
Week 3 : 선형대수 review-3
Identity Operator
- 아무것도 하지 않는 오퍼레이터
- 즉, 아이덴티티 오퍼레이터는 i, j 번째 성분을 구할 때 는 와 같다는 것을 의미하며, 이를 정리하면 결국 가 나오게 된다.
Projection Operator
- = = 와 같이, 주어진 벡터 v에 대해 내적을 수행한 후 그것의 길이를 계산하고 원래의 유니팩트를 곱하여 성분을 뽑아내는 과정을 projection 이라고 함.
- 이때 Projection Operator 로 정의할 수 있다.
- 위 식과 같이 모든 항들이 라는 공통 요소를 가지고 있어 이를 묶을 수 있으며, 따라서 n=2차원 벡터일때 + 형태로 나타난다.
- 결국 이러한 과정은 아이덴티티 오퍼레이터와 동일한 역할을 한다.
- 모든 basis 벡터에 대한 Projection operator들의 합은 Identity operator와 같으며, 이를 Completness relation 이라고 한다.
Outer product
- 외적 예시 :
- 오퍼레이터는 캣 브라 형태로 구성되며, 이는 아우터 두 개의 캣과 브라를 조합하여 만들어진다.
- 주어진 basis에 따라 여러 벡터를 활용해 오퍼레이터를 만들 수 있다.
행렬과 Operator의 관계
- 와 같이,
- Completness relation을 사용하여 k=1부터 n까지 설명하고, 이를 기반으로 J 형태의 람다를 도출할 수 있다.
- 이때 구조는 가 되어, 원소들이 1부터 n까지 더해지며 나타난다.
- 결과적으로 두 개의 매트릭스의 곱은 행렬 곱과 동일하게 처리할 수 있어, 오퍼레이터를 매트릭스처럼 다룰 수 있다는 결론을 얻을 수 있다.
Adjoint of an operator
- 일반적으로 선형대수는 실수 필드를 다루지만, 양자컴퓨터 분야에서는 필드가 복소수로 가정된다는 점이 다르다.
- Operator의 Adjoint를 구하는 방법은 Review-2 자료 참고!
- 우선 주어진 행렬의 행과 열을 바꾸는 Transpose 연산 이후, complex conjugation까지 수행하면 adjoint를 구할 수 있다.
- 에 operator를 적용시킨 결과 -> 로 나타낼 수 있다. 이것의 adjoint는 이다.
- 반대로 의 bra 벡터 를 먼저 구하고, -> 로 만들어주는 operator를 라고 하면, 이는 의 adjoint operator라고 할 수 있다.
- 즉,
Dual Space
- 듀얼 스페이스 개념은 캣 벡터와 브라 벡터의 관계로 설명되며, 한 쪽 공간의 변화를 다른 공간에 대응시키는 것이다.
- 즉, 한 공간에서의 조합이 다른 공간에서도 동일한 관계로 유지된다는 것을 의미
- (예시) ket 형태의 basis 벡터 로 선형 조합되는 ket 벡터가 있을 때
로 나타난다고 가정.- bra 벡터를 구하기 위해서, 의 adjoint 관계를 찾아서 대응시키는 방법이 있음.
- 또다른 방법으로, bra 벡터를 구하기 위해 각각의 에 대해 adjoint 관계를 구해서 로 대응시킨 후 의 선형 조합으로 를 구할 수 있다!
Hermitian Operators
- Hermitian operator의 정의 : 어떤 operator 에서, adjoint operator = 일때 operator 를 Hermitian operator라고 한다.
- anti-Hermitian : if = 일 경우
- 임의의 operator 는 Hermitian part와 anti-Hermitian part로 아래와 같이 나눌 수 있다.
- =
Unitary Operator
- Unitary operator 정의 : if 일때 가 unitary operator가 된다.
- 즉, =
- 따라서 이는 크기가 1인 복소수(complex number)와 성질이 매우 유사함.
