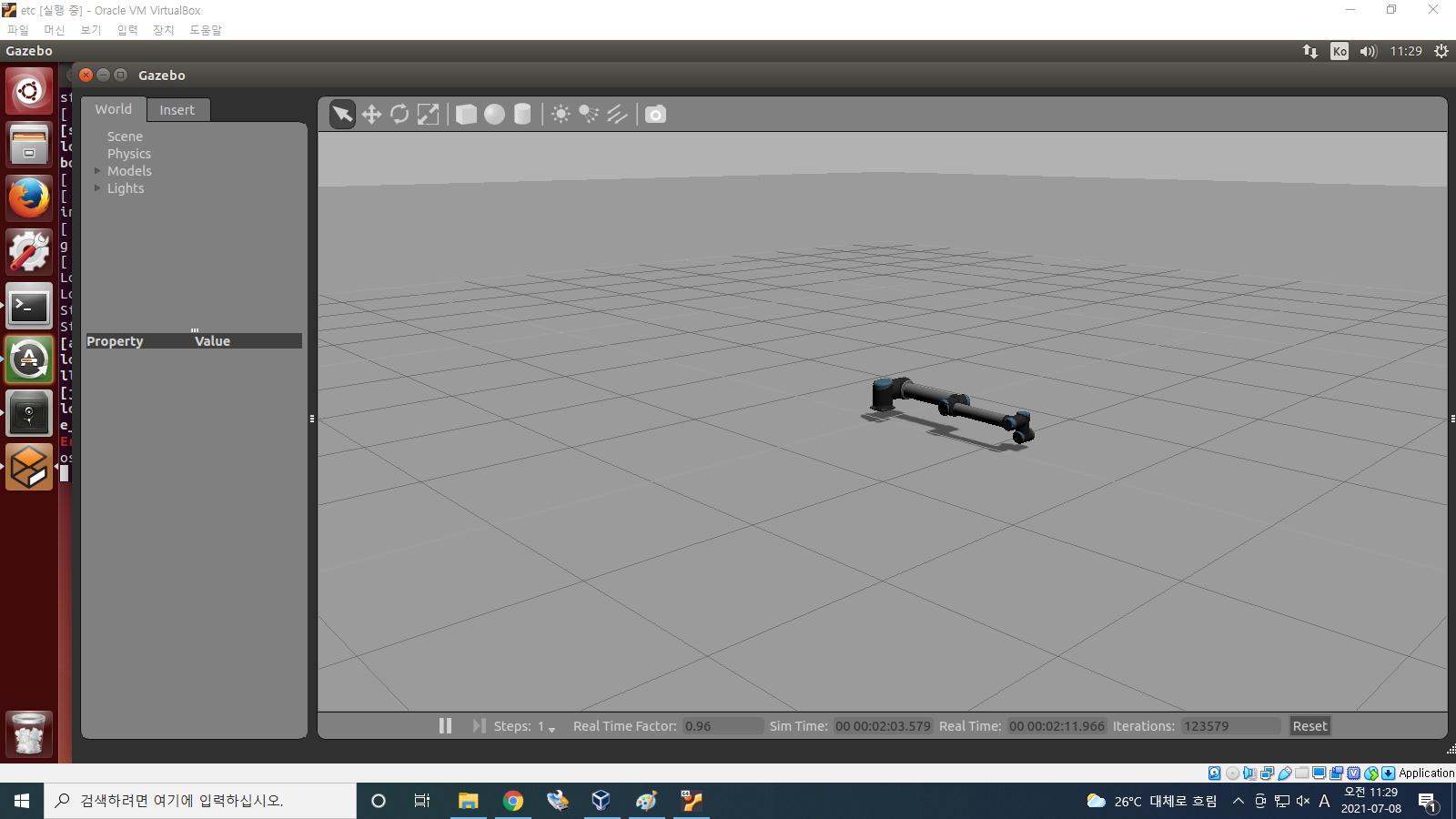
다른 로봇들
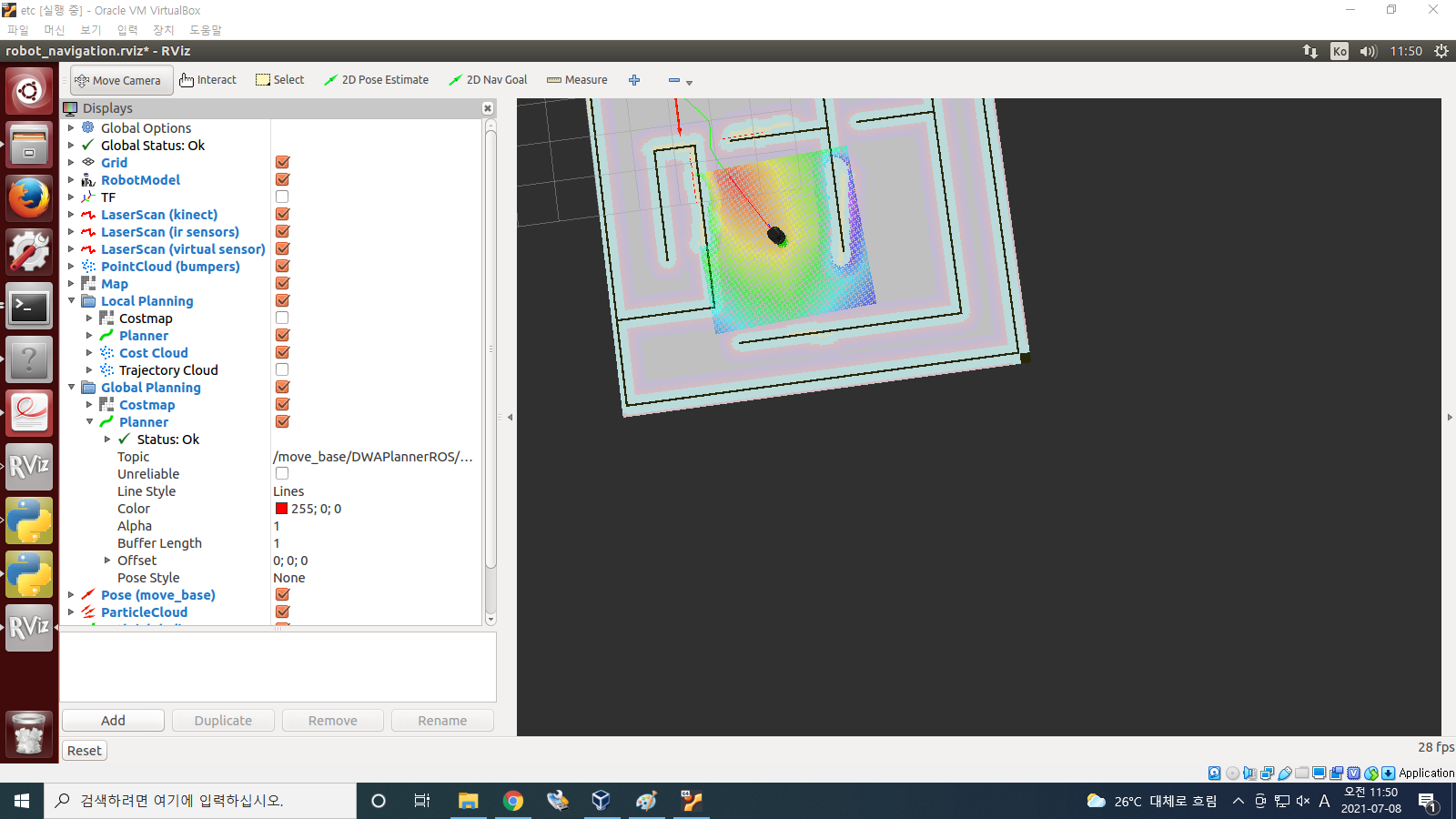
로봇주행
