장비 사용 매뉴얼
1.Velodyne 3d lidar 세팅하기

SettingVelodyne Puck VLP16 을 구동하려면 패키지 구성상품 말고 추가로 110V 변압기 (돼지코) 와 ethernet 젠더가 필요합니다. 관련 내용은 벨로다인 세팅 을 참고하세요. ezgif com-gif-maker (5)ezgif com-gif-m
2.Realsense 파이썬으로 사용하기
Intel Realsense Githubpyrealsense2 패키지는 Realsense 카메라를 Python 으로 제어할 수 있는 패키지입니다. 본 프로젝트에서는 직접 데이터를 다루기 위해 SDK 가 아닌, wrapper 를 사용합니다. 'pip install pyr
3.linux 에서 Azure Kinect 사용하기
kinectdepth camera streamingezgif com-gif-makerezgif com-gif-maker (2)o3d.geometry.PointCloud.create_from_rgbd_image() 와 o3d.visualization.draw_geomet
4.6dof Robot Arm Research
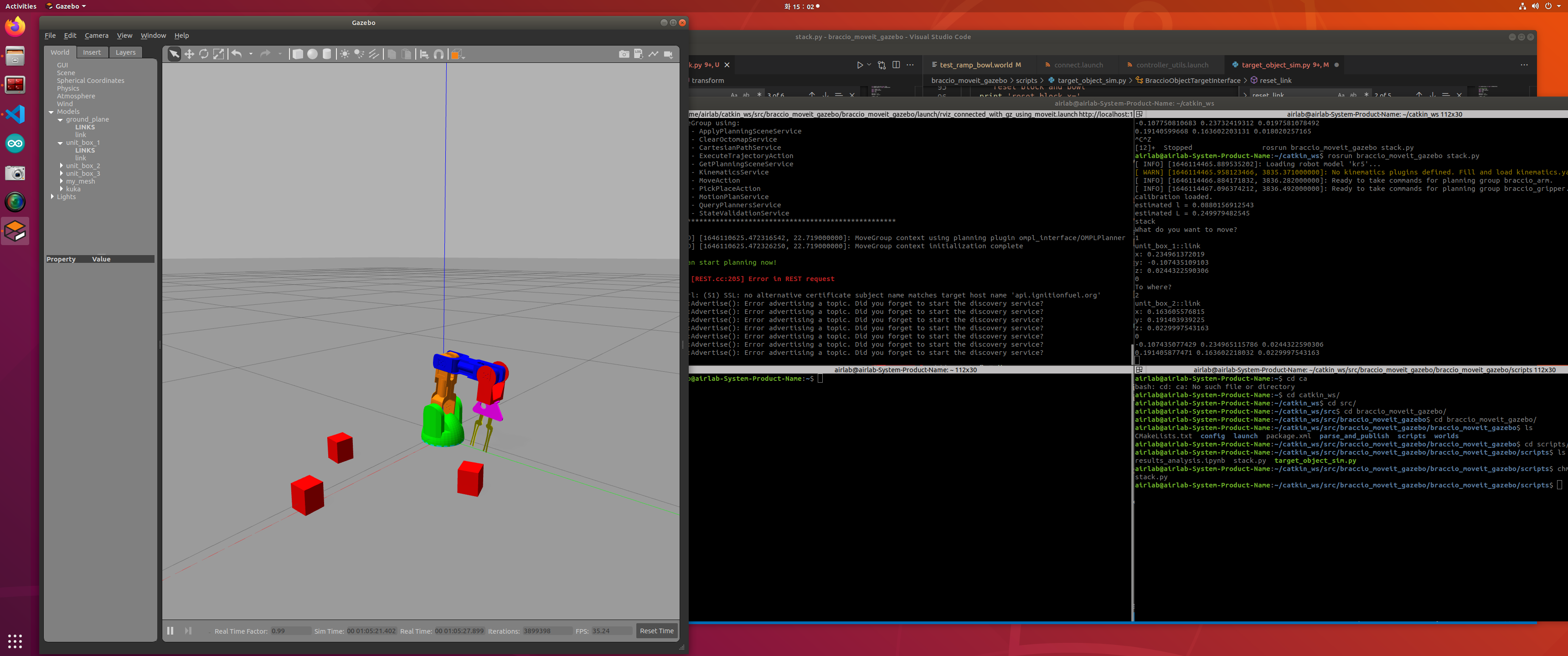
저는 경희대학교 AIR LAB 소속 학부연구생 박지원이며, 이하 내용은 2022 1월~2월간 로봇팔에 관해 리서치한 내용을 토대로 작성한 것입니다. 로봇팔에 대한 전반적인 내용과, Braccio 로봇팔로 수행하는 pick and place 를 다룹니다. 박스를 쌓는 로
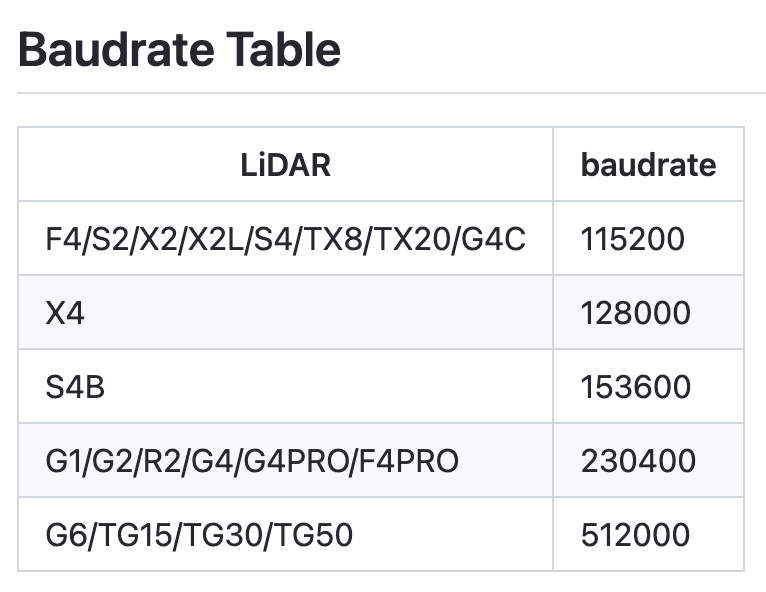
5.YDLidar Mac 에서 사용하기
대회에서 사용된 라이다는 YDLidar 이다. PyLidar 패키지 를 사용했다. YDLidar User Manual라이다를 연결하고 ls /dev 로 어느 포트에 있는지 확인한다. 내 컴퓨터의 경우 tty.usbserial-0001 에 있다. 끼웠다 뺐다 해보면서 확
6.Raspberry Pi 라즈베리파이로 모터 돌리기
