
지난 1편 포스팅 [ROS] 커스텀 메시지(custom msg) 만들기(1)에 이어 오늘은 2편으로 '배열(리스트) 자료형을 포함한' 커스텀 메시지를 만들어볼 것이다.
💬 배열을 포함한 메시지
가끔 표준 메시지형을 보다가 자료형 뒤에 []이 붙은 것을 확인할 수 있는데, 그것이 배열형이라는 의미이다. float32[]라면 float32형의 숫자 여러 개가 배열로 전달된다는 뜻이다.
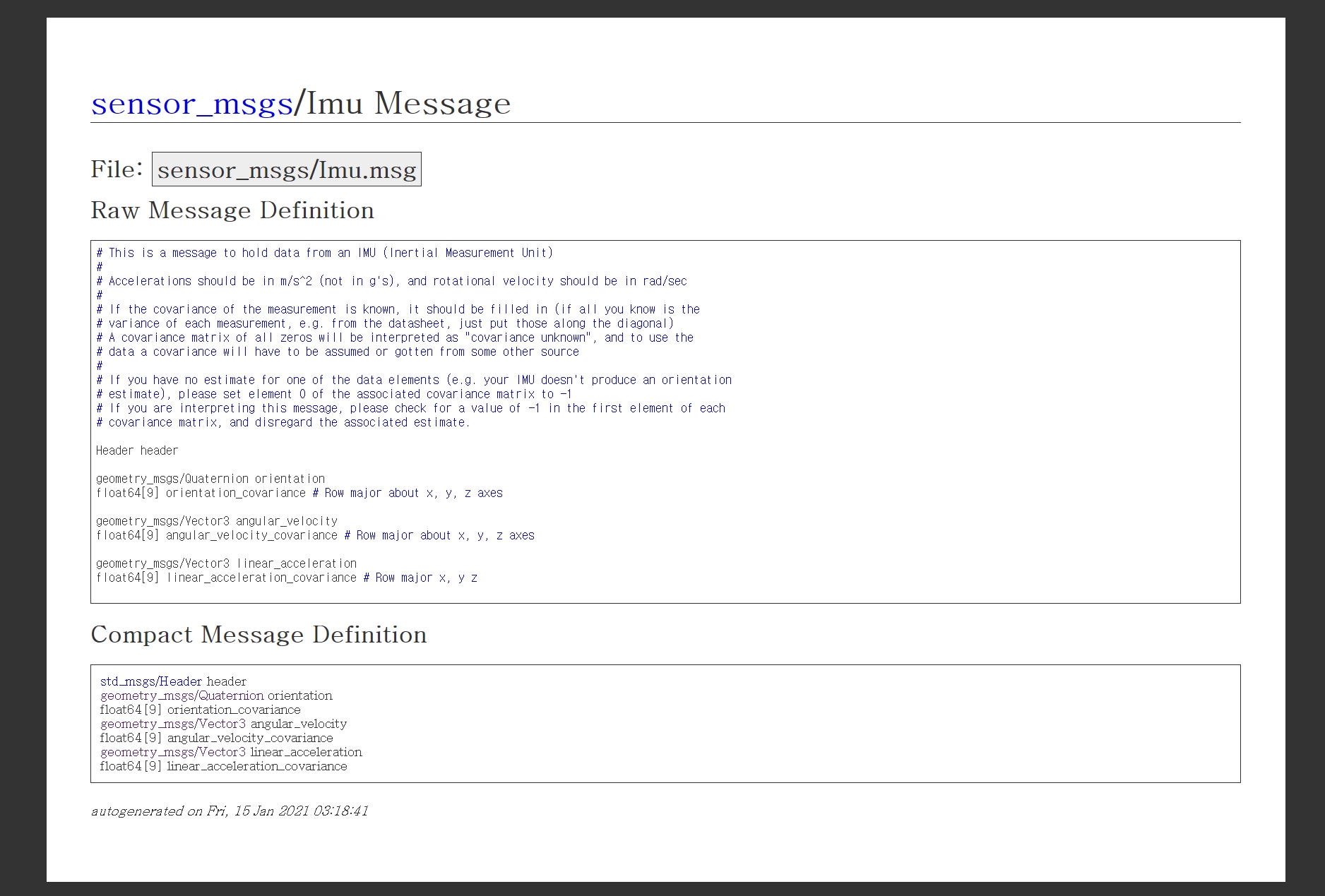
여러 번 소개했지만, IMU에서 퍼블리시하는 메시지 중 하나인 sensor_msgs/Imu를 살펴보면, float64[9]라고 되어 있다. float64, 즉 실수 형 숫자 9개로 이루어진 데이터란 뜻이다. 실제로 이 자료형을 쓰고 있는 데이터들은 x, y, z 축에 대한 공분산을 나타내고 있다.
