15. Object Detection
- Approaches
- Two-stage model
consists of a region proposal module and a recognition module- R-CNN, Fast R-CNN, Faster R-CNN
- One-stage model
removes the proposal generating module and predicts object positions directly- YOLO, SSD, DETR
- Two-stage model
15.1. Two-stage model
15.1.1. R-CNN
(참고: zzwon1212 - R-CNN)
-
Stage 1: Region proposals
- extract ~2k region proposals using selective search.
-
Stage 2: Object recognition
- extract feature map using CNN from each proposal.
- classify the feature vector
- regress the feature vector
-
Why R-CNN?
- First modern deep learning based image detection
- Significantly reduced computation from the brute-force method
- Detection performs okay
-
Why NOT R-CNN?
- Computationally expensive
- region proposal
- ~2k independent CNN forward passes for each proposal
- Computationally expensive
15.1.2. Fast R-CNN
(참고: zzwon1212 - Fast R-CNN)
-
Stage 1: Region proposals
- same as R-CNN
-
Stage 2: Object recognition
- extract (shared) feature map using CNN from one entire image
- apply RoI Pooling Layer
- projects each proposal onto shared feature map to get own feature map
- apply max-pooling to own feature map to get fixed-length feature vector
- classify and regress the feature vector using fc layers

-
Why Fast R-CNN?
- Better accuracy than R-CNN
- 8~18x faster trainig time than R-CNN
- 80~213x faster inference time than R-CNN
- Much less memory space needed
-
Why NOT Fast R-CNN?
- Still using an off-the-shelf region proposal, which is computationally expensive. This is the main bottleneck of Fast R-CNN.
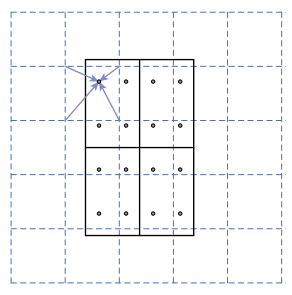
### 15.1.3. Mask R-CNN
- RoIAlign
Instead of simply taking max over uniformly split RoI, use linear interpolation to better estimate feature values at each cell.
15.1.4. Faster R-CNN
- Stage 1: Training RPN (Region Prposal Network)
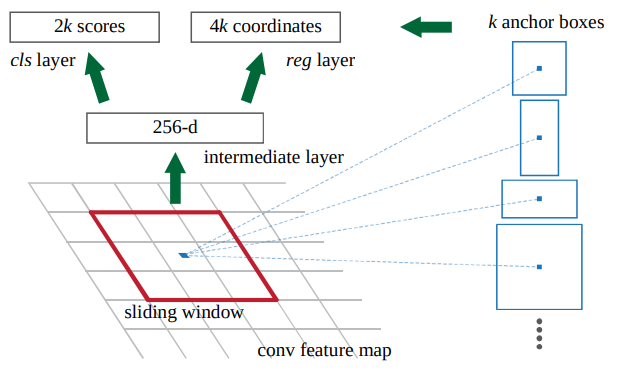
- For each position in the last shared conv feature map, suppose a set of candidate bounding box called anchor.
- We will predict 2 scores (object or not) and 4 coordinates for each anchor.
- apply convolution on the conv feature map to get new feature map with 256 channels.
- apply two separate convolution on the new feature map to get cls feature map with 2k channels and reg feature map with 4k channels.
- Each position in cls feature map and reg feature map has scores and coordinates for anchors for that position.
-
Stage 2: Same as Fast R-CNN
- Using the RPN trained in Stage 1, perform RoI pooling, classification, and regression.
-
Why Faster R-CNN?

