Forward Mapping VS Backward Mapping
-
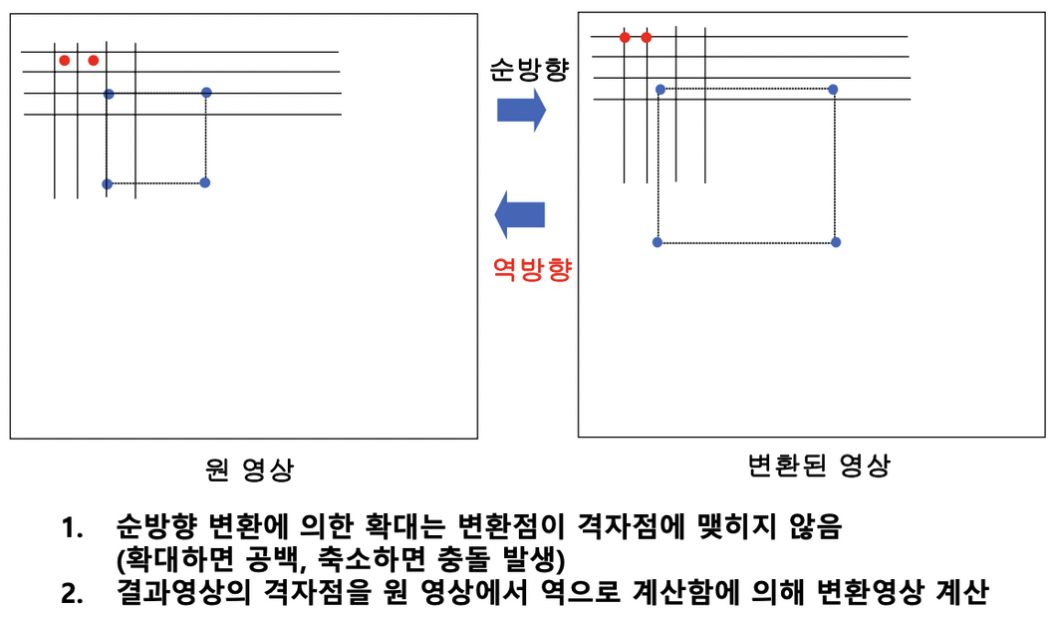
순방향 매핑 (forward mapping) (원본 → 목적)
- 원본 이미지의 픽셀을 하나씩 목적 이미지으로 이동시킴
- 이미지상에서 공백이나 충돌이 발생
-
역방향 매핑 (backward mapping) (목적 ← 원본)
- 목적이미지에서 채울 값을 원본 이미지에서 가져옴.
- 시
- 실제 구현에서 역방향 매핑을 많이 사용!
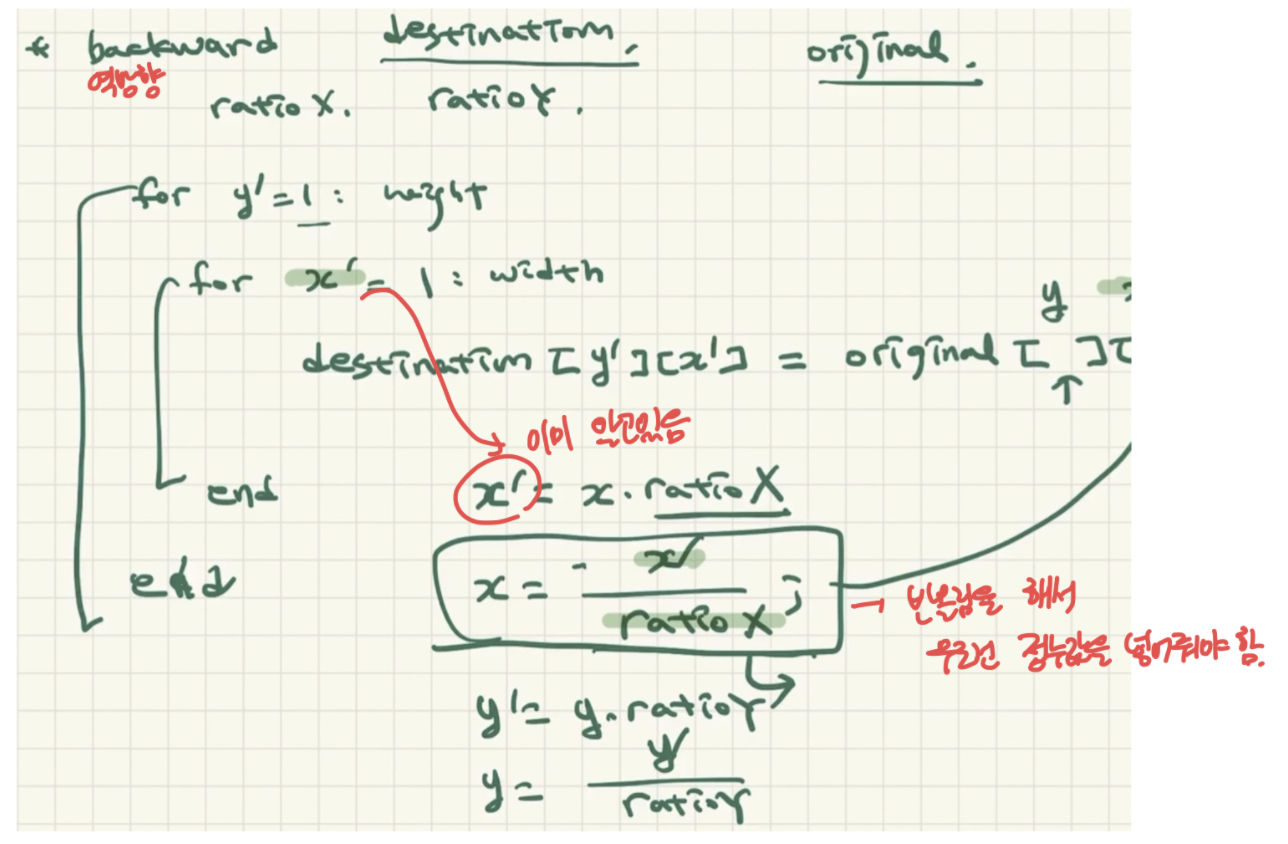
영상의 확대 축소
- 역방향 매핑 사용
- 실수 배의 영상 확대도 가능
- 확대 - 목적 이미지의 크기를 배율에 의해 계산 후 그 지점에서 밝기 값 가져옴.
