Intro
로봇팔에 대한 전반적인 내용과,
Braccio 로봇팔로 수행하는 pick and place 를 다룹니다.
결과 동영상
- 박스를 쌓는 로봇팔
목차
- 로봇팔 개요
1-1. 자주 나오는 용어 설명
1-2. Inverse Kinematics
1-3. MoveIt!
1-4. Braccio Robot Arm - Braccio 로 pick and place 수행하기
2-1. 브라키오에서 ROS 를 사용할 수 있게 세팅하기
2-2. 상자를 keyboard input 에 따라 옮기기
2-3. 상자를 쌓기
1. 로봇팔 개요
1-1. 자주 나오는 용어 설명
-
URDF
Unified Robot Description Format
로봇 모델에 대한 정보들을 기술해 놓은 규격서. -
MoveIt
매니퓰레이터를 위한 통합 라이브러리.
모션 플래닝을 위한 빠른 역기구학 해석, 매니퓰레이션을 위한 고급 알고리즘, 로봇 핸드 제어, 동역학, 제어기 등 다양한 기능을 제공하고 있다. -
Forward Kinematics
로봇의 각 관절 각도가 주어졌을 때 말단 장치의 위치 및 자세를 구하는 것 -
Inverse Kinematics
말단 장치의 위치와 자세가 주어졌을 때 각 관절 각도를 구하는 것.
1-4. Braccio Robot Arm
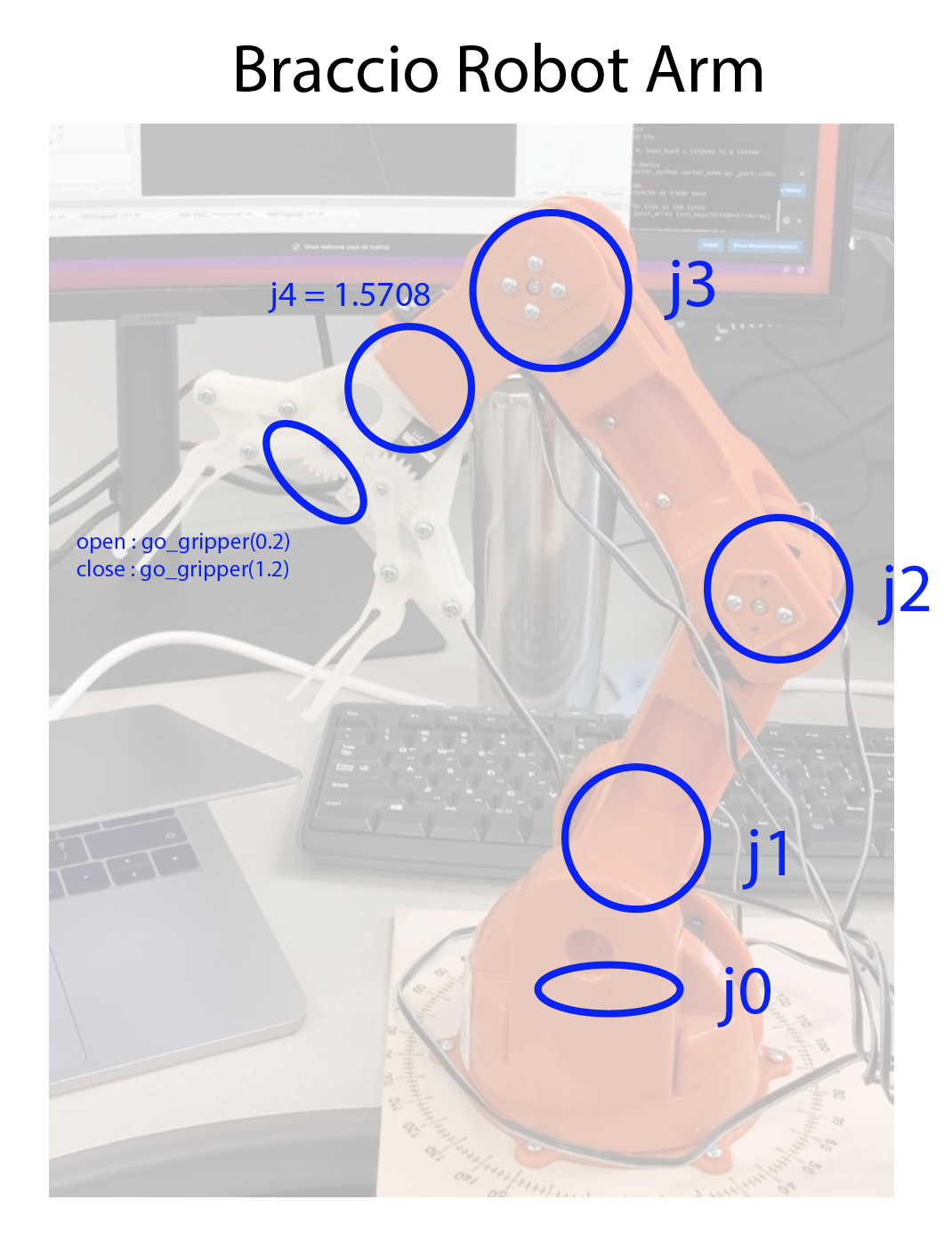
브라키오는 6축 로봇팔입니다.
로봇팔은 회전각 θ 를 제어하는 모터로 구성되고, joint 와 link 의 쌍으로 구성됩니다.
2. Braccio 로 pick and place 수행하기
2-1. 브라키오에서 ROS 를 사용할 수 있게 세팅하기

브라키오는 다음과 같이 아두이노 우노와 부착된 Shield 로 구성되어 있습니다.
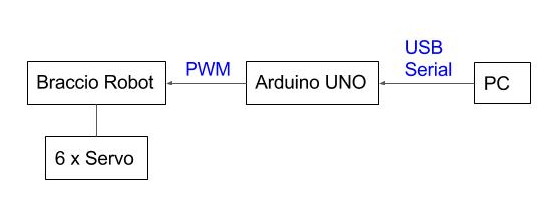
브라키오는 다음과 같이 아두이노와 쉴드에 부착되어 있습니다. 이 아두이노가 ROS 를 사용할 수 있게 하려면, 따로 설정을 해 주어야 합니다.
