경희대학교 황효석 교수님의 2021-2 로봇프로그래밍 수업을 듣고 공부한 내용입니다.
state estimation
estimate the state x of a system given observations z and controls u
belief
현재 t 라는 시간이 있을 때
내가 가지고 있는 것은 1부터 t까지의 measurement 와 u 값 (robot 의 state) 일 때
x값.
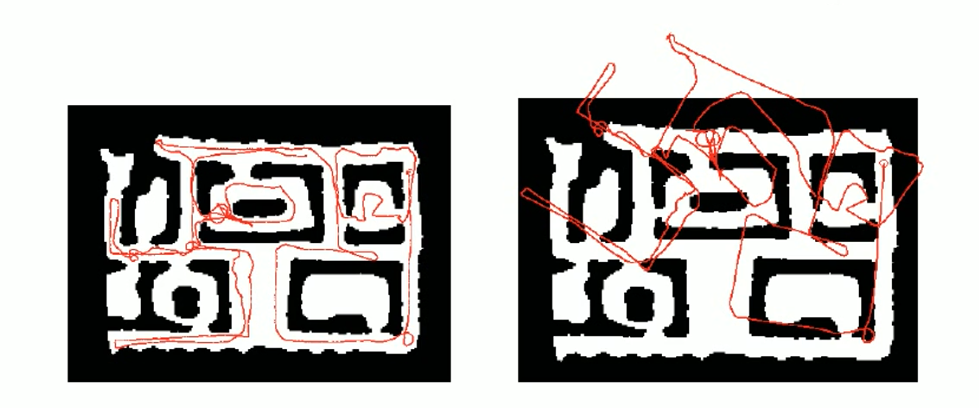
(오차 누적의 예시)
Typical Motion Models
- Odometry-based
주행 경로 기록
실제로 바퀴가 얼마나 굴렀는지 측정하는 것.
모터 인코더를 이용해서 하드웨어적으로 구현되어 있음. - velocity-based
실제로 내가 얼만큼 갔는지 측정할 수 없을 때, 속도를 기반으로 해서 모델을 만드는 방법.
속도는 IMU 나 엑셀로미터 (가속도 측정계) 등을 이용하여 측정.
모터 인코더
바퀴에 조도 센서를 달아서 흰-검 변환을 카운트.