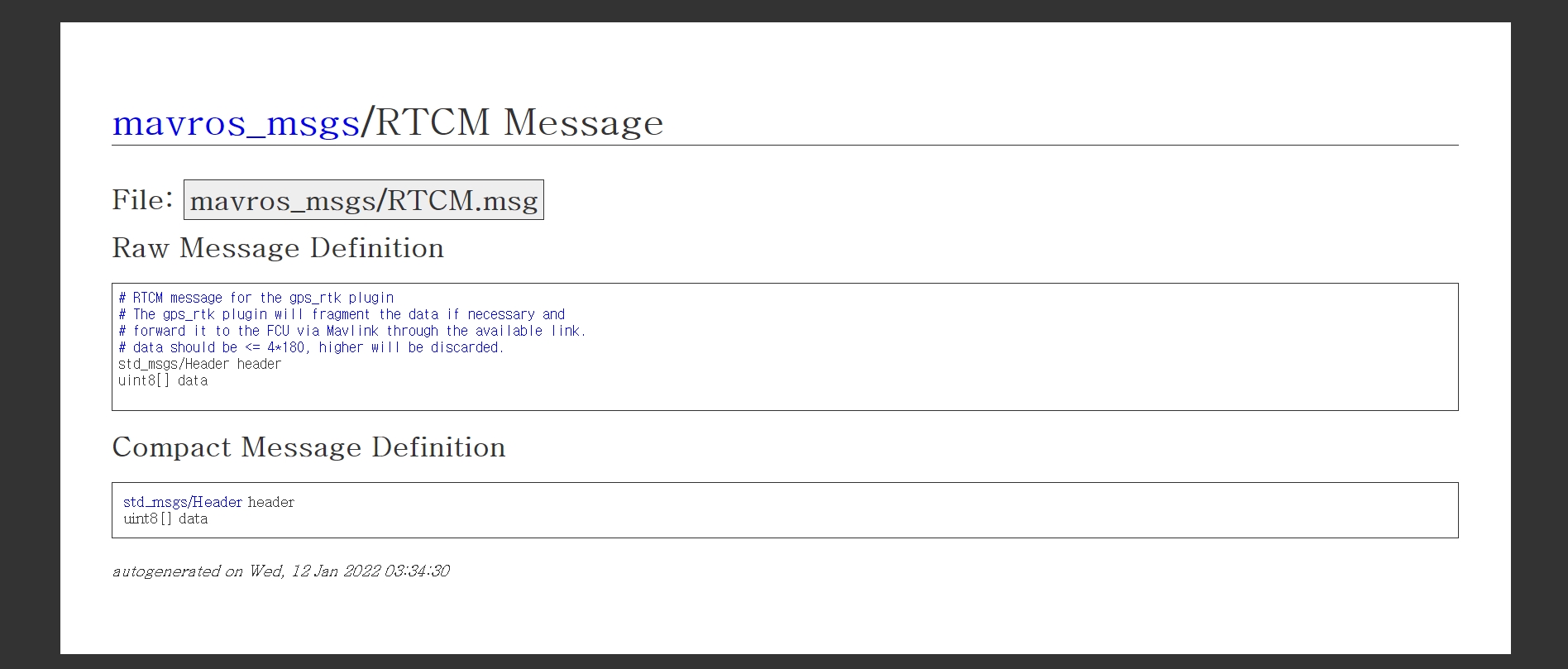
또 다른 예를 보자. 여기서는 배열의 크기가 지정되지 않고 그저 []라고만 되어 있다. 배열의 크기가 매번 바뀌는 경우 이렇게 지정할 수도 있다.
