1. 패키지
1.1. 디렉토리 구조
- ~/xycar_ws
- build
- devel
- src
- xycar_device
- usb_cam
- xycar_imu
- xycar_motor
- xycar_lidar
- xycar_ultrasonic
- realsense2_camera
- xycar_device
1.2. 노드&토픽 정보
| 장비 | 노드 정보 | 토픽 정보 | 연결 |
|---|---|---|---|
| 카메라 | /usb_cam | /usb_cam/image_raw | 발행 |
| IMU 센서 | /xycar_imu | /imu | 발행 |
| 라이다 | /xycar_lidar | /scan | 발행 |
| 초음파 센서 | /xycar_ultrasonic | /xycar_ultrasonic | 발행 |
| Depth 카메라 | /camera/realsense2_camera | /camera/color/image_raw | 발행 |
| /camera/depth/image_rect_raw | 발행 | ||
| 모터제어기 | /xycar_motor | /xycar_motor | 구독 |
2. 노드와 토픽 구성
2.1. 모터 제어
-
구조
- 프로세서 보드 → VESC 장치: 2개의 제어신호 생성
- 구동 모터(Wheel Motor)
- 전진/후진, 속도
- 값 범위: 후진 MAX(-50) ~ 전진 MAX(50)
- 조향 모터(Steering Motor)
- 좌/우회전(최대 각도 20도)
- 값 범위: left MAX(-50) ~ right MAX(50)
- 구동 모터(Wheel Motor)
- 프로세서 보드 → VESC 장치: 2개의 제어신호 생성
-
토픽 정보 확인
[header(seq, stamp, frame_id), angle, speed] 구조체를 담은 Custom 메시지이다.$ roscd xycar_motor # 패키지 확인 # '장애물 회피 주행' 실행 후 $ rostopic list # 토픽 리스트 확인 $ rostopic info /xycar_motor # 토픽 정보 확인 $ rostopic type /xycar_motor # 토픽 타입 확인 $ rosmsg show xycar_msgs/xycar_motor # 메시지 정보 확인 $ rostopic echo xycar_motor # 발행되고 있는 토픽을 실시간으로 출력 $ rqt_graph # 메시지와 노드 연결을 시각화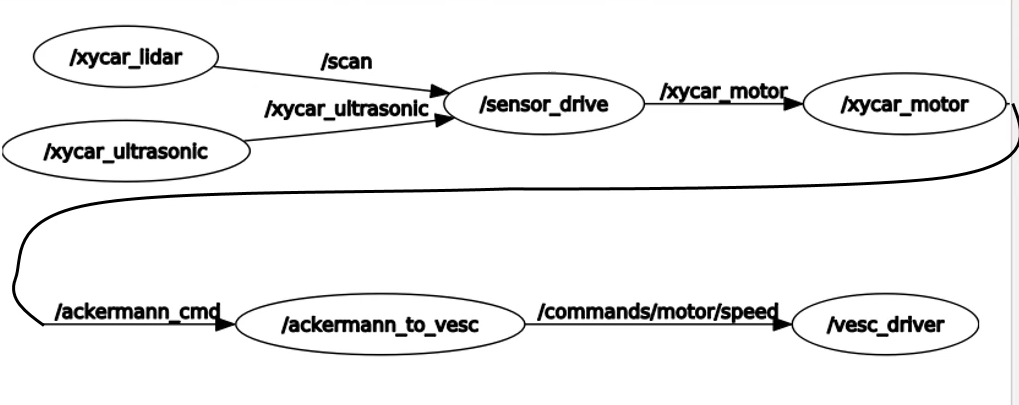
-
토픽 발행 주기: 0.7초 동안 도착하는 토픽이 없으면 속도와 조향각이 0으로 세팅된다.