- 축소 - 목적 이미지에서 밝기 값을 선택할 때 간단하게 원 이미지상의 한 점에서 밝기 값 이용해서 대표 밝기를 구함

- x’ : 목적 x좌표
- x : 원래 x좌표
- ratio는 독립적이라서 각각 다른 비율로 할 수 있음
- ex) ratioX = 2, ratioY = 0.5
영상의 보간 (Interpolation)
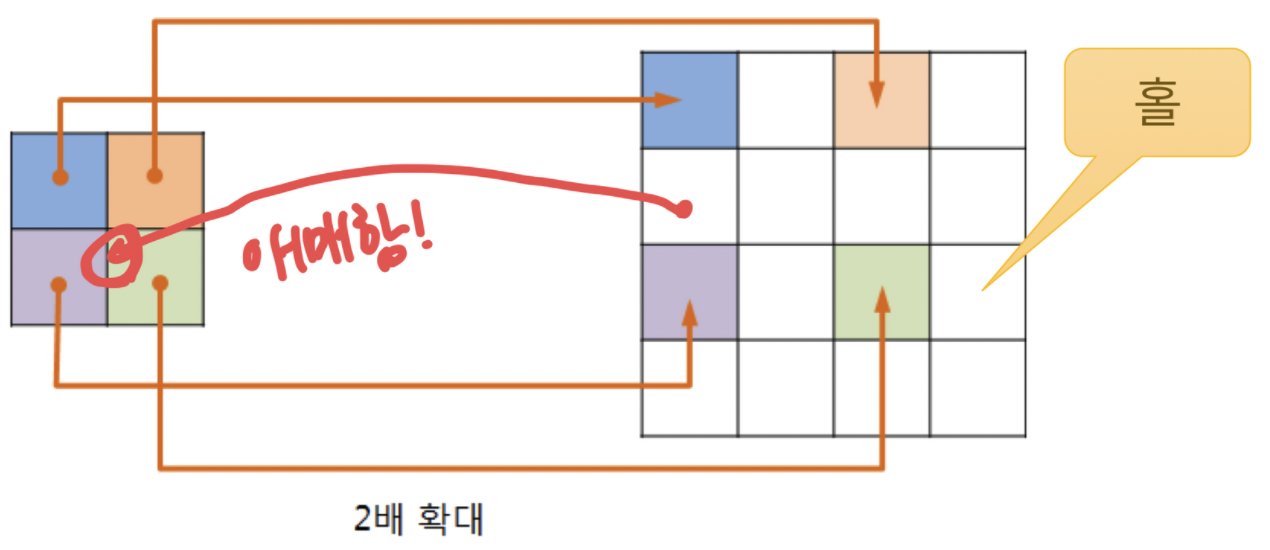
- 역방향 사상을 통해서 홀의 화소들을 입력 영상에서 찾음
- 목적영상에서 홀의 화소들을 채우고(
확대), 오버랩 되지 않게(축소) 화소들을 배치해서 목적영상을 만드는 기법