💌 배열을 포함한 커스텀 메시지 만들기
(0) 순서
순서는 앞선 포스팅과 동일하므로 자세한 설명은 생략하고 절차만 나타내겠다.
- 구상하기
- 패키지 만들기
msg파일 만들기- 소스코드 만들기
package.xml,CMakeList.txt파일 수정하기- 실행하기
(1) 구상하기
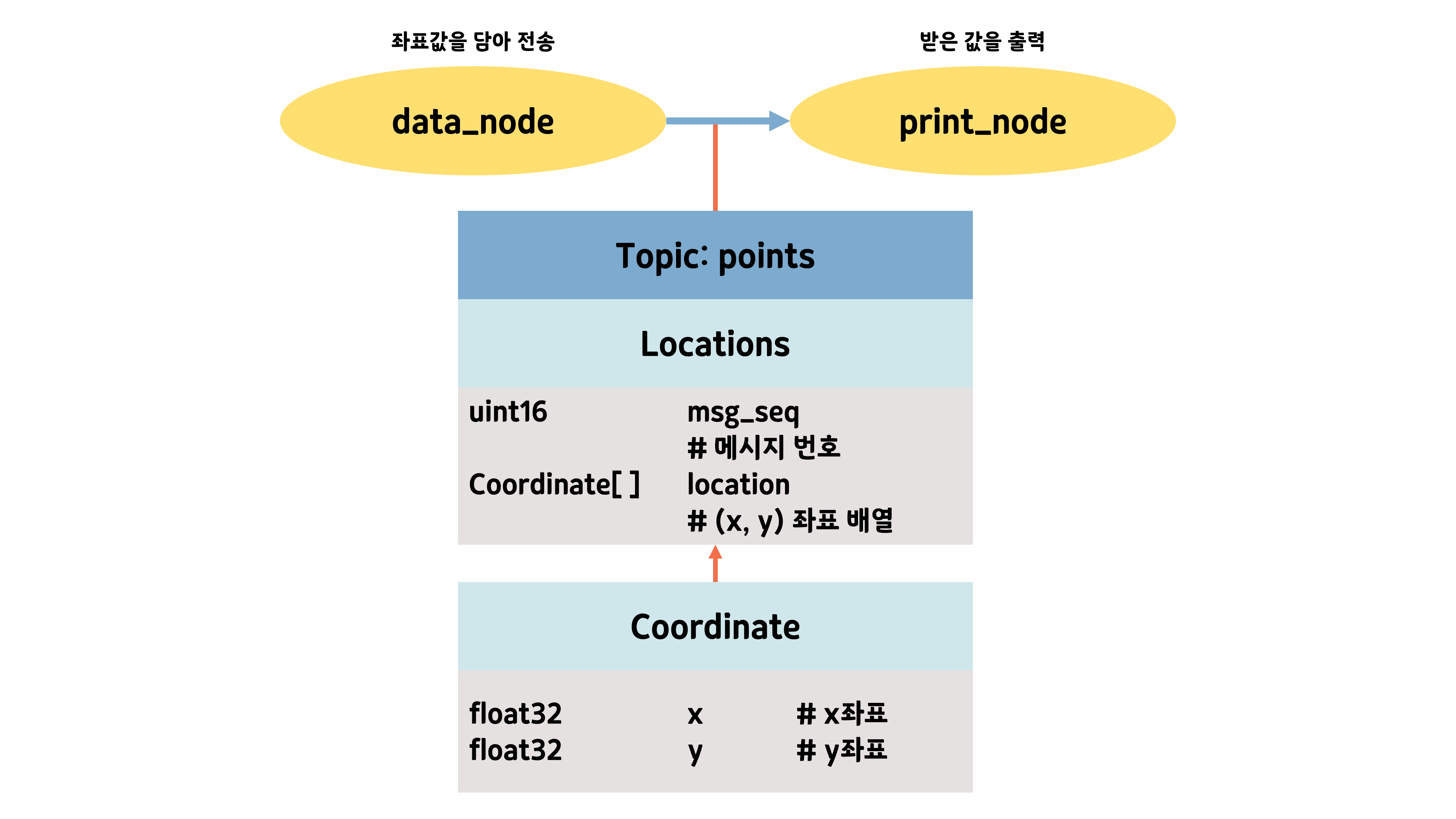
메시지의 번호와 (x, y) 좌표 여러 개의 정보를 한 토픽에 담아 전송해보자.