2.2. 차선 추종 주행
# '자율 주행' 실행 후
$ rqt_graph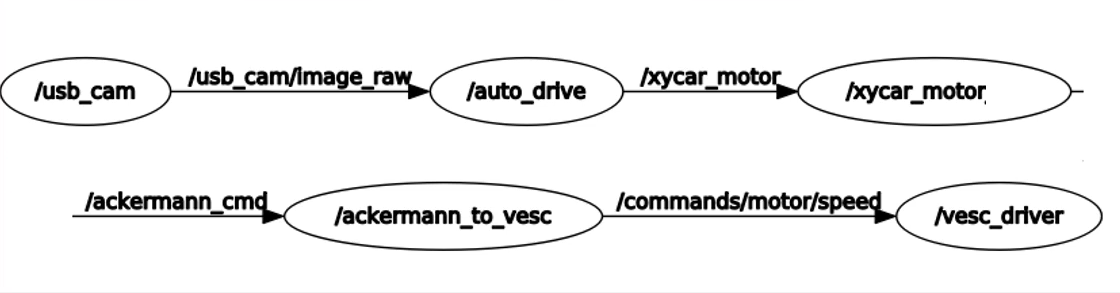
- 실행된 영상에 표시되는 정보
화면의 중앙을 차선 중앙에 맞추기 위해 조향각을 조정한다.- 파란색 선: 차선
- 녹색 사각형 3개: 왼쪽 차선, 차선 중앙, 오른쪽 차선
- 빨간색 사각형: 화면의 중앙
2.3. 장애물 회피 주행
# '장애물 회피 주행' 실행 후
$ rqt_graph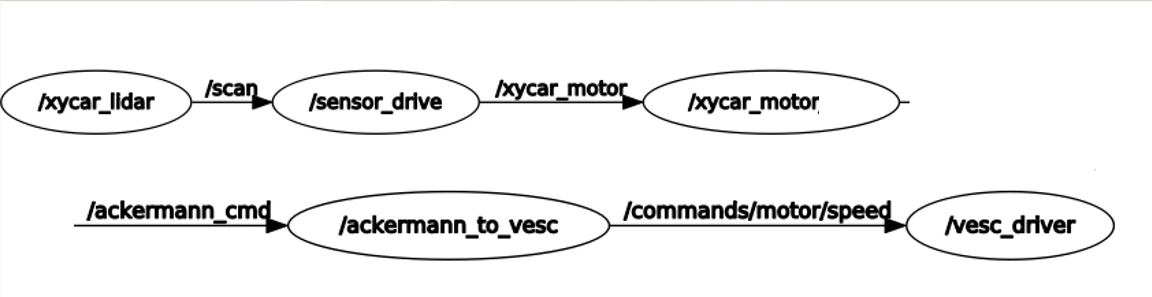
2.4. 사람 인식 주행
YOLO를 활용하여 영상에서 사람을 찾은 뒤, 장애물을 피하면서 찾은 사람 방향으로 운전한다.
