2021_2 로봇 프로그래밍 중간고사 대체 과제
2021.11.26
2019103970 박지원
github
소스코드를 Github 에 업로드 해 놓았습니다.
1. Package Manual
완벽하게 세 번째 미션을 수행하지는 못 하여 두 가지 버전으로 제출합니다.
1. uvc_camera 에서 영상을 받아오지만 optical flow 가 조금 부정확한 코드
실행 방법
$ rosrun uvc_camera uvc_camera_node
$ rosrun image_transport_ws optical_flow_car2. web cam 에서 영상을 받아오지만 optical flow 와 gazebo 가 완벽하게 작동하는 코드
실행 방법
(uvc_camera 가 작동하고 있지 않은 상태에서)
$ rosrun image_transport_ws optical_flow2. Making Process
1. Mission 1
Display image in real-time using imshow
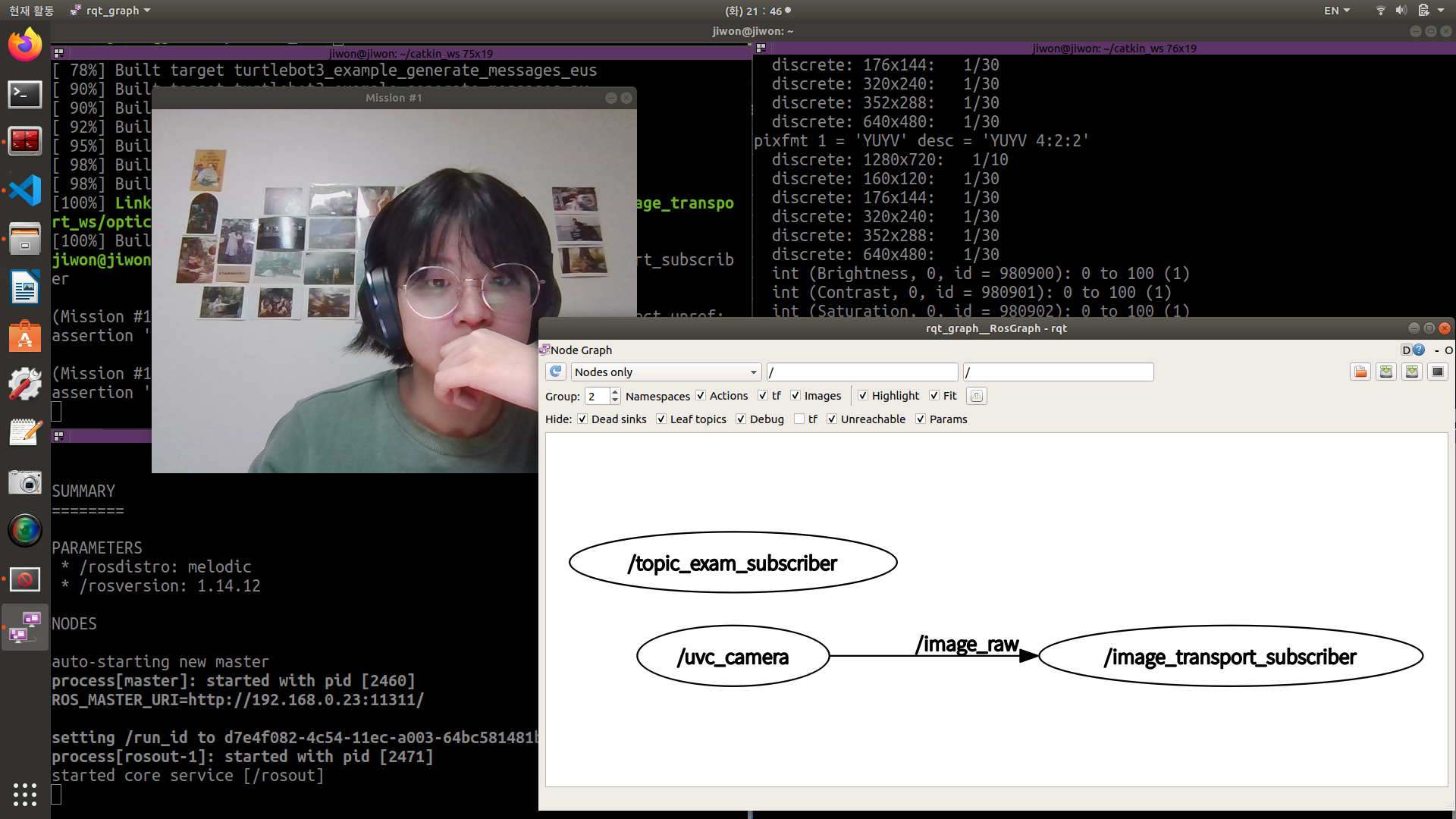
uvc_camera 에서 publish 하는 image_raw 를 subscribe 하여 imshow 로 보여주는 코드입니다.