Setup 에 관해서는 이곳 을 참고해 주세요.
이후 braccio/braccio_ros.ino 파일을 아두이노에 업로드해주세요.
Error opening serial : could not open port /dev/ttyACM0 Permission denied 라는 에러가 떴다면
$ sudo chmod 666 /dev/ttyACM0를 입력하여 포트를 모든 사용자가 사용할 수 있도록 권한을 부여해 주세요.
2-2. 상자를 keyboard input 에 따라 옮기기
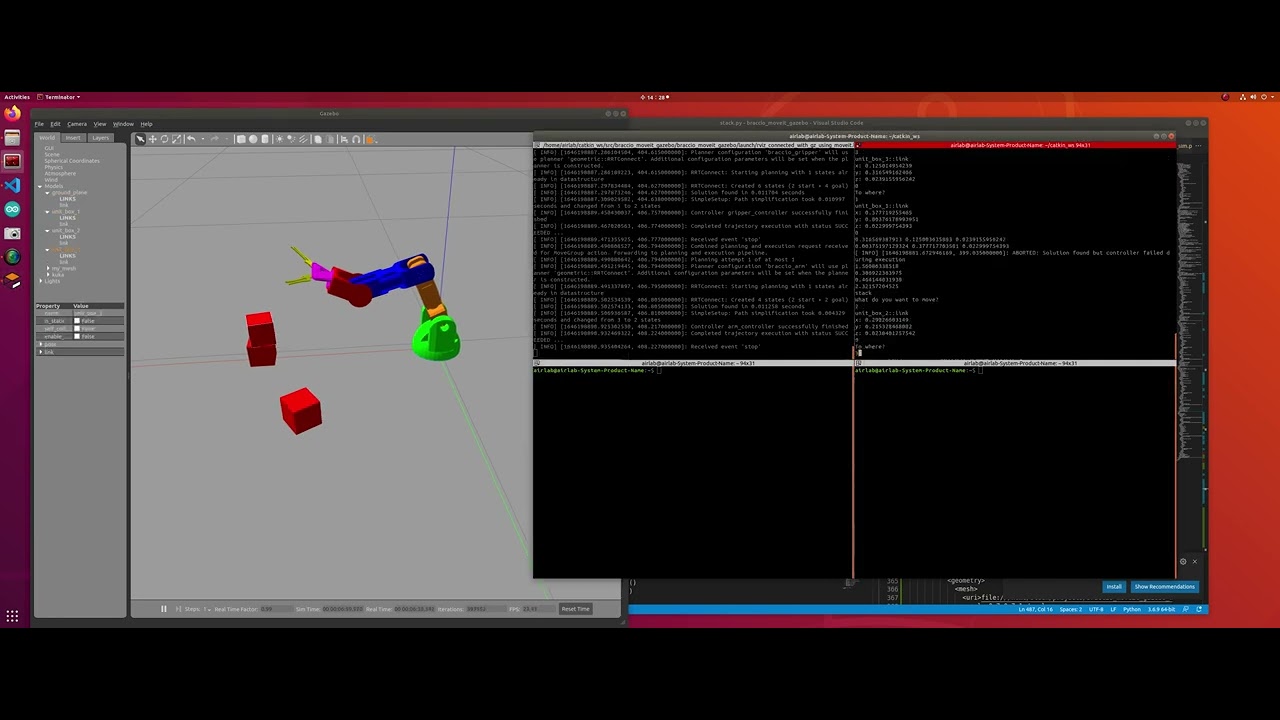
Gazebo
가제보는 가상 시뮬레이션 툴입니다.
URDF, SDF, Xacro 등의 XML 문서로 사용자가 원하는 로봇을 가상 시뮬레이션에 삽입한 후, 삽입된 로봇과 사용자가 작성한 프로그램이 메시지를 주고 받으며 동작하는 모습을 확인할 수 있습니다.
launch 파일을 살펴 보면,
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find braccio_moveit_gazebo)/worlds/123_box.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>이 프로젝트에서는 123_box.world 파일로서 world 를 생성한다는 것을 볼 수 있습니다.
이 world 는 사용자가 코드를 통해 임의로 장애물들을 생성하고, 이들의 inertia, 중력가속도 등을 조절할 수 있습니다.
world 파일 작성법에 관해서는 이곳을 참고해 주세요.
예를 들어 gravity 값을 0 0 0 으로 설정해준다면, 다음과 같은 움직임을 얻을 수 있습니다.
코드 설명
Libraries
import sys
import rospy
import moveit_commander
import time