# '사람 인식 주행' 실행 후
$ rqt_graph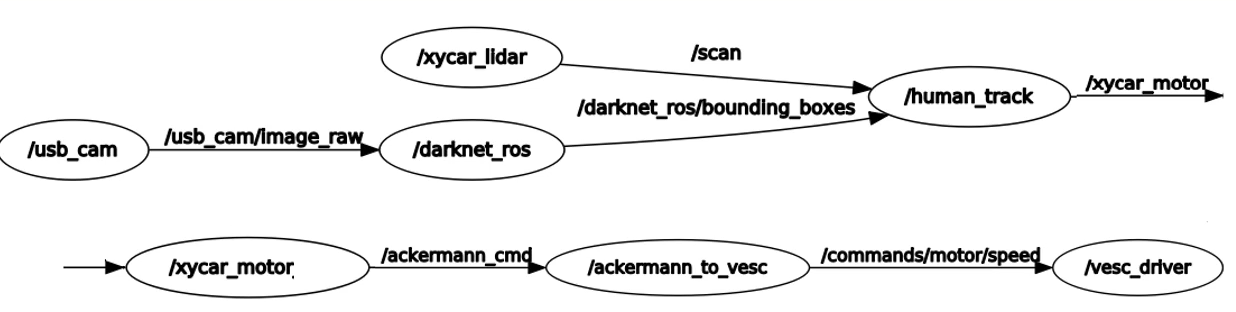
2.5. 수동 조종 주행
# 자이카 '조이스틱 제어', 스마트폰 '자이카 조이스틱' 실행 후
$ rqt_graph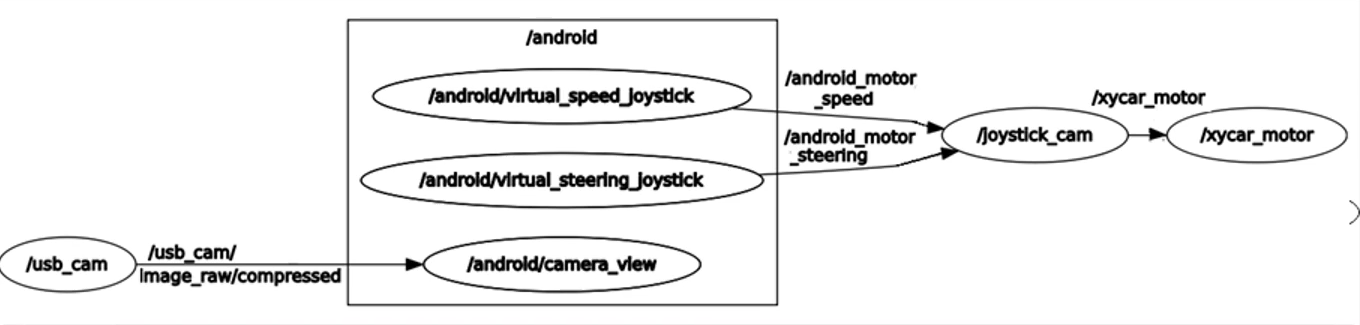
2.6. 센싱 데이터 시각화
그래픽으로 센싱 데이터를 표시하는 각종 데이터 뷰어를 실행한다.
# '뷰어 실행' 실행 후
$ rqt_graph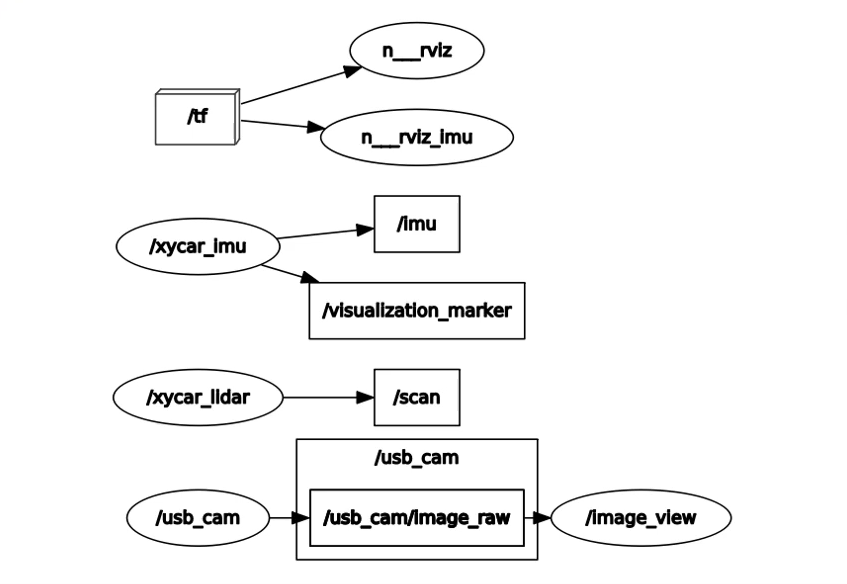
📙강의 - (주)자이트론 대표이사 허성민

JUST DO IT.