ROS 로봇 프로그래밍
1.ROS SLAM

경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 내용입니다.왼쪽 사진을 획득하고 오른쪽 사진을 획득하기 위해서 내가 얼마나 움직였는지 (pose: 움직임과 회전) 알기 위해서는 1. global 한 맵과 2. 카메라에 대한 intrinsic
2.ROS 로봇 프로그래밍_전체적으로

게임할 때 방을 만들면 그 안에서만 사람들이 대화할 수 있는 것 처럼, 노드들이 어디까지 메시지를 주고 받을 수 있는가- 하는 Boundary 를 관리하는 것이 서버입니다.내 서버에 올라온 애들끼리만 대화하는 것이고, ROS Master 은 그 서버입니다. $rosco
3.Homogeneous Coordinate
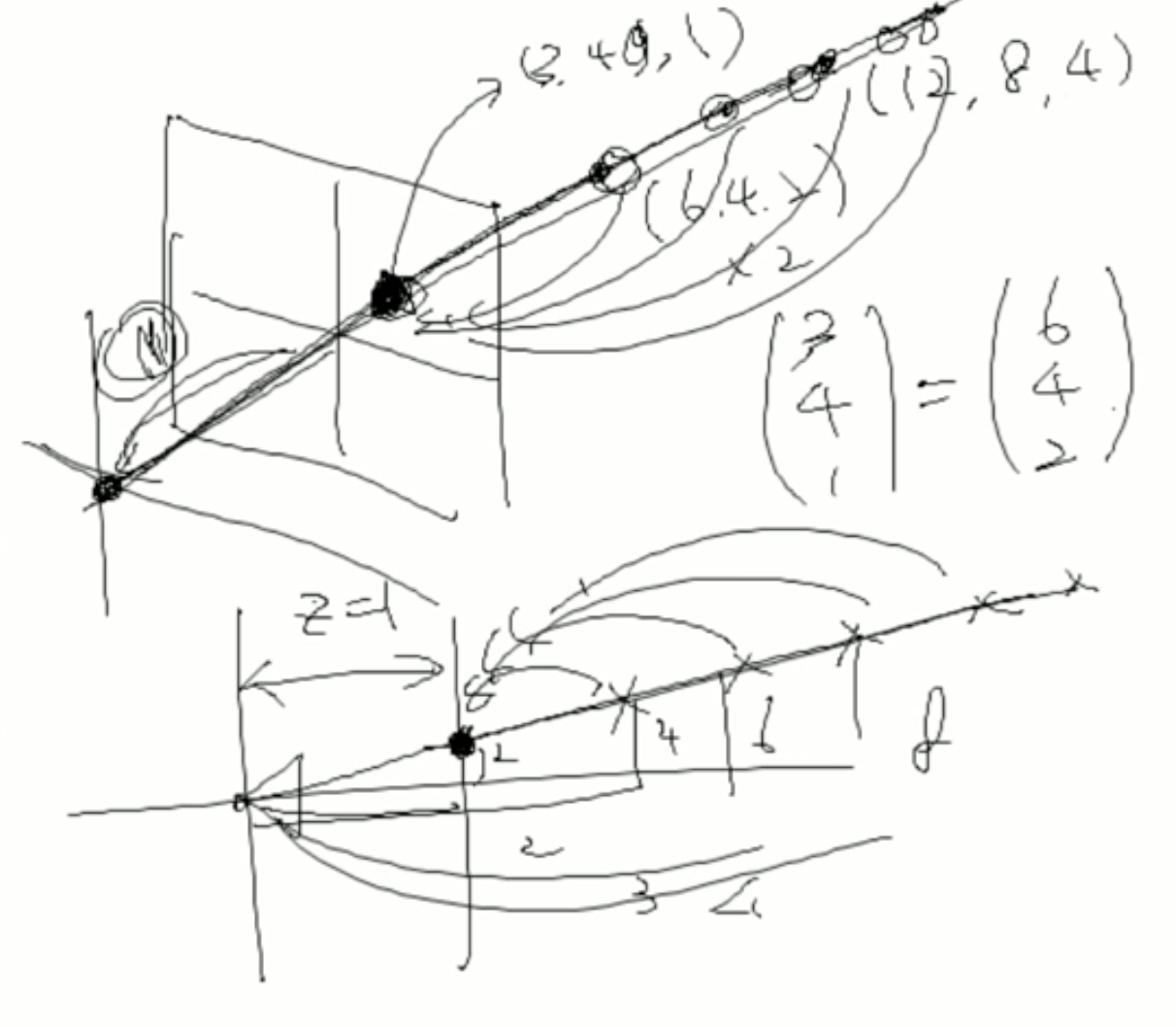
경희대학교 황효석 교수님의 2021-1학기 로봇 프로그래밍 수업을 듣고 공부한 것입니다.Homogeneous Coordinate (Homogeneous 좌표) 는 주로 컴퓨터 비전이나 3D 그래픽스에서 많이 쓰입니다. 수학에서는 유클리디안 좌표계를 쓰지만, 영상이나 S
4.ROS_Message 실습
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 요약한 것입니다.publisher : 스탠다드 message (따로 정의 하지 않고 기존에 정의되어 있는 데이터 타입을 이용)topic_exam_pubsubscriber : 그 정보를 받아 화면에 출력