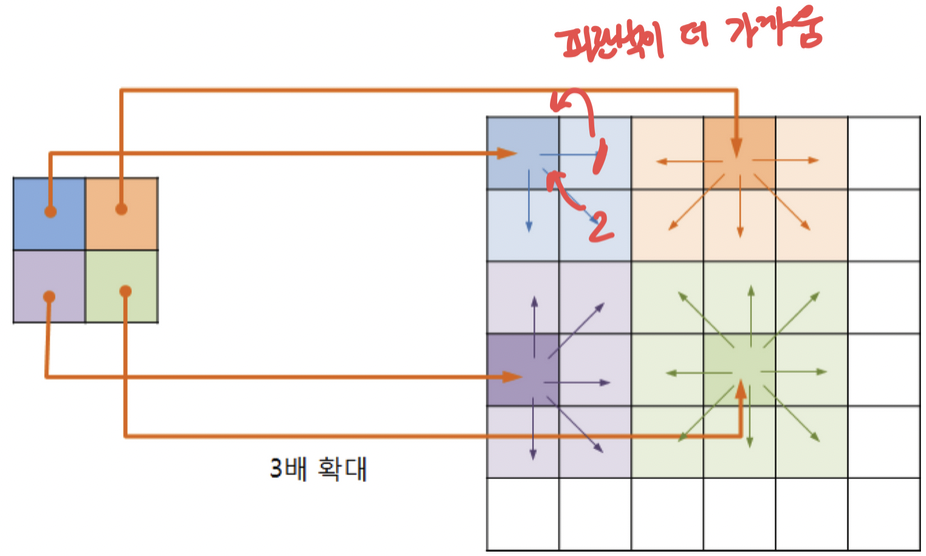
최근접 이웃 보간법 (NN)
- 목적영상의 화소에 가장 가깝게 이웃한 입력영상의 화소값을 가져오는 방법
- 단점 : 확대 비율이 커지면, 모자이크 현상 또는 경계부분에서 계단현상 발생 (화질 나쁨)
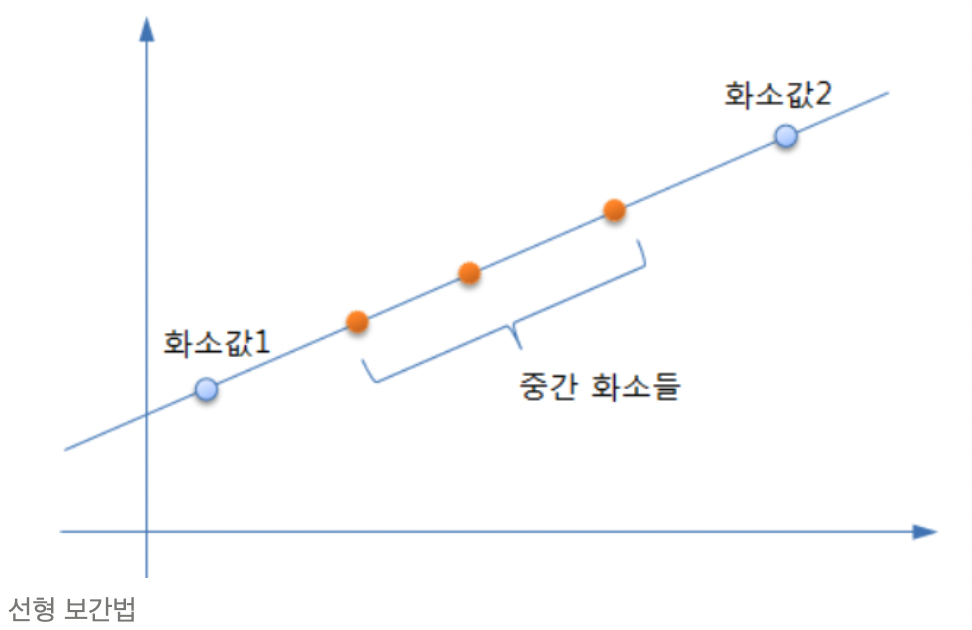
양선형 보간법
- 선형 보간법 : 직선의 선상에 위치한 중간 화소들의 값은 직선의 수식을 이용해서 쉽게 계산
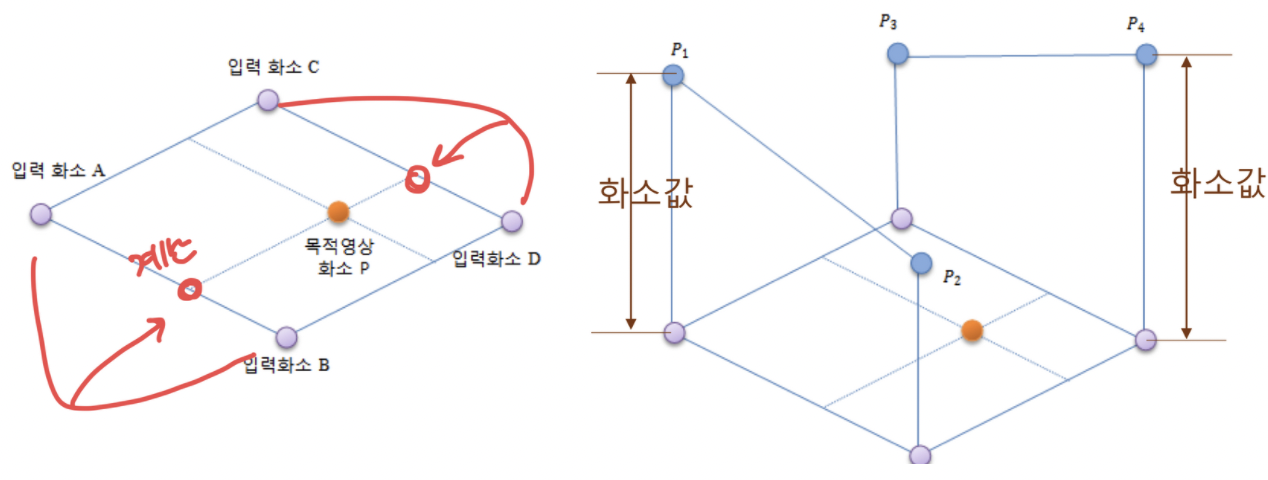
- 양선형 보간법 : 선형 보간을 두번에 걸쳐서 수행.