15.2. One-stage model
15.2.1. YOLO
(참고: zzwon1212 - YOLO)
15.2.2. SSD
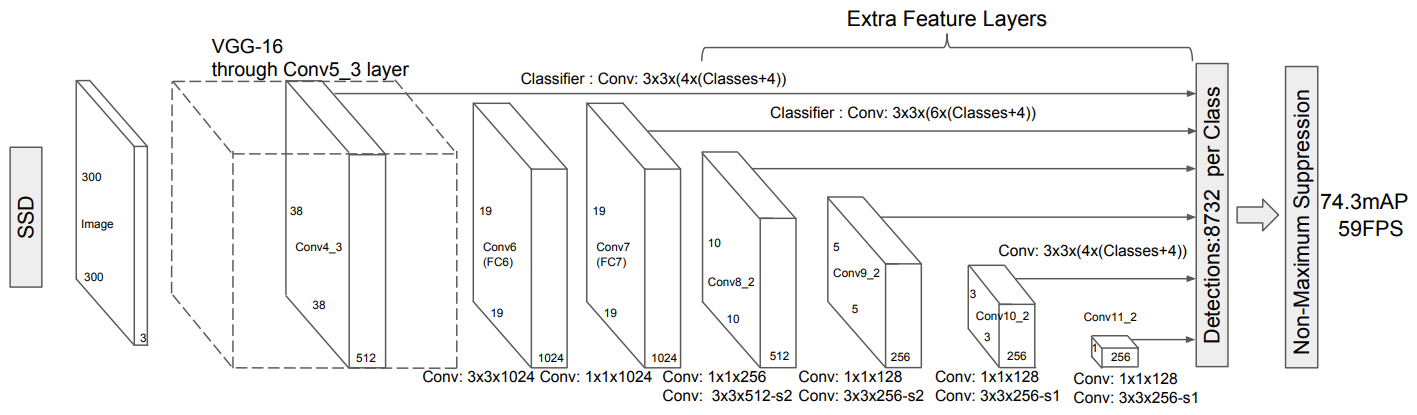
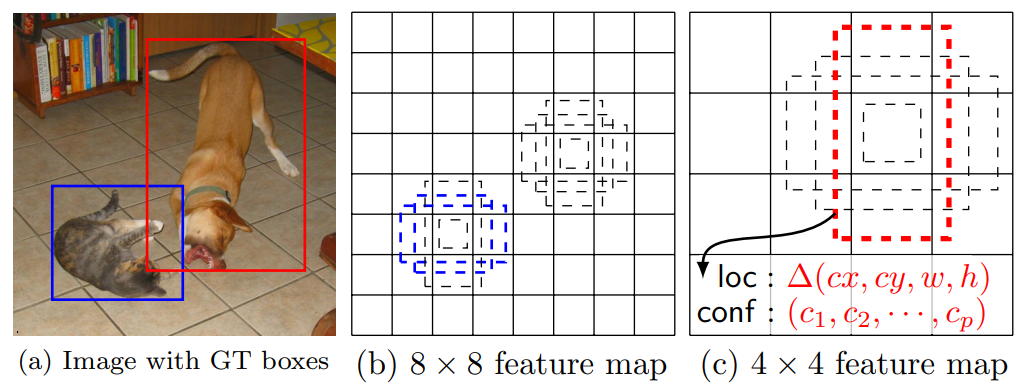
-
Main idea
- Each cell in earier conv layer looks narrow range of the image. So it can detect small objects.
- Each cell in later conv layer looks wider range of the image. So it can detect large objects.
-
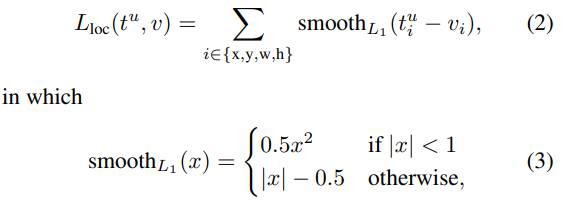
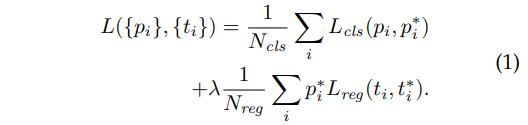
Loss



-
Results
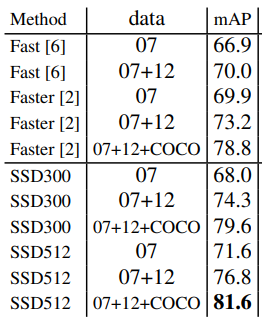
- Accuracy: Fast R-CNN < Faster R-CNN < SSD
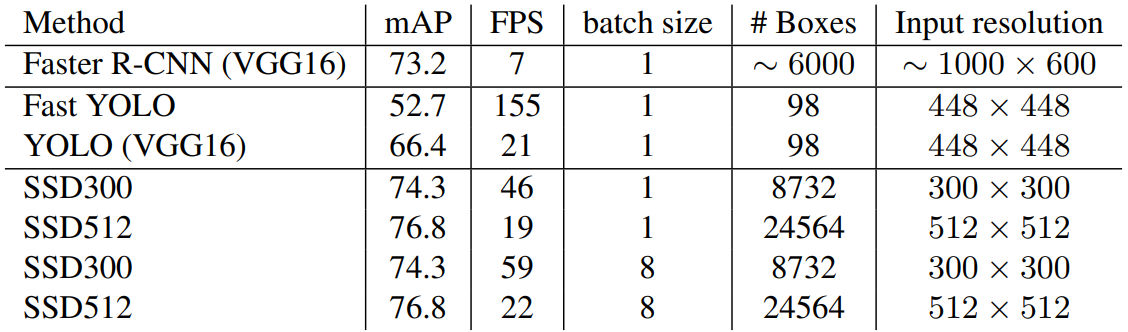
- FPS: Faster R-CNN < SSD < YOLO
- Accuracy: Fast R-CNN < Faster R-CNN < SSD
15.3. Transformer-based Approach
15.3.1. DETR (Detection Transformer)
-
Main idea
- A set-based global loss that forces unique predictions via bipartite matching.