from gazebo_msgs.msg import LinkStates, ModelState
from geometry_msgs.msg import Pose
from gazebo_msgs.srv import SetModelState
import numpy as np
import scipy.optimize
import cv2
import jsonmoveit_commander
moveit_commander 파이썬 패키지는 moveit 에서 제공하는 기능에 대한 wrapper 을 제공합니다.
모션 계획 (motion planning), 데카르트 경로 계산, 선택 및 배치에 대한 간단한 인터페이스를 사용할 수 있습니다.
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('braccio_xy_bb_target', anonymous=True)먼저 moveit commander 와 rospy 를 초기화합니다. rospy 초기화에서 ros 에 사용되는 노드의 이름을 입력합니다.
group_name = "braccio_arm"
self.move_group = moveit_commander.MoveGroupCommander(group_name)
self.gripper_group = moveit_commander.MoveGroupCommander("braccio_gripper")MoveGroupCommander 를 통해서 로봇의 모션을 생성할 수 있으며, 로봇을 움직이는 명령을 보낼 수 있습니다.
rospy.Subscriber
self.states_sub = rospy.Subscriber("/gazebo/link_states", LinkStates, self.linkstate_callback)/gazebo/link_states 를 subscribe 하여 link state 를 받아옵니다.
ModelState
reset_link 함수를 통해 모델의 관절 각도를 직접 조정할 수 있습니다.