적응형 몬테카를로 위치 추정(Adaptive Monte Carlo Localization)
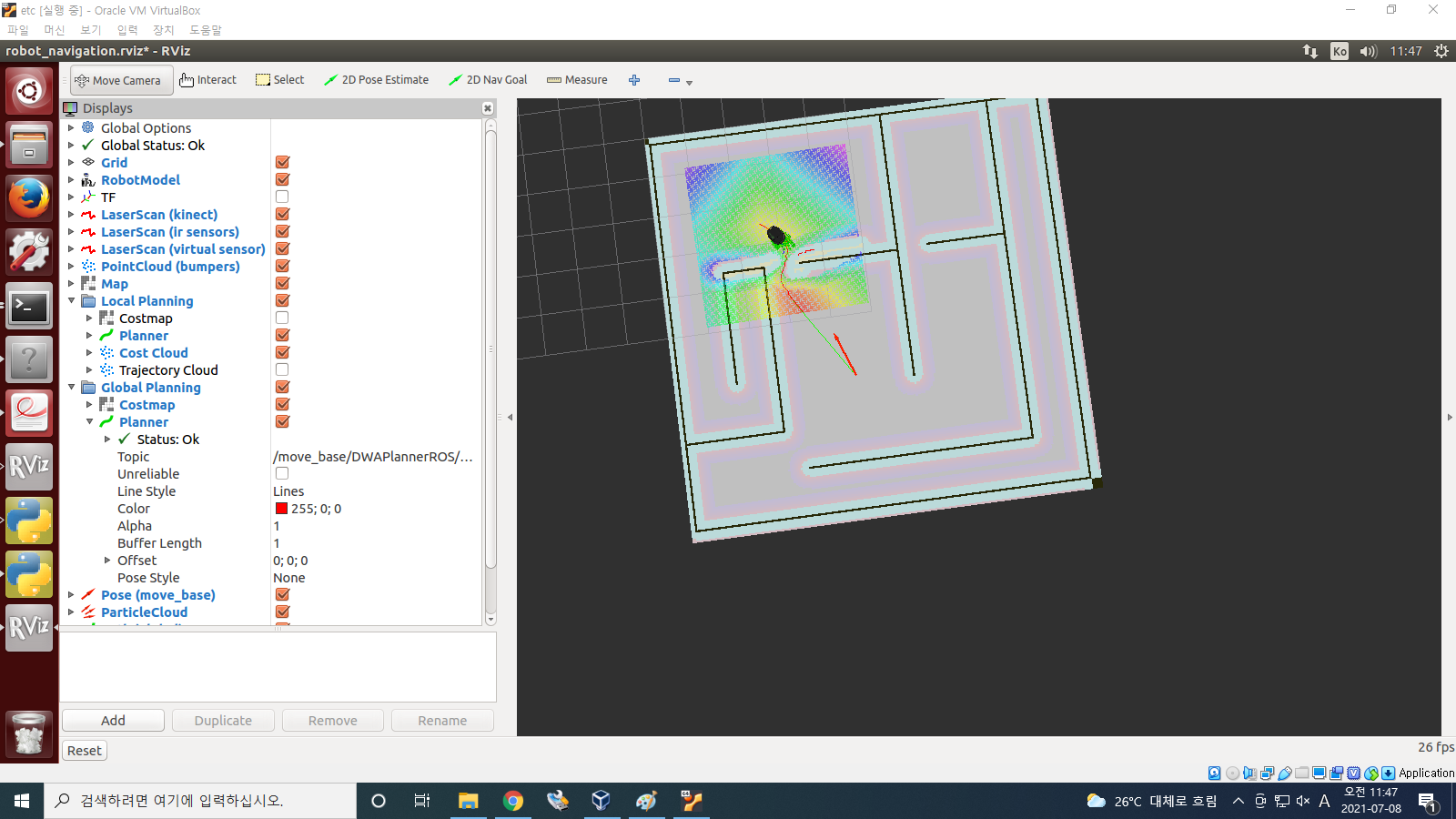
예제 파일 기준
roslaunch turtlebot_stage turtlebot_in_stage.launch
rosrun navigation patral.py
waypoints -> [(위치(3개)),(바라보는 방향(4개))]

JH.velog