- Removing the need for many hand-designed components like a NMS.
-
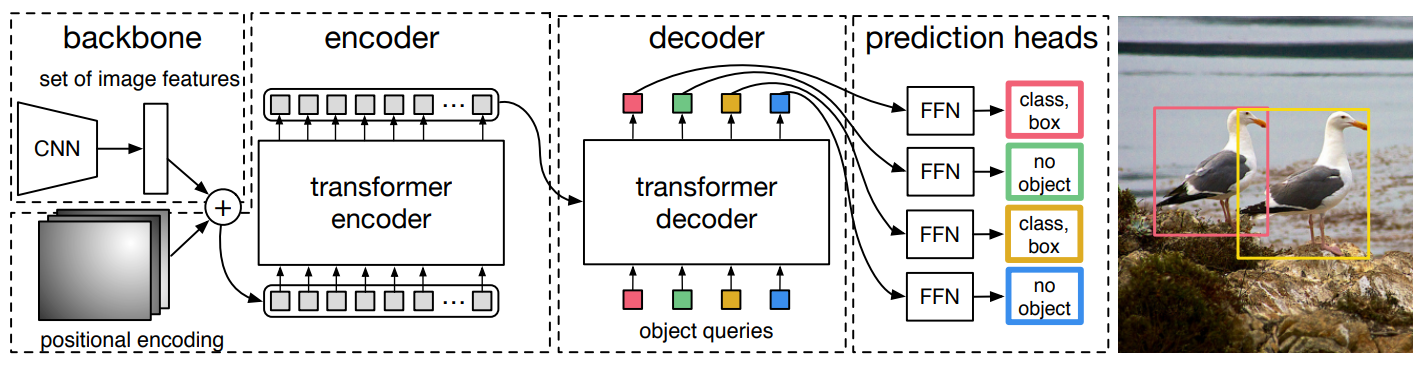
Architecture
- A CNN backbone extracts spaital features:
- Fixed positional encoding for each location (sinusoidal)
- For spatial features as input tokens, a Transformer encoder contextualizes them throughout the entire image.
- Starting from object queries (learnable positional encodings), a Transformer decoder outputs embeddings corresponding to the objects to be detected in the image.
- Through fully-connected layers, each object embedding is mapped to its class and bounding box coordinates.
-
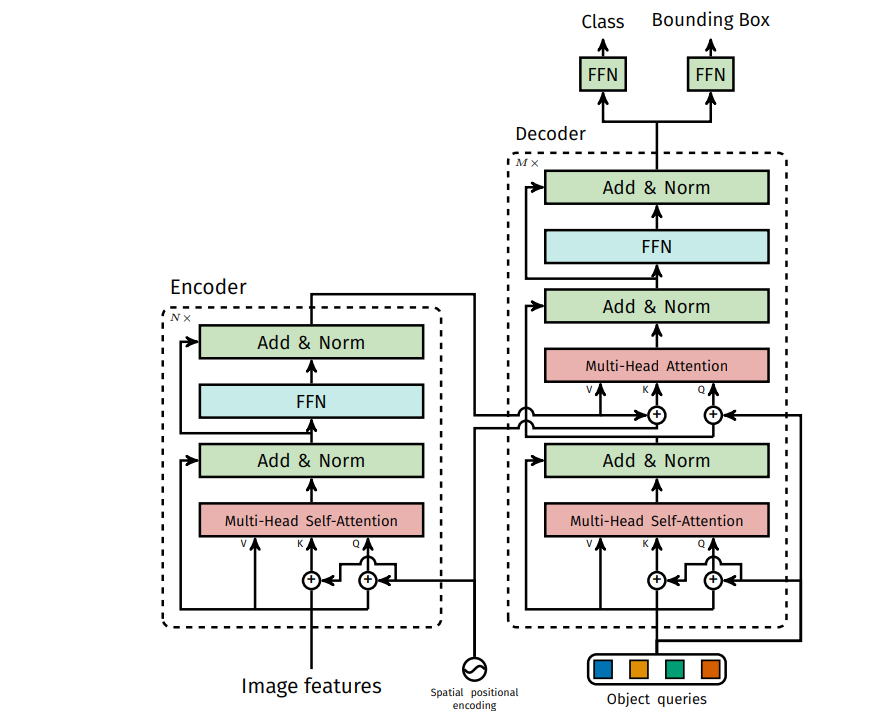
Difference from the original Transformer
- Outputs are produced in parallel, as opposed to autoregressive manner. This is because there is no obvious order between objects in the image.