5.ROS_Service
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다. > 두 개의 숫자를 request 로 던져 주면 그 숫자의 합을 response 로 돌려 주는 예제를 만들어 보자. 1. Make Package go to workspace ma
6.Octave for SLAM
옥타브는 c++ 표준 라이브러리 함수를 기반으로 만들어진 수치 해석용 소프트웨어이다. 맥에서는 만 하면 된다. 이후에 gui 를 사용할 때는 하면이렇게 gui 를 사용할 수 있다.
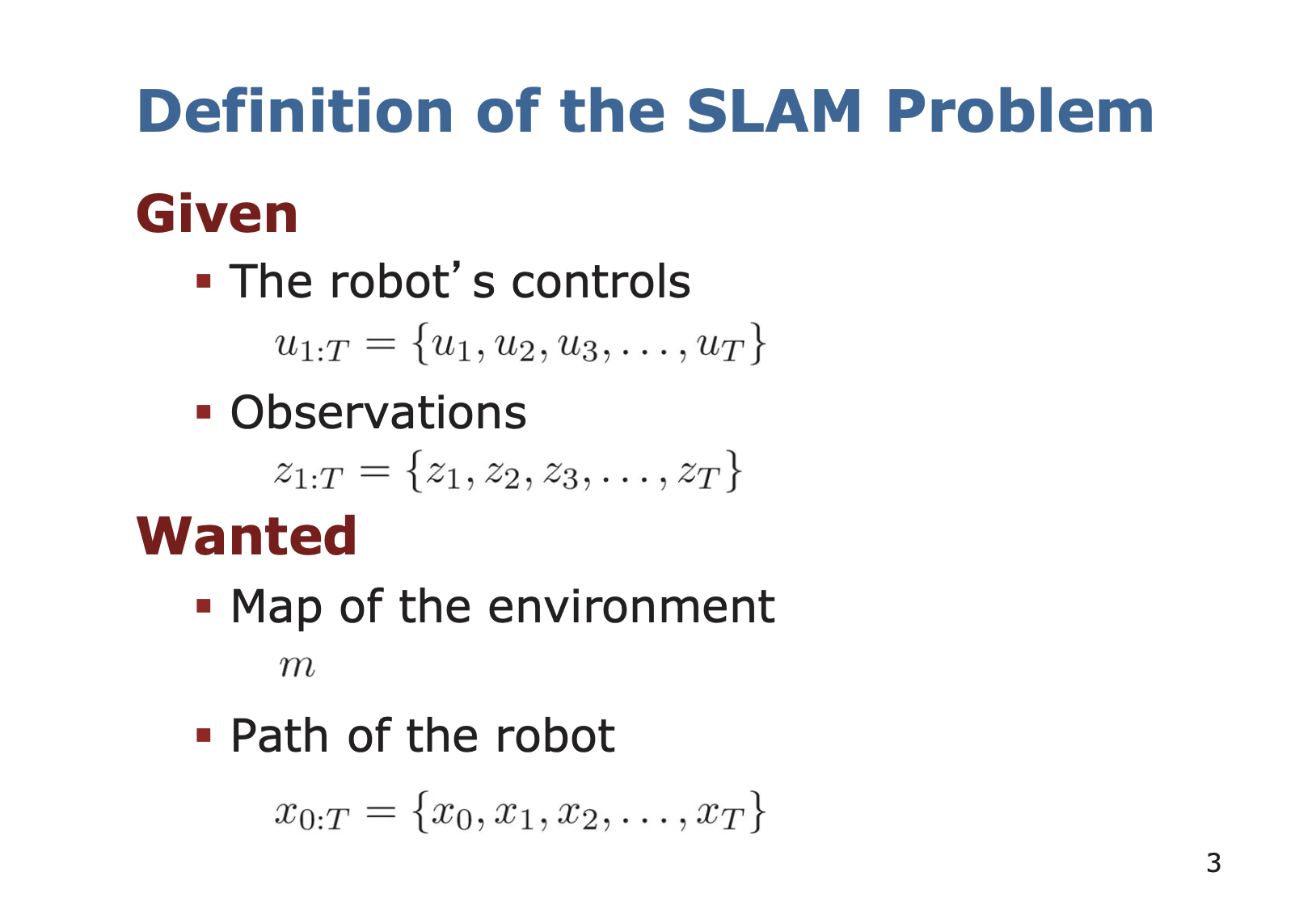
7.ROS_Motion and Sensor Models
경희대학교 황효석 교수님의 2021-2 로봇프로그래밍 수업을 듣고 공부한 내용입니다.estimate the state x of a system given observations z and controls ubelief현재 t 라는 시간이 있을 때 내가 가지고 있는 것은
8.ROS_Tool: commands, RQT, Camera
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다.ROS 는 vscode 등에서 하는 프로그래밍과는 다르게, 현재 ROS master 에 실행되는 시스템 (node 들) 이 어떻게 돌아가고 있는지 정보를 얻고 시각화하는 일이 반드시 필
9.ROS_Gazebo