- 목적영상화소를 역변환으로 계산하여 가장 가까운 위치에 있는 입력 영상의 4개 화소 (A,B,C,D) 값 가져옴
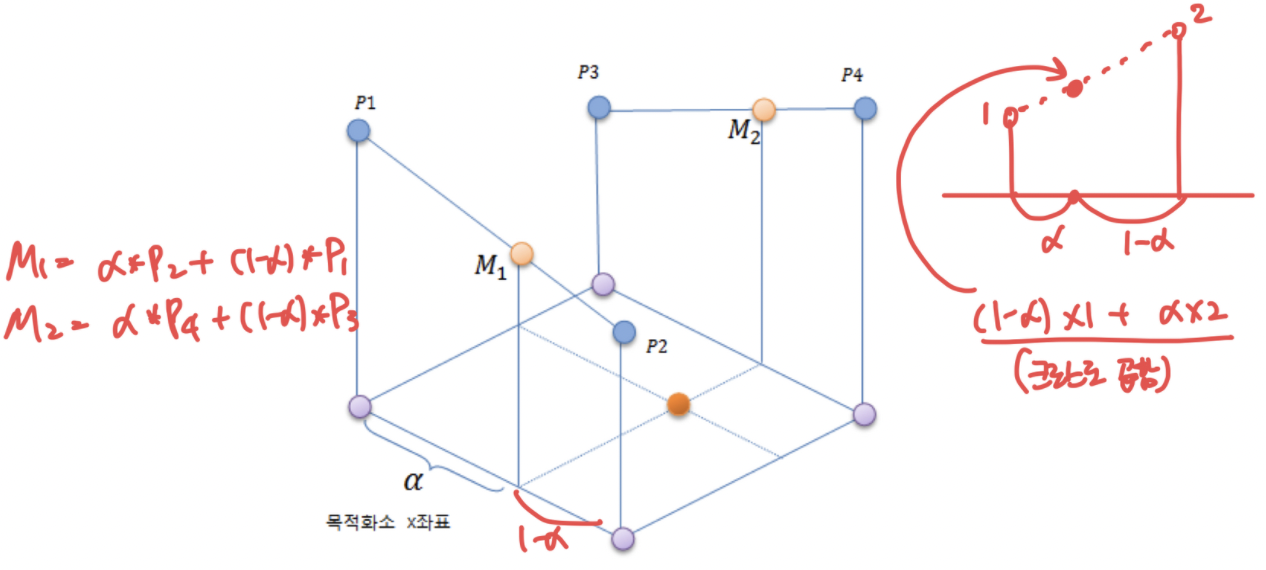
- 4개 화소를 두개씩 (AB) (CD) 묶어서 두 화소의 최소값 (P1, P2, P3, P4)으로 잇는 직선 구성
양선형 보간법을 사용해서 영상 확대 구현
import cv2 as cv
import numpy as np
src = cv.imread("Mandrill.bmp", cv.IMREAD_COLOR)
H,W,C = src.shape[:]
ratioX = 2 #row
ratioY = 3 #col
output = np.zeros((H * ratioX, W * ratioY, C), src.dtype)
for xd in range(H*ratioX):
for yd in range(W*ratioY):
for L in range(3):