이때 말하는 모델은 이 프로젝트의 경우 '빨간 박스' 입니다.
즉, 이 함수를 통해 빨간 박스의 위치를 조정할 수 있습니다.
def reset_link(self, name, x, y, z):
state_msg = ModelState()
state_msg.model_name = name
state_msg.pose.position.x = float(x)
state_msg.pose.position.y = float(y)
state_msg.pose.position.z = float(z)
state_msg.pose.orientation.x = 0
state_msg.pose.orientation.y = 0
state_msg.pose.orientation.z = 0
state_msg.pose.orientation.w = 0
rospy.wait_for_service('/gazebo/set_model_state')
try:
set_state = rospy.ServiceProxy('/gazebo/set_model_state', SetModelState)
resp = set_state( state_msg )
except rospy.ServiceException, e:
print "Service call failed: %s" % eWhat is rospy.ServiceProxy?
rospy.ServiceProxy(name, service_class, persistent=True) Creates a proxy to call a service and enable persistent connections.
여기서 프록시 (Proxy) 란?
프록시란 '대리' 라는 의미로, 주로 직접 통신할 수 없는 두 점 사이에서 통신을 할 경우 그 사이에서 중계기로서 대리로 통신을 수행하는 기능을 가리켜 '프록시' , 그 중계 기능을 하는 것을 프록시 서버라고 부릅니다.
def reset_target_position(self):
"""reset block and bowl"""
print 'reset block x='
x = raw_input()
print 'reset block y='
y = raw_input()
print 'reset block z='
z = raw_input()
self.reset_link('unit_box_0', x, y, z)
self.reset_link('my_mesh', -0.15, -0.325, 0)reset_target_position 함수를 통해 target 인 unit_box_0 의 position 을 키보드 입력을 통해 임의로 조정할 수 있게 됩니다.
Position
get_link_position_box 함수를 통해서 box 의 x,y,z, 위치를 알 수 있습니다.
def get_link_position_box(self, link_names):
x = 0
y = 0
z = 0
n = 0
for l in link_names:
ind = self.linkstate_data.name.index(l)
res = self.linkstate_data.pose[ind].position
print(l)
print(res)
print(n)
x += res.x
y += res.y
z += res.z