Node Graph 를 통해 uvc_camera 에서 image_raw 를 받아오고 있다는 것을 볼 수 있습니다.
실행 코드
$ rosrun uvc_camera uvc_camera_node
$ rosrun image_transport_ws image_publisher소스 코드
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <image_transport/image_transport.h>
#include <opencv2/highgui/highgui.hpp>
#include <cv_bridge/cv_bridge.h>
void imageCallback(const sensor_msgs::Image::ConstPtr &msg){
cv_bridge::CvImagePtr cv_ptr;
try{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch (cv_bridge::Exception& e){
ROS_ERROR("cannot convert");
}
cv::imshow("Mission #1", cv_ptr->image);
cv::waitKey(1);
}
int main(int argc, char **argv) {
ros::init(argc, argv, "image_transport_subscriber");
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
image_transport::Subscriber sub = it.subscribe("/image_raw", 1,
imageCallback);
return 0;
}2. Mission 2
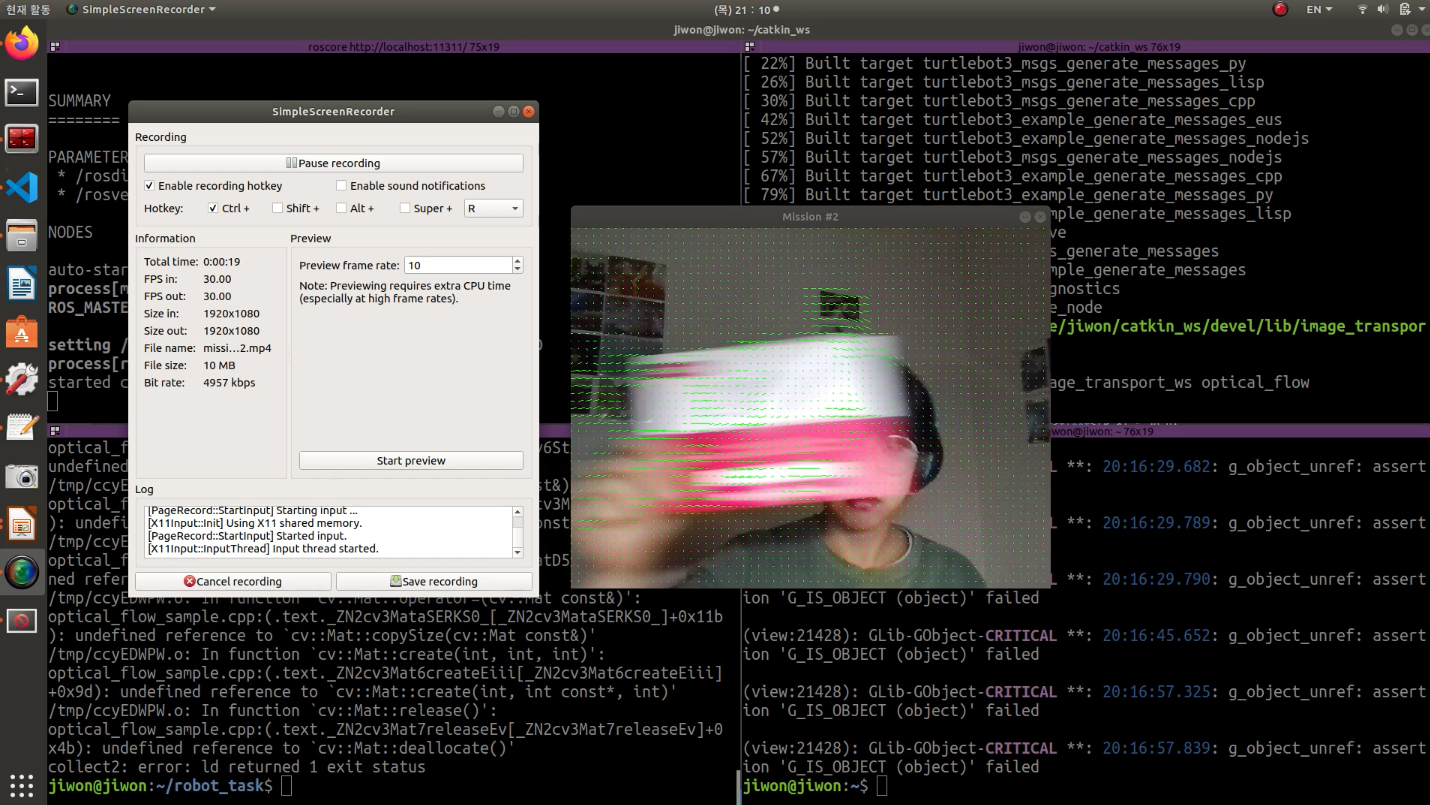
Display input image with motion vectors
이때 uvc_camera 를 통해 받아온 영상은 optical flow 가 조금 미흡하게 시행되었습니다.
uvc_camera 로 시행한 mission#2 동영상
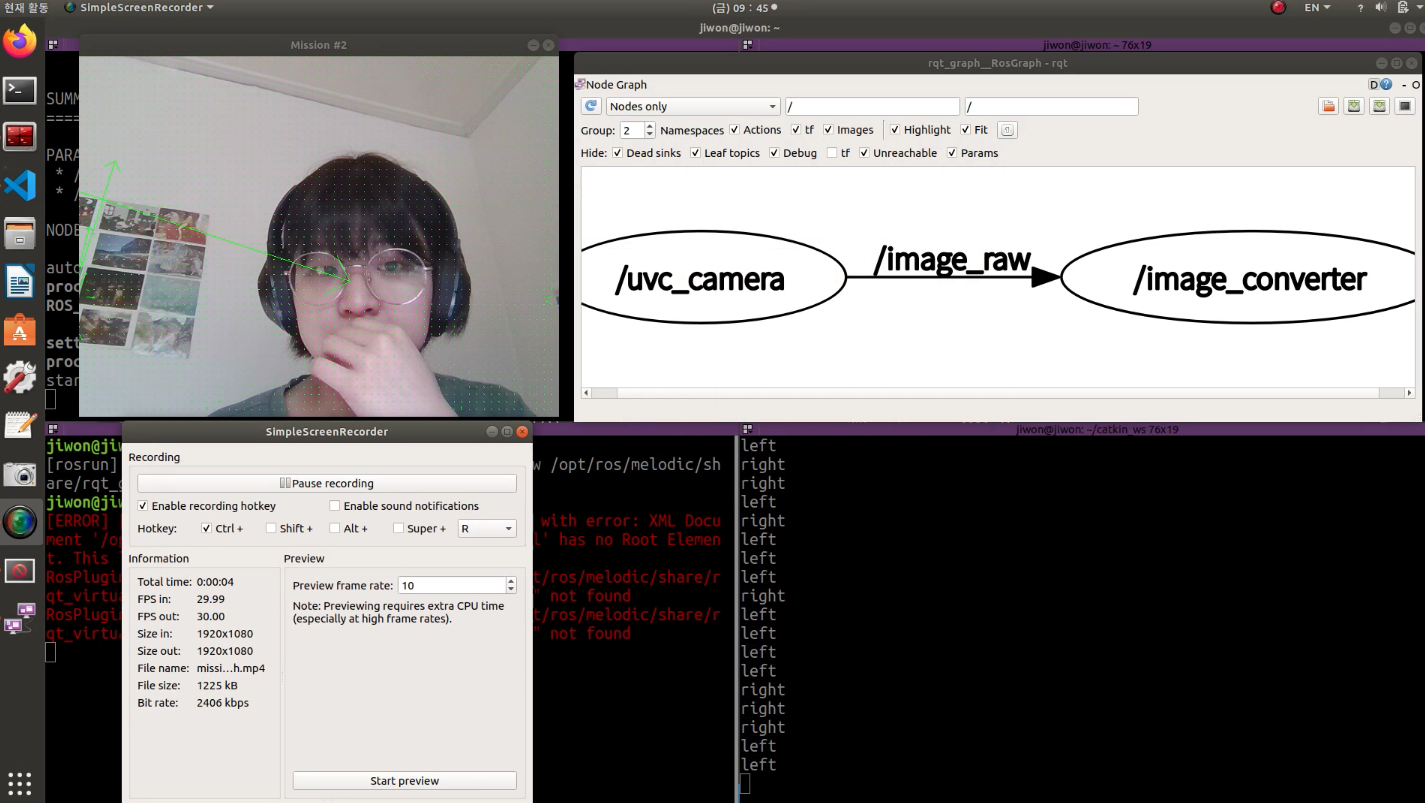
cv::VideoCapture vc(0) - 웹캠 - 으로 받아온 영상으로 한 optical flow 는 잘 작동하여 아래 gazebo 미션은 웹캠으로 수행하였습니다.