x = xd / ratioX
y = yd / ratioY
X = int(x)
Y = int(y)
beta = x - X
alpha = y - Y
#양선형 보간
if (-1 < X < H and -1 < Y < W and -1 < X + 1 < H and -1 < Y + 1 < W):
# 가로방향 보간
mid1 = (1 - alpha) * src[X][Y][L] + alpha * src[X][Y + 1][L]
mid2 = (1 - alpha) * src[X + 1][Y][L] + alpha * src[X + 1][Y + 1][L]
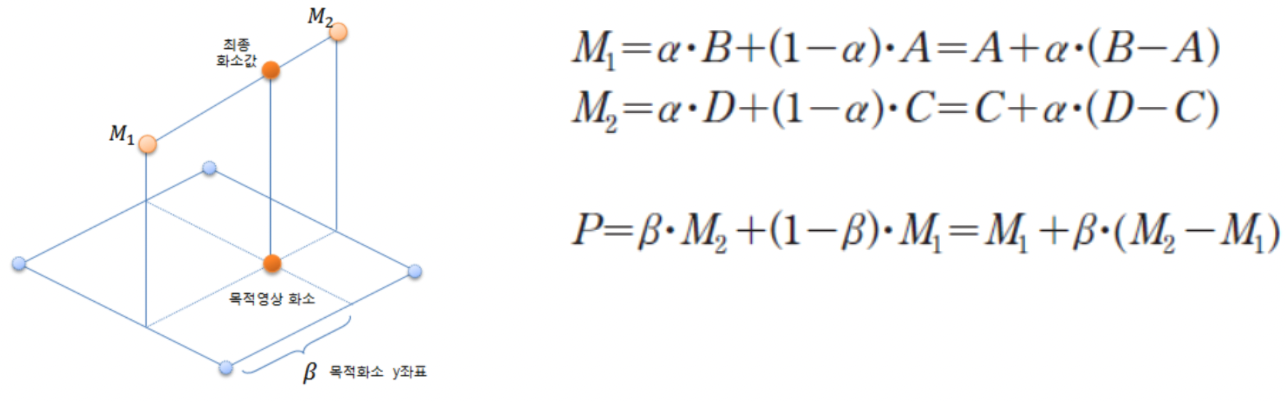
# 세로방향 보간 (최종값)
output[xd][yd][L] = beta * mid2 + (1 - beta) * mid1
cv.imshow("input", src)
cv.imshow("output", output)