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다.Rviz 가 Viewer 라면, Gazebo 는 simulator 이다. 이거를 command 창에서 실행하거나 ~/.bashrc 에 적어놓는다.
10.중간보고서
1. Package Manual 2. Further Development (Application Example) 3. Making Process 1. Mission 1 > Display image in real-time using imshow 2. Missio
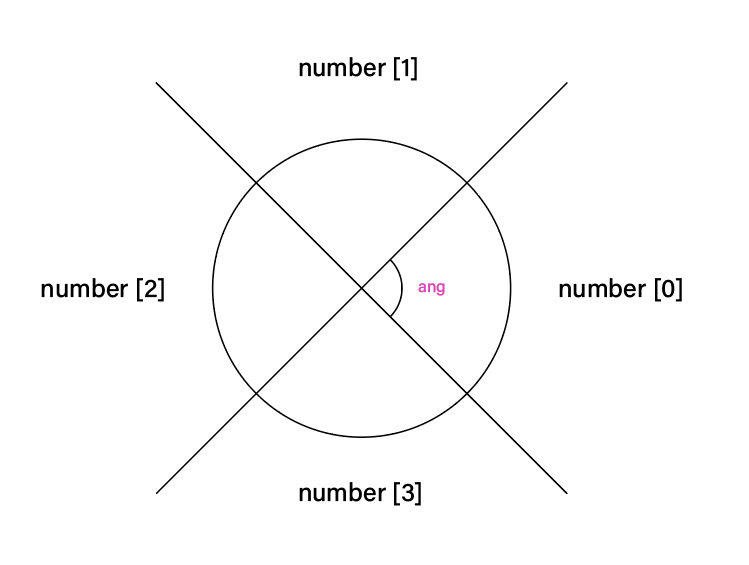
11.Visual Operator for TurtleSim 제작
중간 대체 과제임 . turtlebot 을 움직이게 하기 위해서는 어떤 topic 을 publish 해야 한다. (topic : linear, angular velocity) 패키지 안에는 xml 이나 CMakeList 같은 파일이 있어야 하지만 소스파일은 하나만
12.SLAM_Kalman Filter
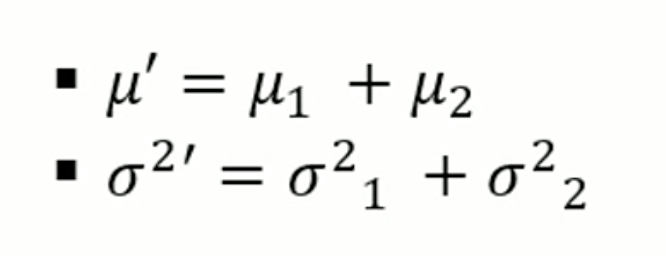
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다.칼만 필터는 Bayes Filter 의 일종이다. Estimator for the linear Gaussian Case. Optimal solution for linear models