3. Mission 3
Get Major direction
trial #1
물체 움직임의 평균적인 방향을 추정하기 위해, 처음에는 다음과 같은 방법을 사용했습니다.
if((ang >= 0 && ang < pi/4) || (ang >= (pi/4)*7 && ang < pi*2)){
number[0] += 1;
}
else if(ang >= pi/4 && ang < (pi/4)*3){
number[2] += 1;
}
else if(ang >= (pi/4)*3 && ang < (pi/4)*5){
number[1] += 1;
}
else if(ang >= (pi/4)*5 && ang < (pi/4)*7){
number[3] += 1;
}
}
}
int max = number[0];
for (int i=0;i<4;i++){
if(max<number[i]){
max = number[i];
}
}
if (max == number[0]){
cout << "left" << endl;
result = 0;
}
else if (max == number[1]){
cout << "right" << endl;
result = 1;
}
else if (max == number[2]){
cout << "down" << endl;
result = 2;
}
else if (max == number[3]){
cout << "up" << endl;
result = 3;
}
switch (result)
{
case 0:
angular_ = -10.0;
break;
case 1:
angular_ = 10.0;
break;
case 2:
linear_ = 10.0;
break;
case 3:
linear_ = -10.0;
break;
}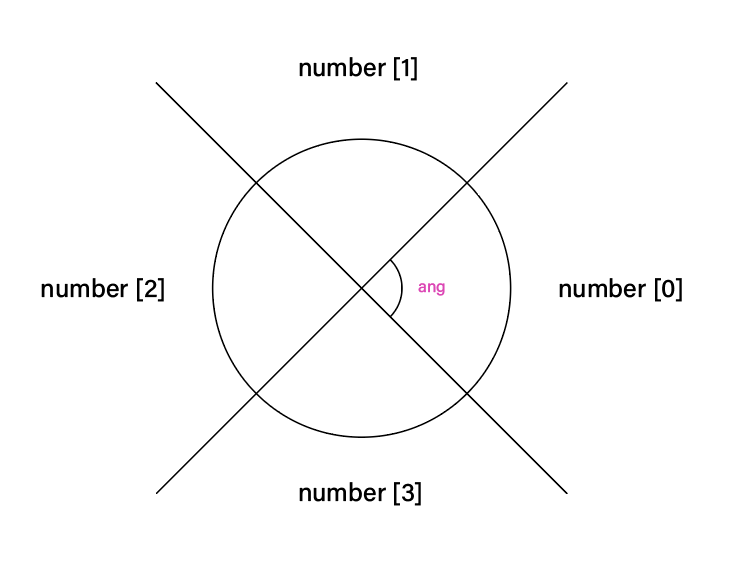
ang 변수에 들어있는 벡터의 각도에 따라 number 라는 행렬의 요소를 1씩 더했습니다.
이후 number 행렬의 가장 큰 값을 검사해 up / down / right / left 를 판단했습니다.