cv.imwrite('/Users/jiwonheo/bin/python3/Users/jiwonheo/Development/학교 강의/영상정보처리/lab3/Lowpass_filtering_3.bmp', output)
cv.waitKey(0)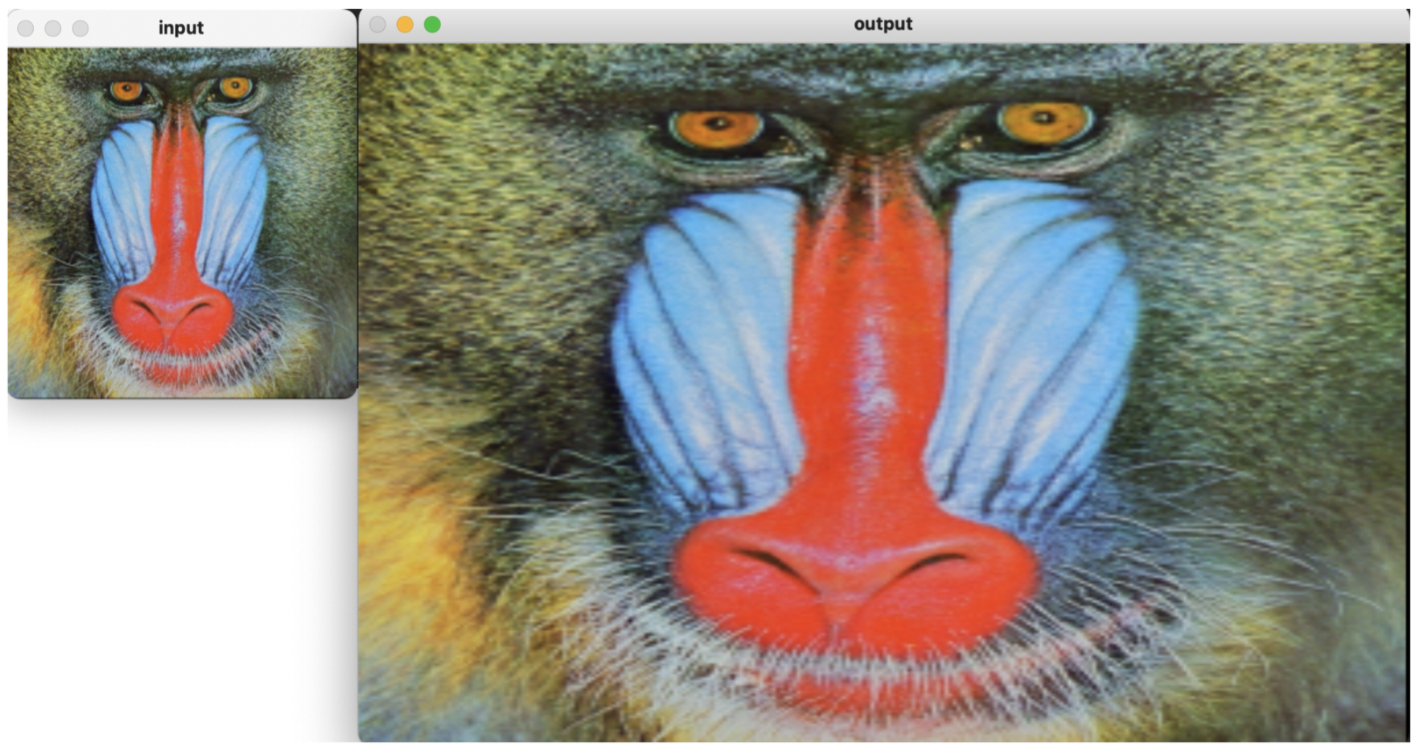
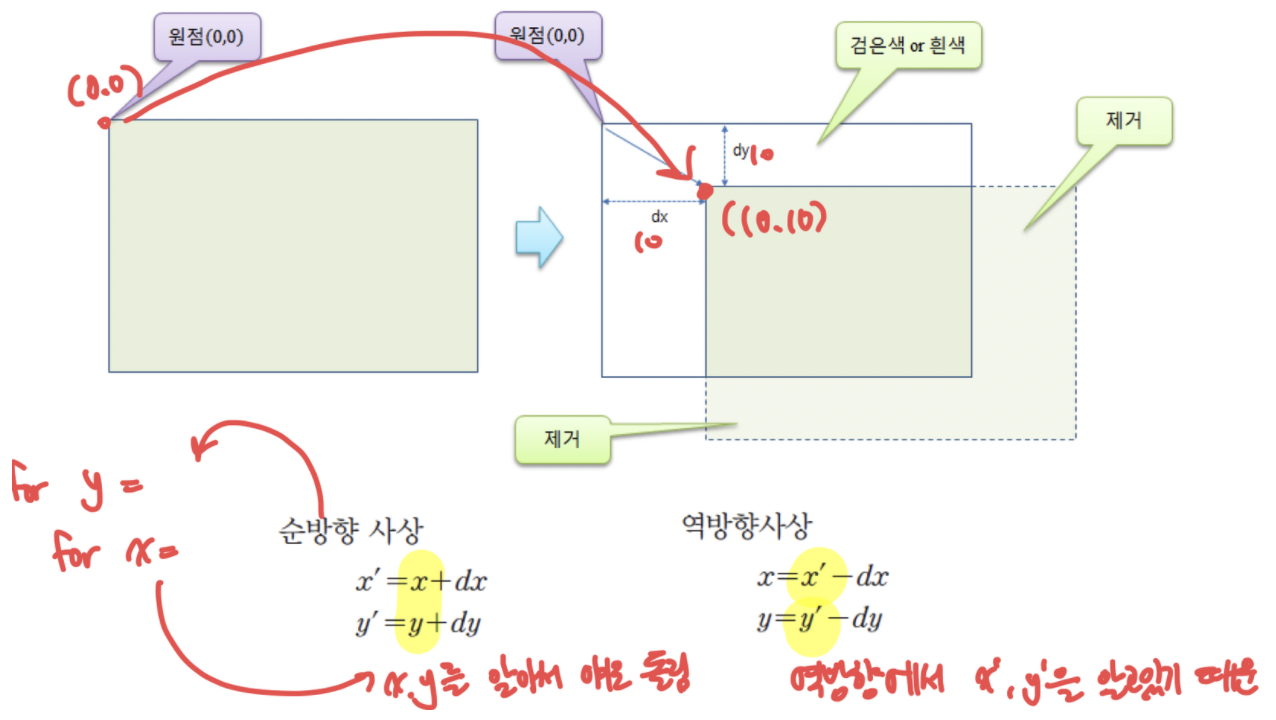
평행이동
- 영상의 원점을 기준으로 모든 화소를 동일하게 가로방향과 세로 방향으로 옮기는 것
- 가로 방향으로 dx만큼, 세로 방향으로 dy만큼 전체 영상의 모든 화소 이동한 예
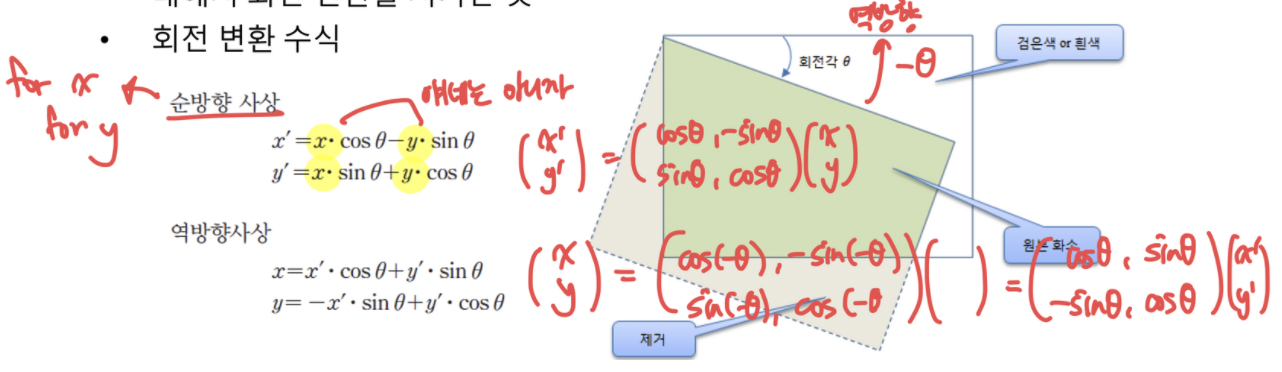
영상의 회전
- 입력영상의 모든 화소를 영상의 원점을 기준으로 원하는 각도만큼 모든 화소에 대해서 회전 변환을 시키는 것.
- 회전 방향
- 원점으로부터 시계 방향으로 정해진 각도만큼 회전된 영상 생성
- 직교 좌표계 - 반시계 방향