단순히 data_node에서는 값을 퍼블리시하고 print_node에서는 값을 받아 터미널에 출력하기만 할 것이다. 퍼블리시/서브스크라이브 되는 토픽의 이름은 poins이다.
메시지를 보면, 토픽 points에서 사용하는 자료형 Locations에서는 (x, y) 좌표인 location을 Coordinate라는 자료형의 배열로 하고 있다. 메시지형 Coordinate는 각각 실수형의 x, y 값을 가지고 있다. 직관적으로 이해하자면 [x, y]라고 표시했을 때, location = [[1, 2], [3, 4], [6, 7], [7, 8],...]가 된다는 의미이다.
(2) 패키지 만들기
이번 포스팅에서도 파이썬을 기준으로 설명할 예정이다. C++로 만들 경우 [ROS] 패키지 빌드와 노드 작성 을 참고하자.
/catkin_ws/src로 이동해 패키지를 생성한다.
$ cd /catkin_ws/src
$ catkin_create_pkg custom_msg2_pkg std_msgs rospy
(3) msg 파일 만들기
패키지 디렉토리 내에 msg 디렉토리를 만들고 그 안에 두 개의 메시지 파일 Locations.msg, Coordinate.msg를 만든다.
Locations.msg
uint16 msg_seq
Coordinate[] locationCoordinate.msg
int16 x
int16 y(4) 소스코드 만들기
두 개의 노드에 대해 각각 스크립트를 만든다.
data_node_script.py
#!/usr/bin/env python
#-*- coding:utf-8 -*-
from __future__ import print_function #print함수의 end 옵션 사용 위함
import rospy
import random
from custom_msg2_pkg.msg import Locations, Coordinate
def main():
rospy.init_node('data_node', anonymous=False)
pub = rospy.Publisher('points', Locations, queue_size=10)
rate = rospy.Rate(1)
count = 1
while not rospy.is_shutdown():
loc = Locations()
loc.msg_seq = count # 메시지 번호
loc_size = random.randrange(1,5) # 좌표 개수를 랜덤으로 1~4개 중 택
for i in range(loc_size):
x_value = random.randrange(-50,51) # x좌표
y_value = random.randrange(-50,51) # y좌표
loc.location.append(Coordinate(x=x_value, y=y_value))