불충분한 알고리즘으로 인해 진행값이 자주 바뀌는 터틀봇 영상
하지만 동영상에서 보이듯이, 벡터의 크기를 고려하지 않아 값이 부정확하게 나왔습니다. 또한 결과값이 일정하지 않아 터틀봇 또한 진동하는 듯한 모습을 볼 수 있었습니다.
trial #2
number[0] += 100*m이와 같이 벡터의 크기를 고려해 주니, 이전보다는 일관되게 값이 나오는 것을 확인할 수 있었습니다.
Send message to Gazebo
turtlebot_teleop 소스코드를 살펴보면, TurtlebotTeleop 클래스의 keyLoop() 함수에서 switch 문에 따라 angular, linear_ 값을 결정하고, 이를 publish 함수에서 publish 한다는 것을 알 수 있습니다.
따라서 저는 전체 이미지 처리 코드를 keyLoop 함수에 넣어서 결과값을 cmd_vel / geometry_msgs / twist 형태로 publish 하도록 하였습니다.
3. Further Development (Application Example)
과제를 통해 ROS 를 이용하면 달리 통신을 따로 구축하지 않아도 같은 MASTER 에 접속한 기기끼리는 쉽게 메시지를 주고 받을 수 있다는 것을 알게 되었습니다.
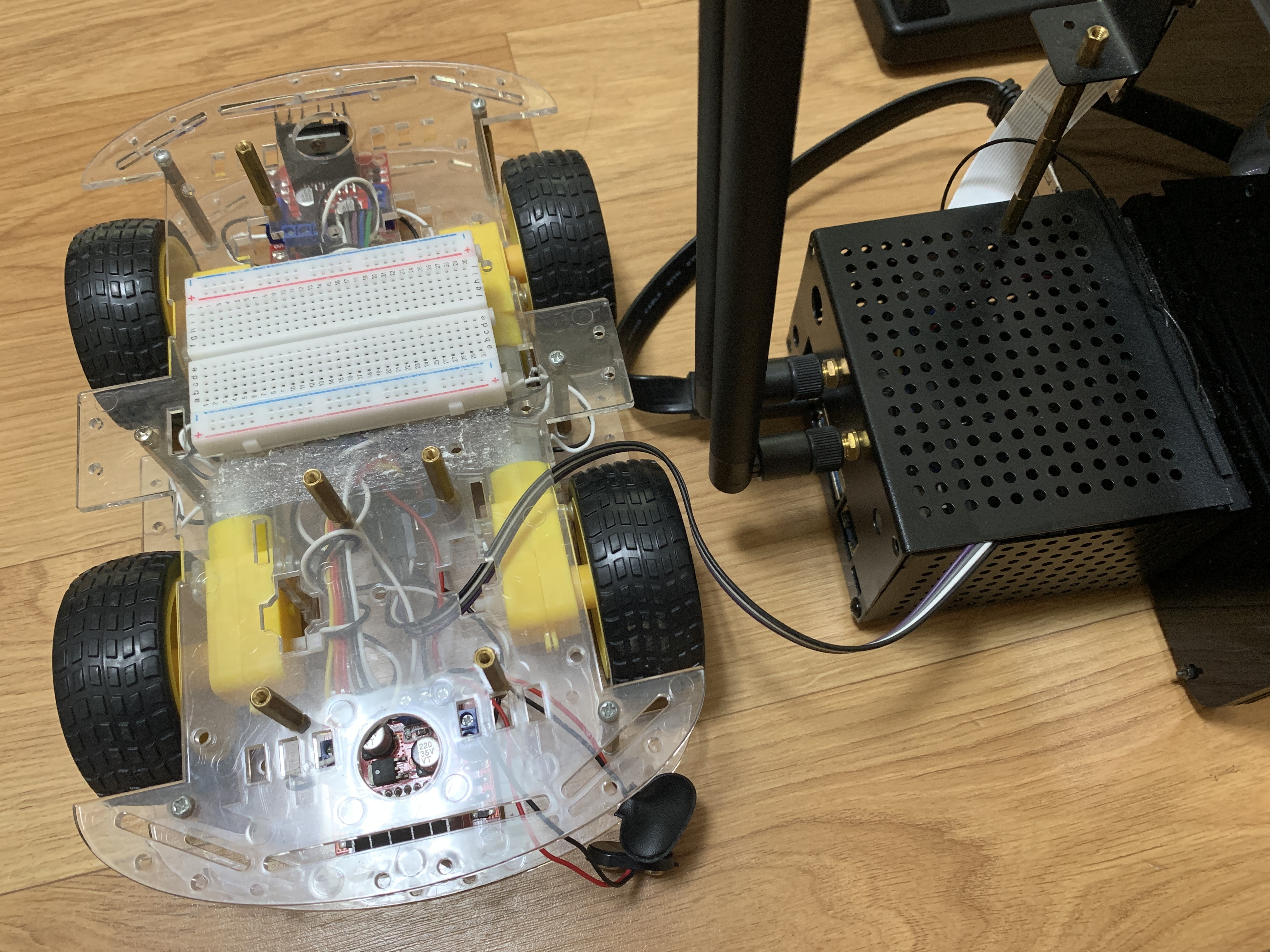
이러한 큰 이점을 실제로 경험해보고자, Gazebo 가 아니라 실제 미니 자동차를 만들어서 메시지를 날려 동작시켜 보았습니다.