- 라고 할때,
- unitary operator는 벡터의 방향은 바뀌지만 원래의 길이가 변하지 않고 그대로 유지된다는 성질을 가진다
Trace
- Operator의 Trace는 n차원 공간에서 정의된 operator의 합과 같다.
- 성립. 이 성질의 증명과정은 생략..(스칼라값이기 때문에 순서에 구애받지 않음)
- 행렬에서는, 행렬의 대각 행렬들을 모두 더하는 것이 trace가 된다.
Eigenvalue
- linear operator 에서, 를 만족할때 를 의 Eigenvector, 값을 의 Eigenvalue라고 한다.
- 따라서 Eigenvalue problem에서 을 만족하는 , 를 찾아야 함.
- 벡터의 Eigenvalue를 구하는 과정은 행렬과 관련이 있다. 벡터 자체로는 고유값을 구할 수 없고, 주어진 행렬과 그 행렬의 고유벡터를 사용하여 고유값을 계산하게됨.
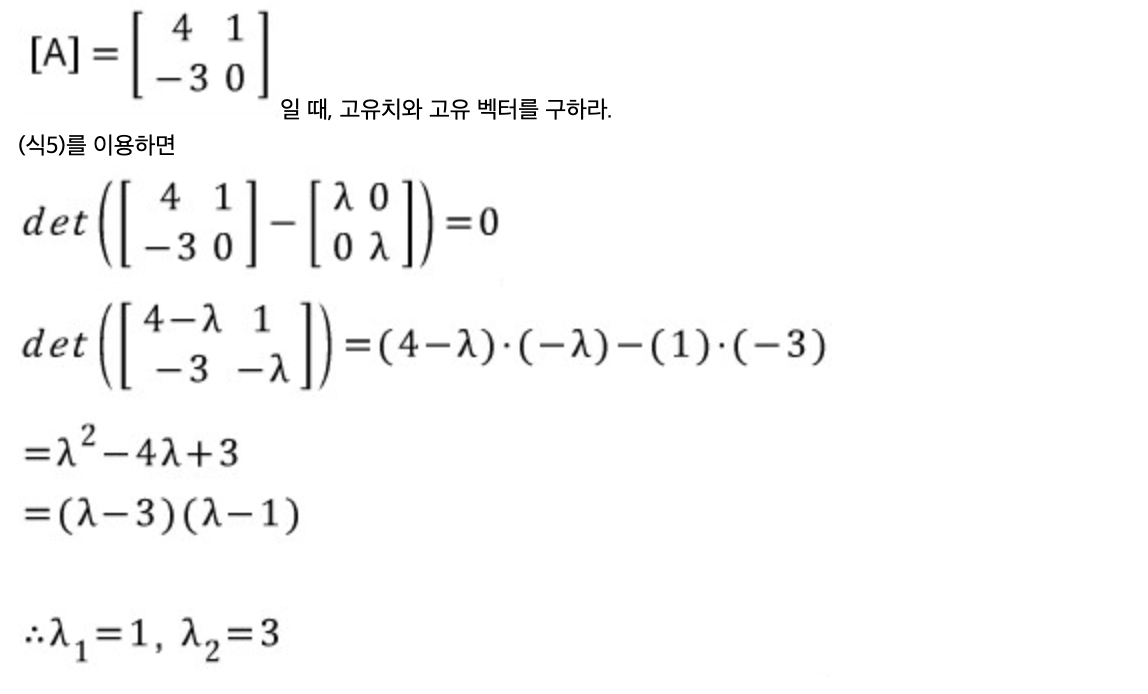
- 고유값을 구하려면 먼저 행렬 의 특성 방정식을 구해야 하며, 방정식은 아래와 같이 나타낼 수 있다. 이때, 가 고유값이 됨.
- 를 만족하는 고유값 를 solve!