- 영상 좌표계 - 시계방향 (y 좌표가 하단으로 내려갈수록 증가하기 때문)
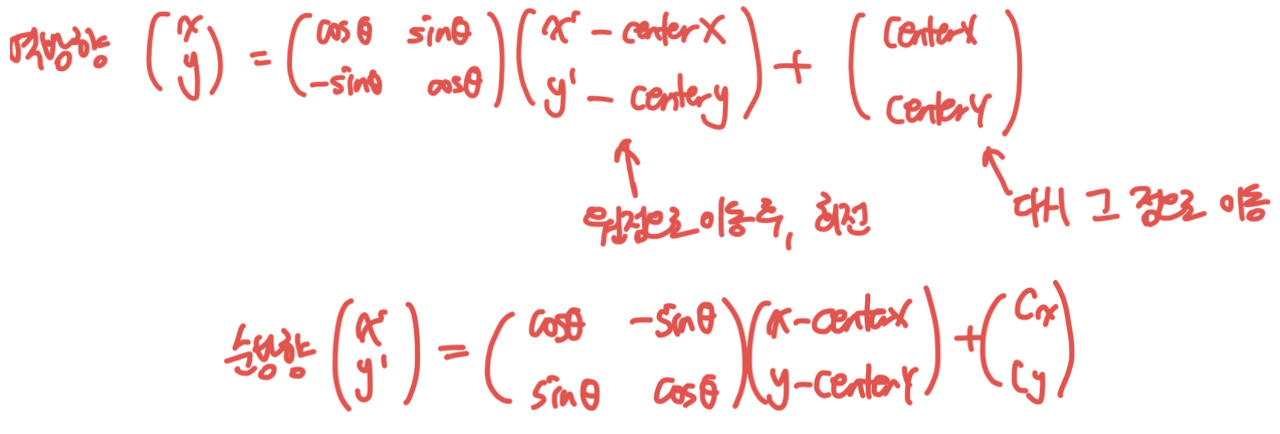
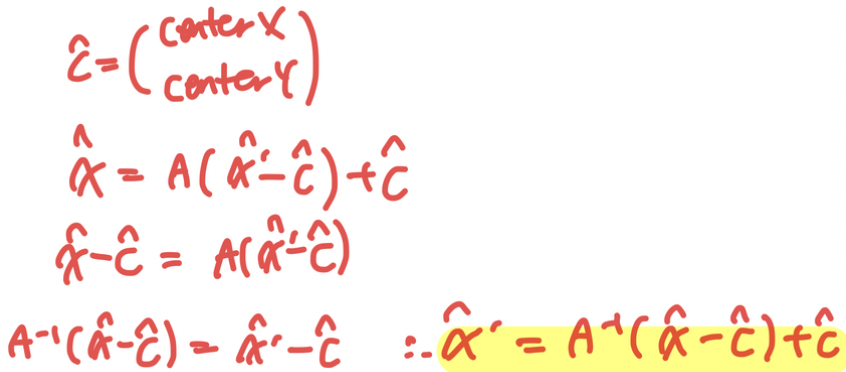
- 특정 좌표에서 회전하는 경우
- 원점으로 이동 → 회전 수행 → 특정 좌표로 이동
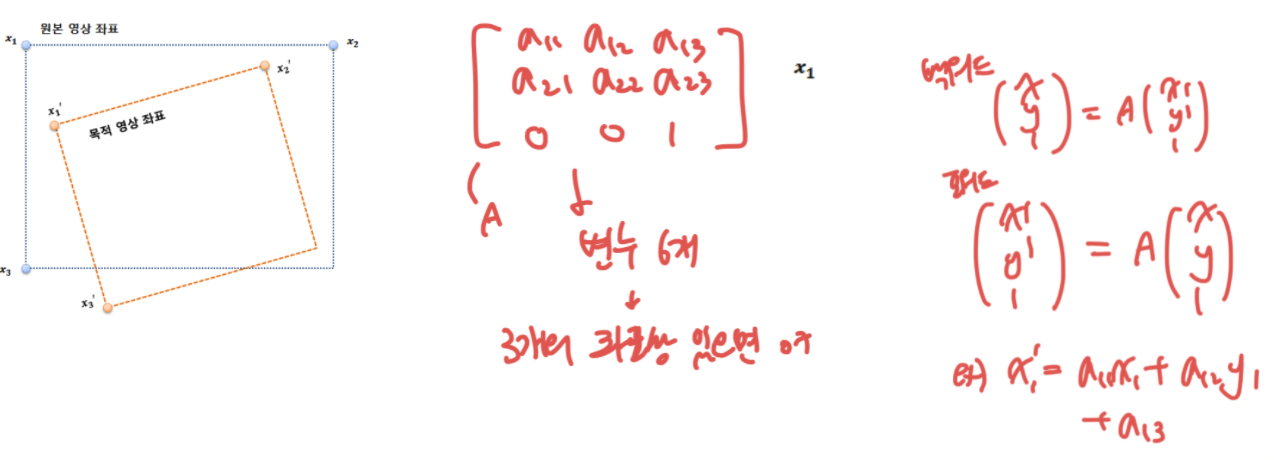
행렬 연산을 통한 기하학 변환 - Affine Transform
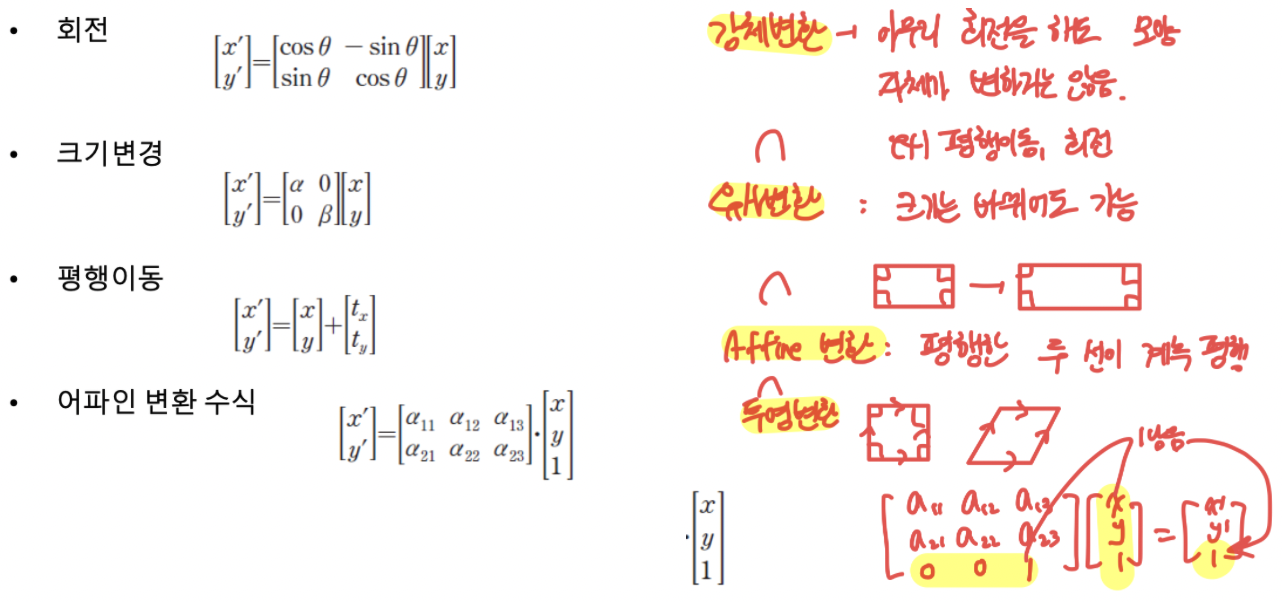

- 입력영상의 좌표 3개( x1 , x2 , x3)와 변환이 완료된 목적영상에서 상응하는 좌표 3개( x1, x2, x3)를 알면 → 어파인 행렬 구성 가능
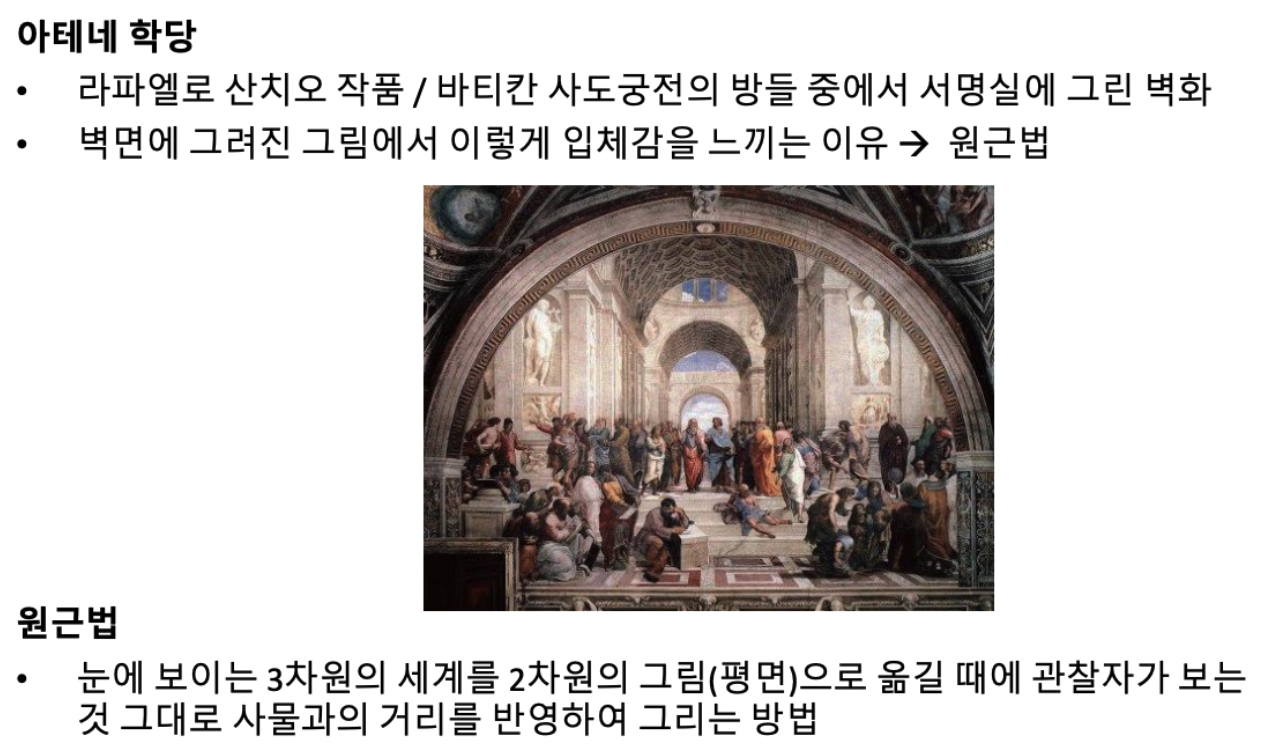
원근 투시 변환 – Perspective Transform (투영변환)