결과 동영상

Optical Flow 로 나온 결과값에 따라서 바퀴가 전,후,좌,우로 동작하는 것을 볼 수 있었습니다.
사용한 기기
- Jetson Nano 4GB
- L298N motor driver
- PCA9685
diagram
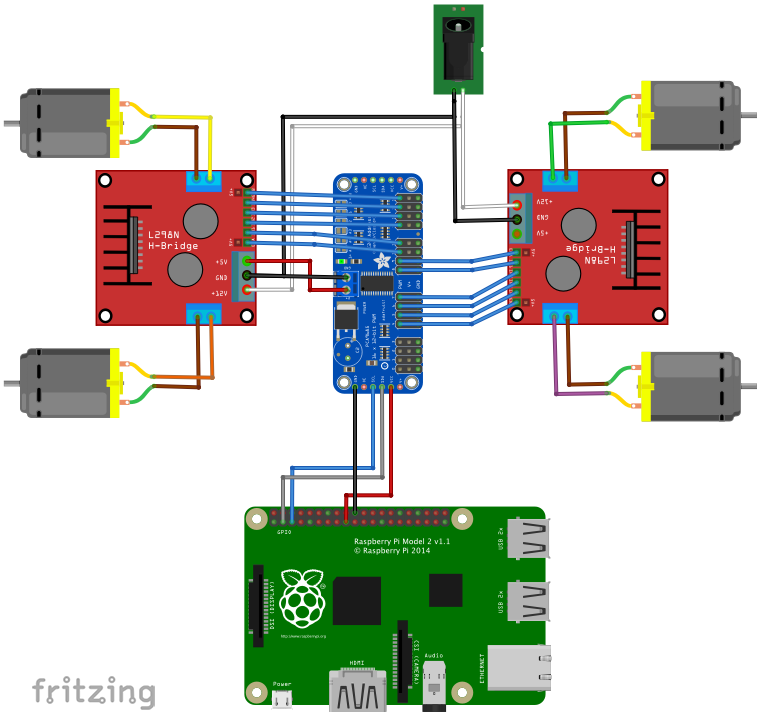
이 구성도에서 라즈베리파이만 젯슨 나노로 변경하여 사용했습니다.
젯슨 나노에 기존과 똑같이 ROS 를 세팅하고, 수업 때 실습한 topic_exam 에 기반한 패키지를 만들었습니다.
이때 slave 인 jetson nano 를 ROS_MASTER 에 연결해 주기 위해서,
~/.bashrc 를 다음과 같이 수정해 주었습니다.
master 컴퓨터의 .bashrc
export ROS_IP = 192.168.0.23
export ROS_MASTER_URI = http://192.168.0.23:11311
export ROS_HOSTNAME = $ROS_IPslave 컴퓨터의 .bashrc
export ROS_MASTER_URI = http://192.168.0.23:11311
export ROS_HOSTNAME = 192.168.0.73다음과 같이 Master 에 잘 연결된 것을 볼 수 있습니다.