다음과 같이 연결한다. 참조하고 있는 Drive Class 는 다음과 같다. 라즈베리파이에는 GPIO (General Purpose Input / Output : 다용도 입출력) 핀이 있다. 7(https://user-images.githubuserconten
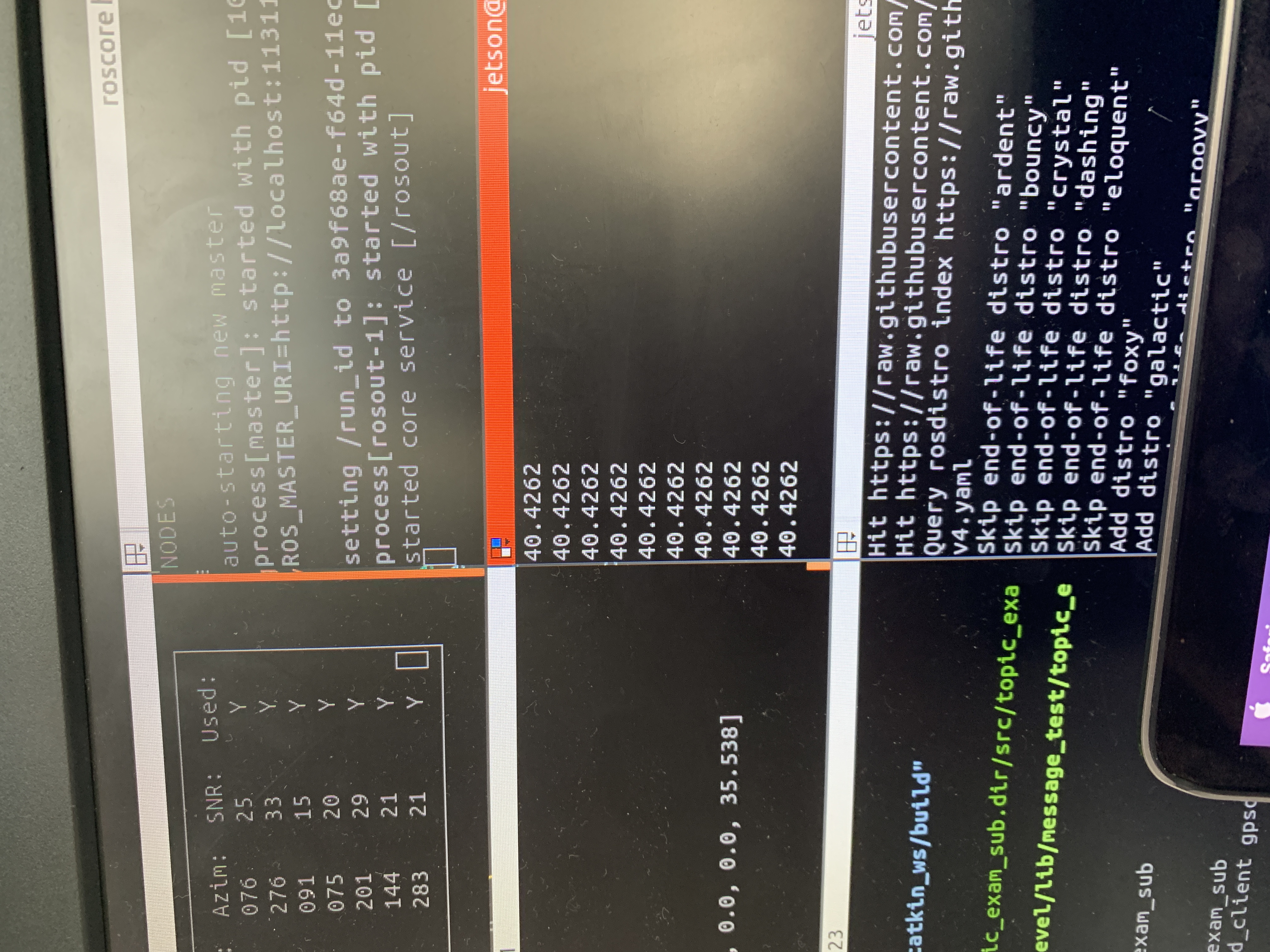
7.YDLidar 을 ROS 에서 사용하기
Youtube 시연세팅은 링크 참고하기 catkin_ws/src 폴더 내에 깃 레포지토리를 복사한다. catkin_make 를 실행한다. 라이다 모델명에 맞는 launch 파일을 수정한다. ydlidar 을 ttyUSB0 로 바꾸고laser_scan 부분을 base_s
8.ROS 에서 GPS 사용하기
BU-353S4이 패키지는 /fix 형태로 위도, 경도 메시지를 전송한다. 자세한 사항은 NavSatFix Documentation을 참고. 그리고 ROS 패키지를 만들어서 CMakeList.txt. 를 수정하고 src 폴더 내부에 소스코드를 만든 후 catkin_ma