- Positional encoding is applied only to the queries and keys.
- Positional encoding is added at every layer. (No proof but experimental evidence)
-
Training
- Because there is no natural order among objects in the image, we actually do not know which box is for which object. How should we score a prediction when we compute loss?
- DETR infers a fixed-size set of predictions, wher is significantly larger than typical number of objects in an image.
- Suggested solution: an optimal bipartite matching between predicted and ground truth objects is performed, then object-specific bounding boxes are optimized independently.
-
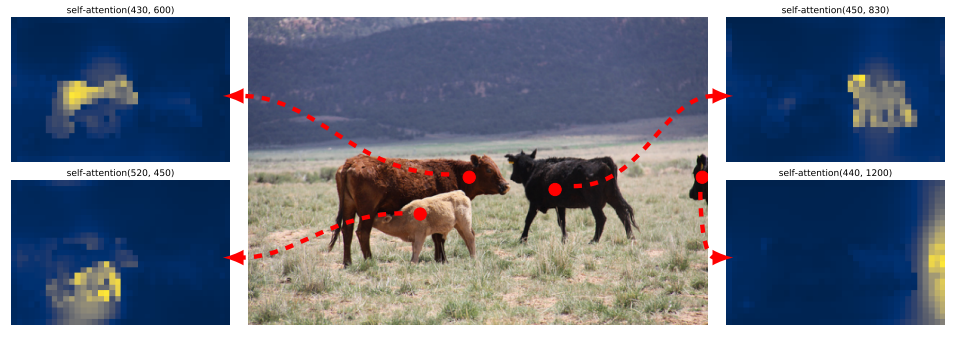
Results
- Encoder self-attention is able to separate individual instances.
- Attention socres for every predicted object. Decoder typically attends to object extremities.
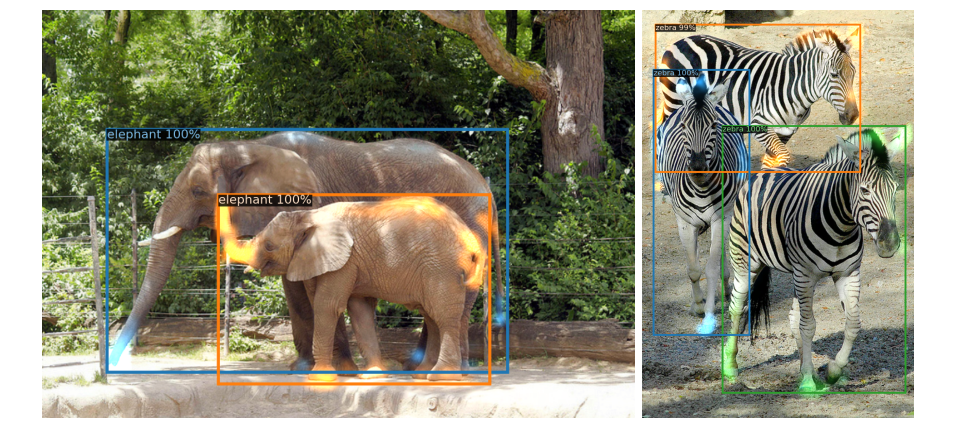
- Limitations: underperforms on small objects (https://github.com/facebookresearch/detr/issues/216)
- Encoder self-attention is able to separate individual instances.
📙 강의

JUST DO IT.