디지털 영상 처리(OpenCV)
1.컬러 처리, 픽셀 단위 연산 처리
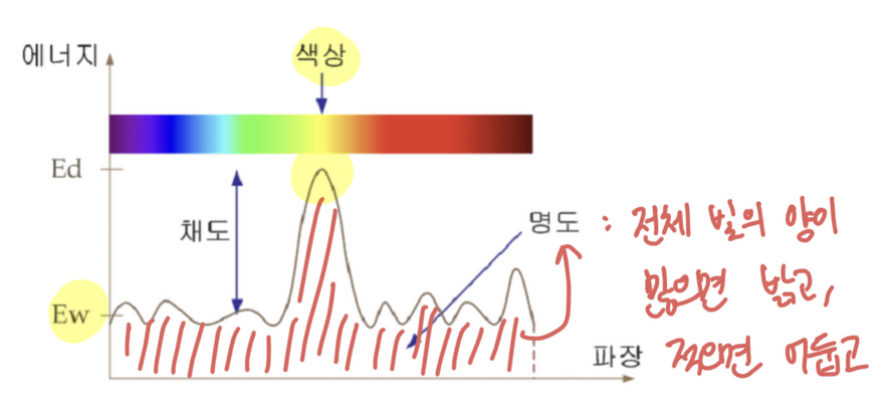
본 시리즈는 정영주 교수님의 2022-2 '영상정보처리' 수업을 정리한 내용입니다. 컬러 처리 색 색상 : 우세주파수의 색상 명도 : 파형 아래 면적 전체 빛의 양이 많으면 밝고, 적으면 어둡고 채도 : Ed(가장 높) - Ew(가장 낮) Ew 작아지면 1)명도 저하 2)색상 인식 어려움 눈 구조 렌즈...
2.히스토그램 획득 및 분석
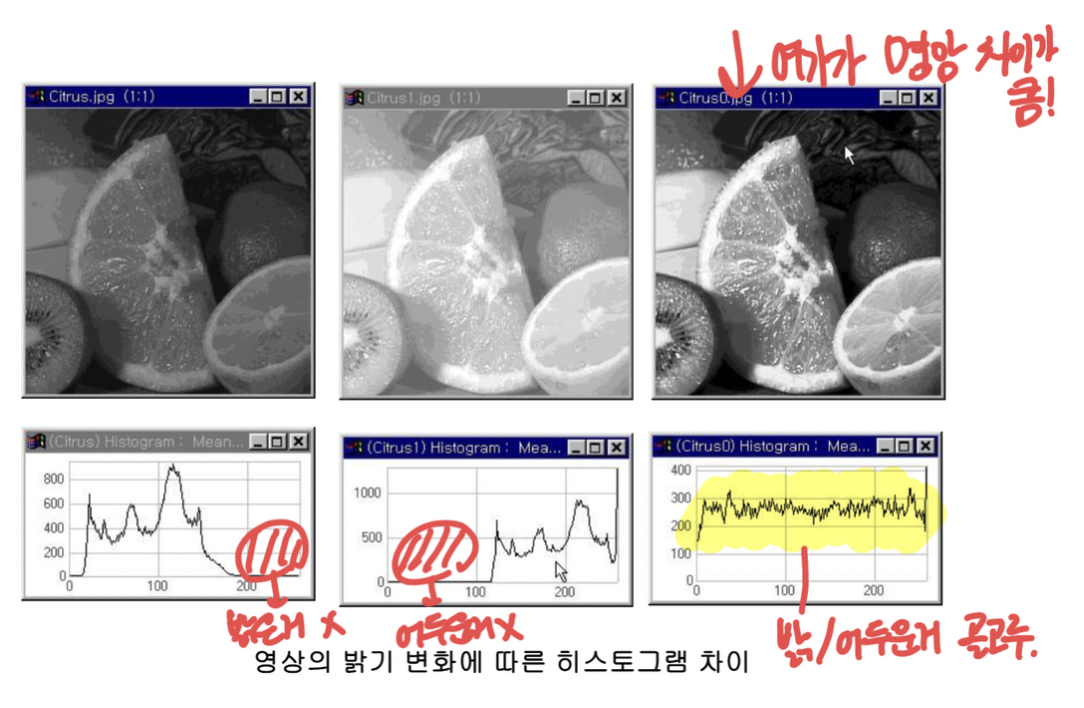
x축(수평축)은 밝기 값, y축(수직축)은 밝기 값에 대응되는 크기를 가진 픽셀 수가 영상 안에서 몇개나 있는지 나타내는 빈도수.히스토그램이 고르게 분포할수록 명암 차이가 큼(=선명함) 히스토그램으로 화질 향상, 자동추출 가능모든 간격의 빈도 수는 같아서 양 끝으로