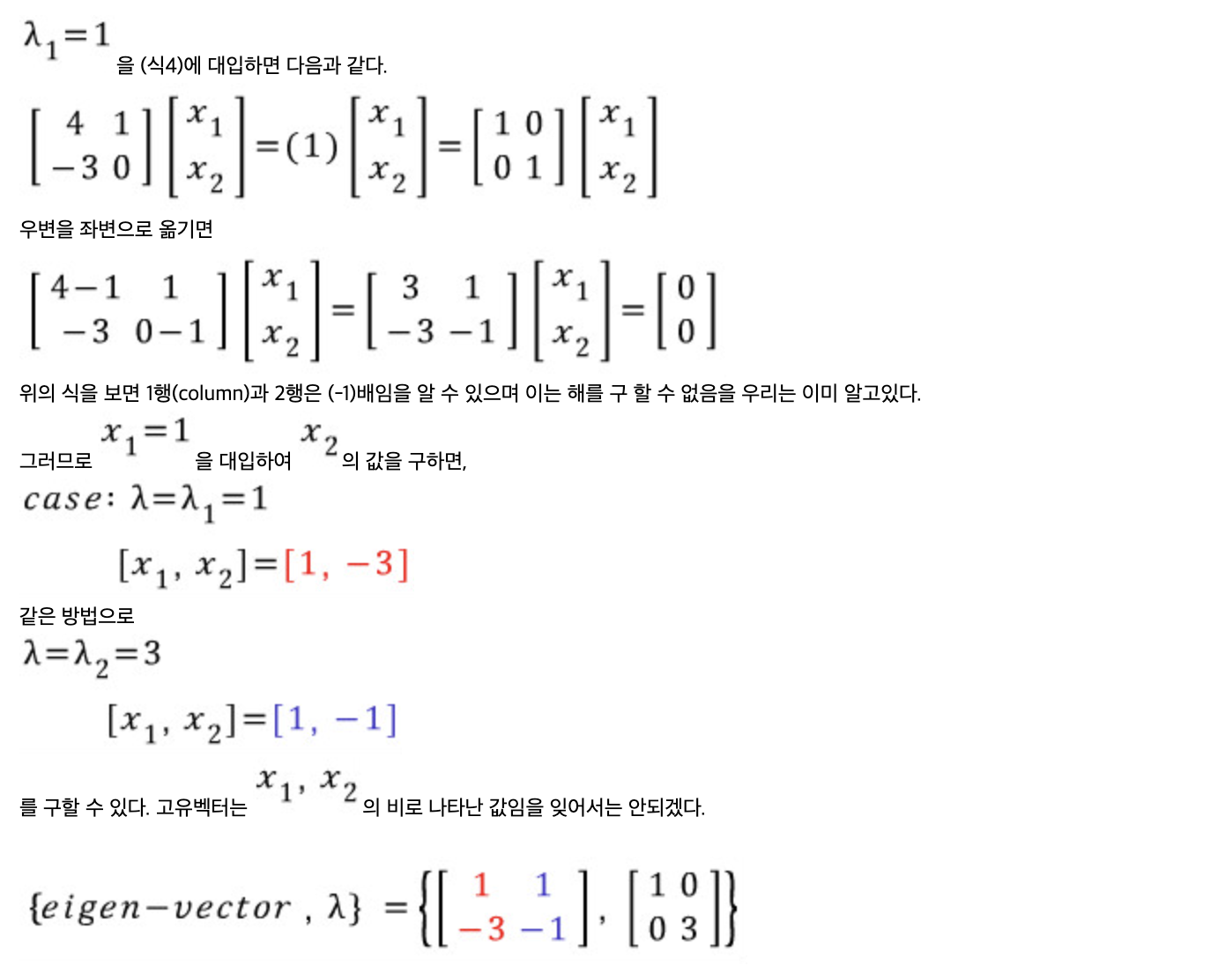
- 이후 구해진 고유값 에 따라, 을 만족하는 를 찾아주면 이것이 고유벡터(Eigenvector)가 된다.
- 인터넷에 Eigenvalue problem solve에 대한 다양한 예시 문제가 있으니 찾아서 몇개 풀어보면 좋을 듯 합니다.
(예시)
구해진 고유값으로 고유벡터 구하기
출처

📚 IT 지식과 최신 기술 트렌드, 금융 관련 내용을 공유합니다.