# Coordinate 형으로 배열에 추가함
# 전송할 토픽을 출력해본다.
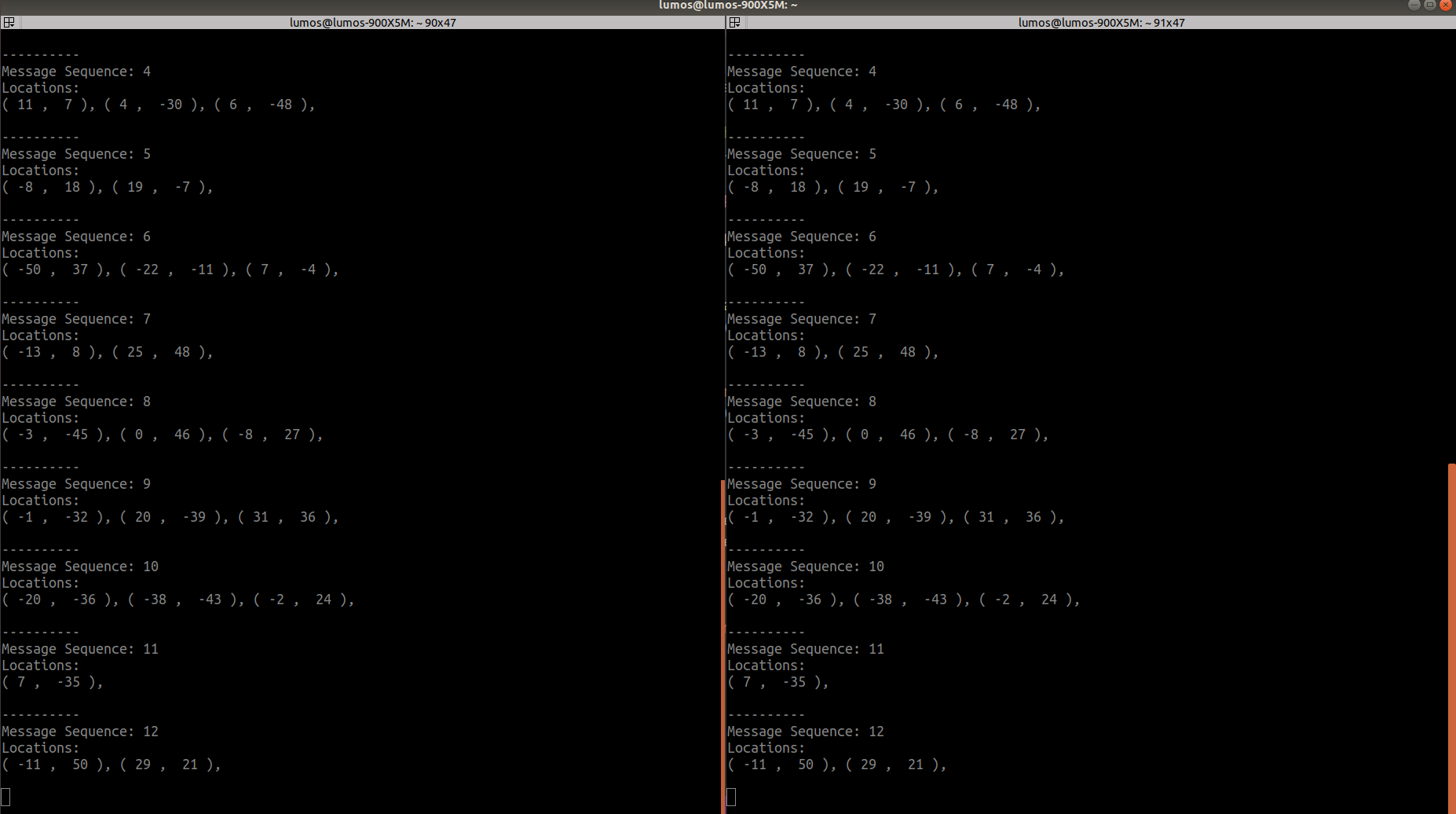
print("-"*10)
print("Message Sequence:", loc.msg_seq)
print("Locations:")
for i in range(loc_size):
print("(", loc.location[i].x, ", ", loc.location[i].y, ")", end=', ')
print("\n")
pub.publish(loc)
rate.sleep()
count += 1
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
passprint_node_script.py
#!/usr/bin/env python
#-*- coding:utf-8 -*-
from __future__ import print_function
import rospy
from custom_msg2_pkg.msg import Locations, Coordinate
def points_topic_callback(data):
loc_size = len(data.location)
print("-"*10)
print("Message Sequence:", data.msg_seq)
print("Locations:")
for i in range(loc_size):
print("(", data.location[i].x, ", ", data.location[i].y, ")", end=', ')
print("\n")
def main():
rospy.init_node('print_node', anonymous=False)
rospy.Subscriber("points", Locations, points_topic_callback)
rospy.spin()
if __name__ == '__main__':
main()(5) package.xml, CMakeList.txt 파일 수정하기
[1] package.xml에 아래 내용을 추가한다.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>[2] CMakeList.txt에 아래 내용을 수정한다.