3.이진화
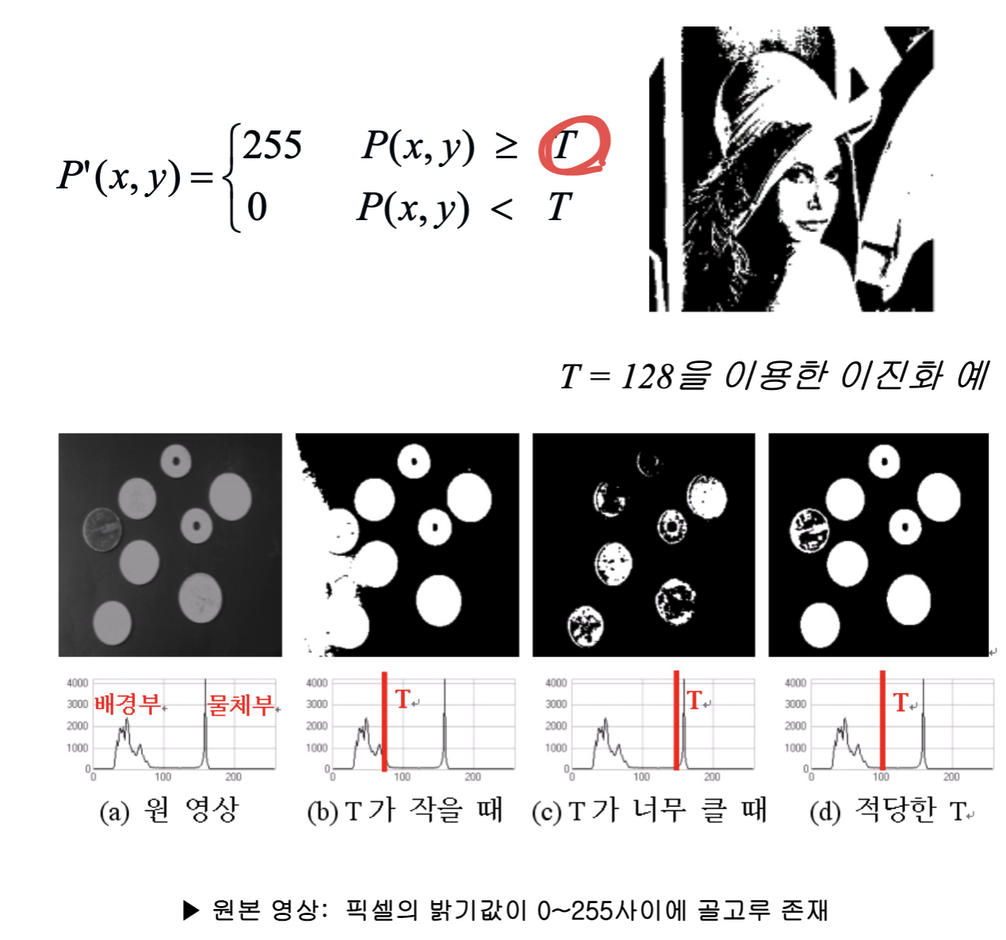
: 2가지 값을 갖는 영상으로 변환: 두 집단의 Variation 합이 가장 작도록 설정.→ 두 산의 중앙을 잘 자르면 됨히스토그램이 bimodal이라고 가정 (2개의 굴곡이 있다고)
4.Morphology
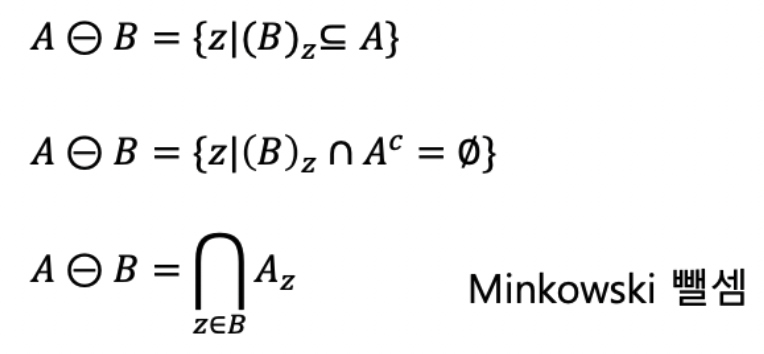
모폴로지(형태적) 기법영상 내에 존재하는 객체의 모양과 구조를 추출영상을 분석하고 처리하는데 사용미리 기하학적 형태를 알고 있는 대상물체의 정보를 반영하여 영상 내에서 원하는 부분만 추출영상 내에는 다양한 물체들이 혼합되어 있으며 우리가 관심을 가지는 나머지 물체들은
5.Geometric Processing
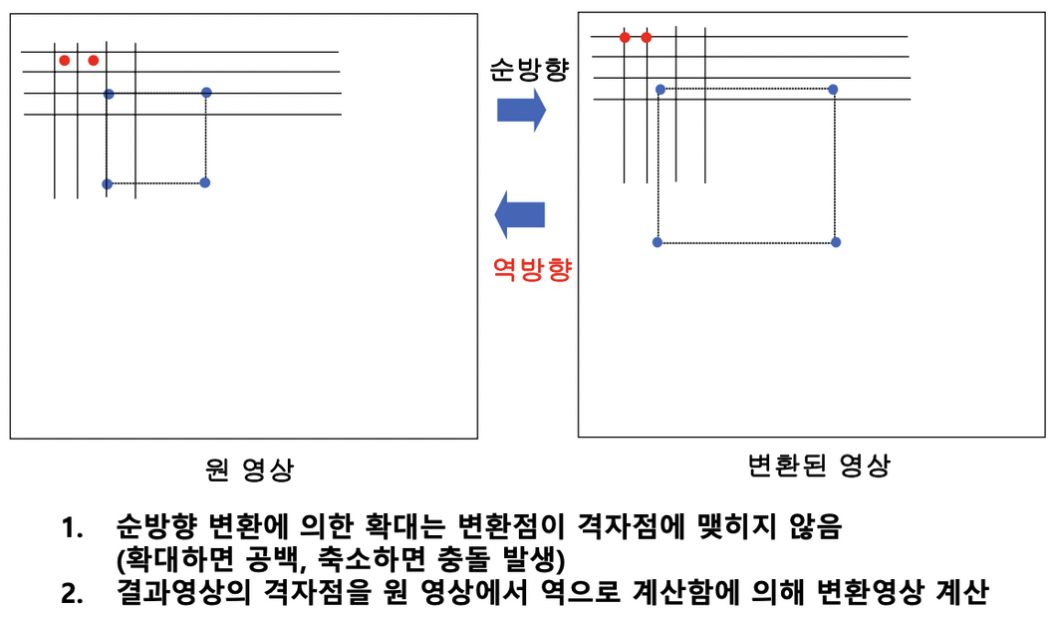
순방향 매핑 (forward mapping) (원본 → 목적)원본 이미지의 픽셀을 하나씩 목적 이미지으로 이동시킴이미지상에서 공백이나 충돌이 발생$I{output} = f (I{input})$역방향 매핑 (backward mapping) (목적 ← 원본)목적이미지에서
6.Segmentation

두번 미분한거한번 미분한 거x, y로 미분한 값은 마스크를 씌워서 얻어짐x미분에서는 x방향이라서 세로 edge가, y 미분은 y 방향이라서 가로 edge가 잘 보임미분에서 배경이 회색인 이유는, 음수값을 만들지 않기 위해서 $\\alpha$ 값이 더해졌기 때문Grad
7.Feature Extraction
Feature ExtractionFeature detection : 찾기Feature description : 묘사하기Some basic descriptors 𝐴 =area 𝑝 = perimetercompactness = $\\frac{𝑝^2}𝐴$ ⬆️ =