n += 1
return x/n, y/n, z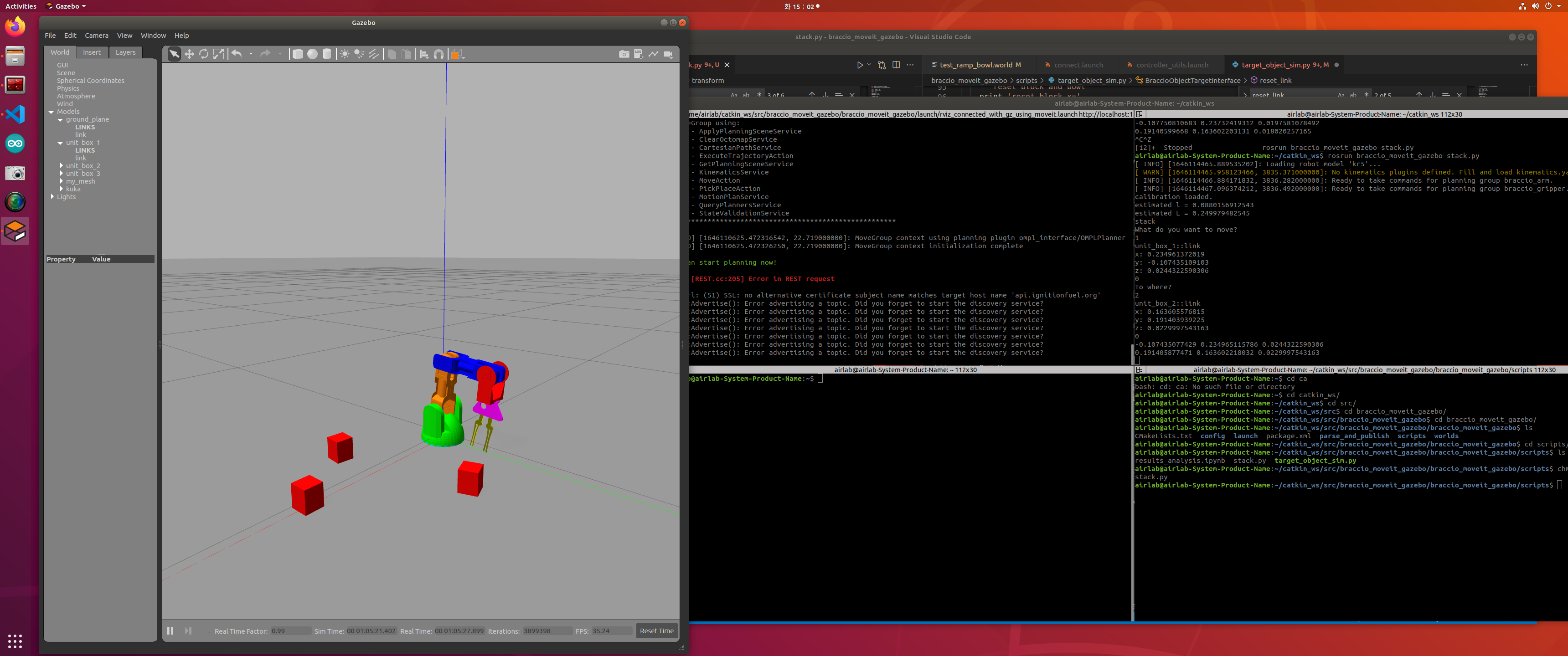

다음과 같이 position 이 표시되는 것을 볼 수 있습니다.
Robot Arm Control
go_to_j 함수
이 함수는 joint_goal 배열 내에 원하는 각도값을 각각 넣어주는 함수입니다.
def go_to_j(self, j0=None, j1=None, j2=None, j3=None):
joint_goal = self.move_group.get_current_joint_values()
if j0 is not None:
joint_goal[0]=j0
if j1 is not None:
joint_goal[1]=j1
if j2 is not None:
joint_goal[2]=j2
if j3 is not None:
joint_goal[3]=j3
self.go_to_joint(joint_goal)joint_goal 이라는 배열 속에 순서대로 j0, j1, j2, j3 관절 각도값이 들어 있습니다.
이때 주의할 것은 Arm3Link 가 3축에 대한 역기구학 솔루션을 제공한다는 점입니다.
이 프로젝트에서 j4 관절은 움직일 필요가 없기 때문에, 지면과 수평하도록 설정해놓고 이후에는 고려하지 않습니다.
또한 j0 의 경우 물체가 있는 방향으로 움직입니다.
따라서 역기구학에서는 j1, j2, j3 관절에 대한 움직임만을 계산합니다.
Arm3Link
따라서 이번 braccio 프로젝트에서는, 6축의 일부를 고정함으로써 3축 inverse kinematics 코드를 적용시킬 수 있었습니다.
원본 코드는 이곳입니다.
kinematics 에 관한 추가적인 내용은 Kinematics Matlab simulation을 참고해 주세요.
go_to_joint 함수
def go_to_joint(self, joint_targets):
joint_goal = self.move_group.get_current_joint_values()
joint_goal[0] = joint_targets[0]
joint_goal[1] = joint_targets[1]
joint_goal[2] = joint_targets[2]
joint_goal[3] = joint_targets[3]
joint_goal[4] = 1.5708
ret = self.move_group.go(joint_goal, wait=True)
self.move_group.stop()Gripper
def gripper_close(self):
self.go_gripper(1.2)
def gripper_open(self):
self.go_gripper(0.2)
def gripper_middle(self):
self.go_gripper(0.5)
def go_gripper(self, val):
joint_goal = self.gripper_group.get_current_joint_values()
joint_goal[0] = val
joint_goal[1] = val
self.gripper_group.go(joint_goal, wait=True)
self.gripper_group.stop()다음과 같은 함수들로 그리퍼를 컨트롤할 수 있습니다.