# message_generation을 추가한다.
find_package(catkin REQUIRED COMPONENTS
rospy
std_msgs
message_generation
)
# add_message_files의 주석을 풀고 수정한다.
add_message_files(
FILES
Locations.msg
Coordinate.msg
)
# generate_messages의 주석을 푼다.
generate_messages(
DEPENDENCIES
std_msgs
)
# LIBRARIES, CATKIN_DEPENDS의 주석을 풀고, message_runtime을 추가한다.
catkin_package(
# INCLUDE_DIRS include
LIBRARIES custom_msg2_pkg
CATKIN_DEPENDS rospy std_msgs message_runtime
# DEPENDS system_lib
)
# 주석을 풀고 스크립트 이름을 입력한다.
catkin_install_python(PROGRAMS
src/data_node_script.py
src/print_node_script.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)[3] 스크립트 파일에 실행 권한을 부여한다.
$ chmod +x data_node_script.py print_node_script.py[4] 빌드를 진행한다.
$ catkin_make (또는 cm)(6) 실행하기
roscore를 켤 창, data_node_script.py를 켤 창, print_node_script.py를 켤 창, 이렇게 총 3개의 터미널 창이 필요하다. 서브스크라이브 되는 스크립트가 먼저 실행되는 것이 편리하다.
$ roscore
$ rosrun custom_msg2_pkg data_node_script.py
$ rosrun custom_msg2_pkg print_node_script.py
rqt 그래프와 토픽 리스트, 메시지 내용도 확인할 수 있다.
$ rqt_graph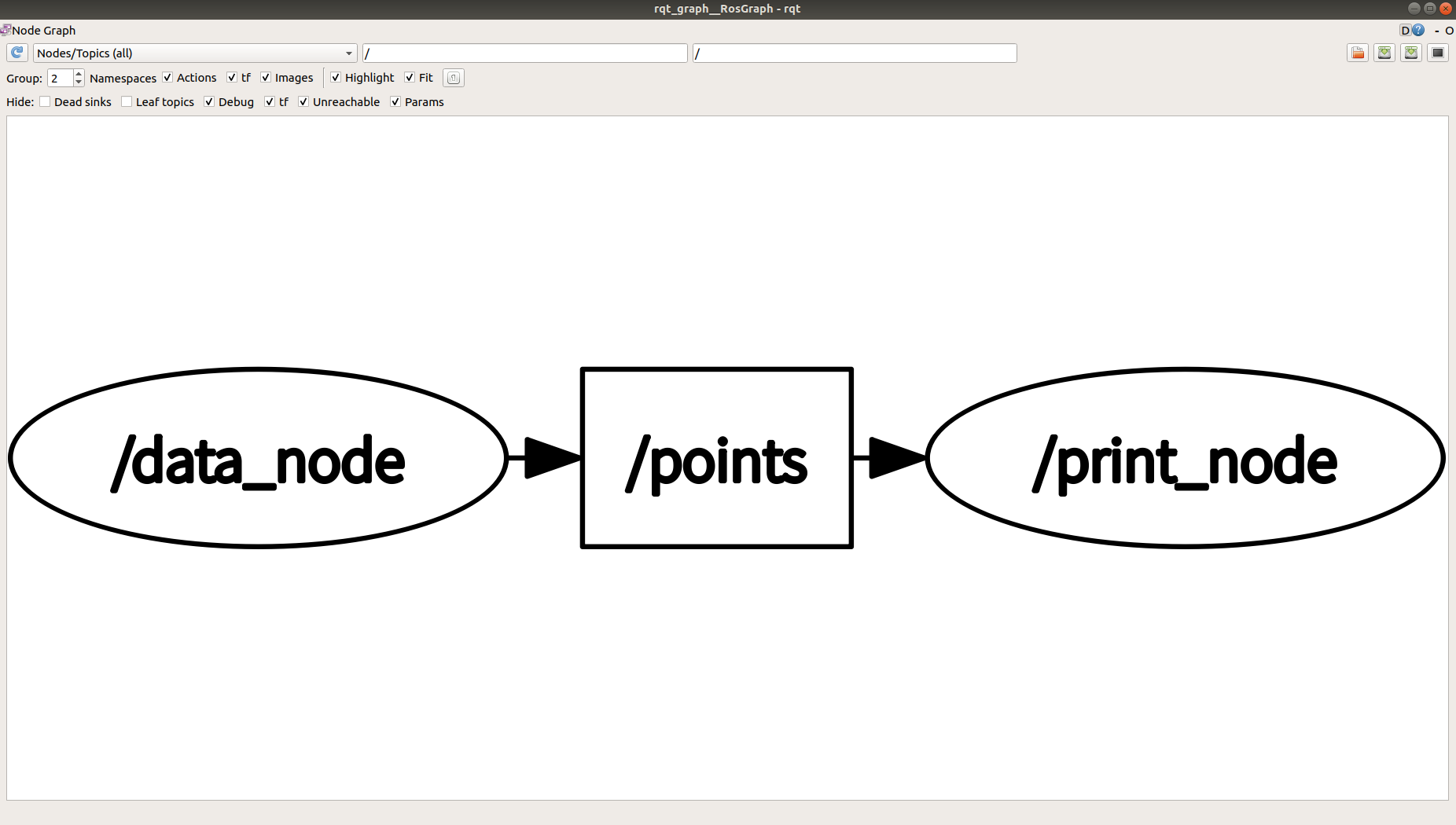
$ rostopic list
$ rostopic echo /points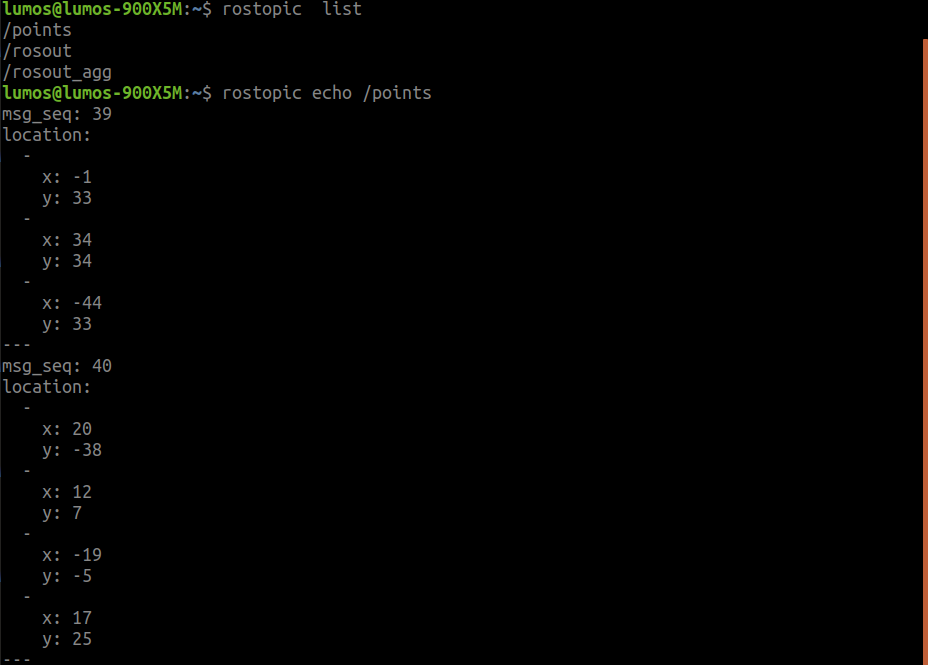
참고 문헌