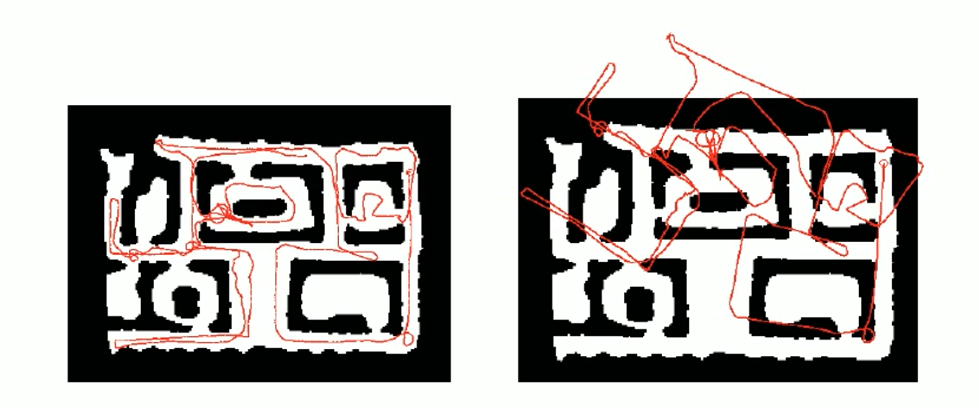
13.FastSLAM_개념과 실습
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다.FastSLAM은 Particle Filter를 기반으로 동작합니다. FastSLAM은 랜드마크의 수가 수천개 이상 되었을 때 EKF-SLAM과 비교하여 장점이 있습니다. EKF-SLA
14.SLAM_Extended Kalman Filter

경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다. Kalam Filter 칼만 필터는 노이즈, 센서의 정확도 등 확률 분포를 가우시안으로 표현한 것이다. 가우시안은 mean 과 distribution 값만 있으면 확률 분포를 알
15.SLAM_EKF SLAM
경희대학교 황효석 교수님의 2021-2 로봇 프로그래밍 수업을 듣고 공부한 것입니다. Map 로봇의 map 이란 landmark 들의 집합이다. Filter Cycle State Prediction Measurement Prediction Measurement
16.Gazebo World Plugin
1. 용어 Gazebo 에서 sdf 파일, urdf 파일 및 xacro 파일의 차이점 sdf, urdf, xacro 파일은 모두 모델 파일이다. xacro 파일은 urdf 파일의 개선된 버전이다. xacro 파일은 Gazebo 시뮬레이터에 표시할 수 있으며 urdf