-
동차 좌표계(homogeneous coordinates)
- ← 계산을 편하게 하려고 차원 확장
- 모든 항의 차수가 동일하기 때문에 붙여진 이름으로서 n차원의 투영 공간을 n+1개의 좌표로 나타내는 좌표계
- 직교 좌표인 ( x, y )를 ( x, y, 1 )로 표현하는 것
- 일반화해서 0이 아닌 상수 w에 대해 ( x, y )를 (wx, wy, w)로 표현
- 상수 w가 무한히 많기 때문에 ( x, y )에 대한 동차 좌표 표현은 무한히 많이 존재
-
동차 좌표계에서 한 점(wx, wy, w)을 직교 좌로 나타내면
- 각 원소를 w로 나누어준 (x/w, y/w)가 됨
- 예, 동차 좌표계에서 한 점(5, 7, 5) → 직교 좌표에서(5/5, 7/5) 즉, (1, 1.4)
-
원근 변환을 수행하는 행렬 (Homography)
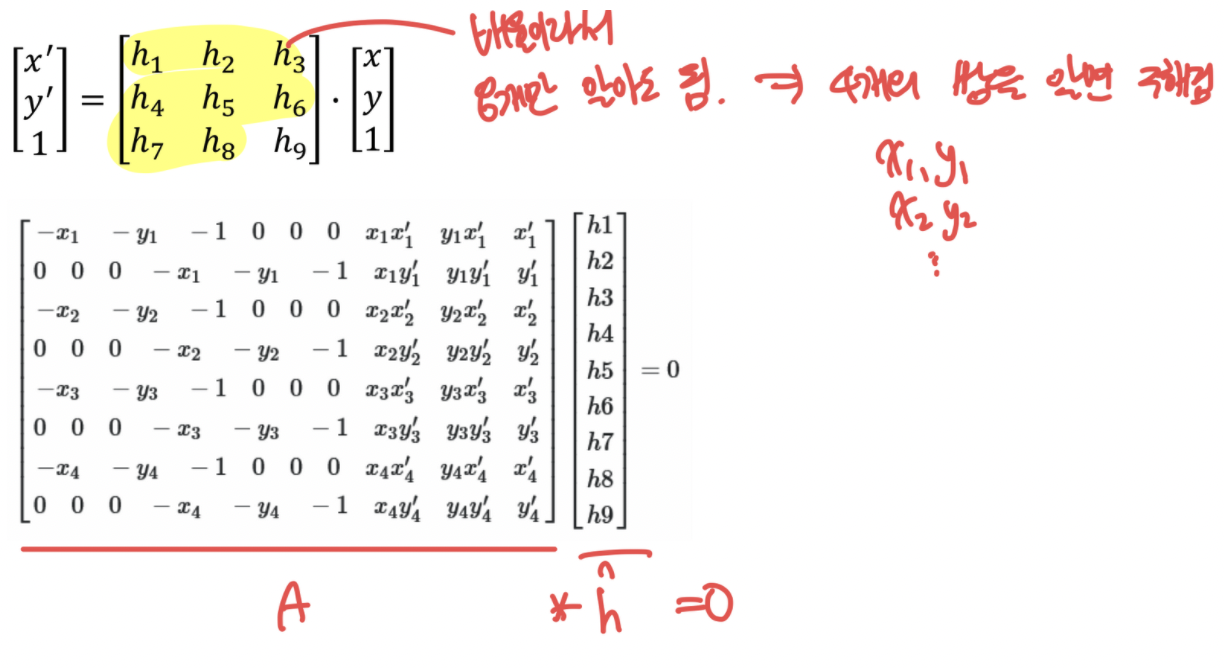

간단한것들 정리