
👏 들어가기 전에
본격적인 실습에 들어갈 것이다. 갖춰진 실습 환경에서 직접 하나하나 따라해보길 바란다.
본 포스팅에서는 Python과 C++ 두 가지 버전 모두를 다루고 있으니, 본인이 원하는 언어의 스크립트로 보면 된다.
본문에 나오는 개념, 단어들이 생소하다면 앞선 포스팅들을 보면서 따라오자!
✅ ROS의 빌드 시스템
Catkin(캐킨)은 ROS의 빌드 시스템이다.
CMake(Cross Platform Make)를 기본적으로 이용하여, 패키지 폴더에 CMakeList.txt라는 파일에 빌드 환경을 기술해야 한다. ROS에서는 CMake를 ROS에 맞게 수정해 특화된 캐킨 빌드 시스템을 만들었으며, ROS관련 빌드, 패키지 관리, 패키지 간 의존관계 등을 편리하게 사용할 수 있게 되었다.
🔧 패키지 빌드 과정
- 패키지 생성
- 패키지 설정 파일(package.xml) 수정
- 빌드 설정 파일(CMakeList.txt) 수정
- 메시지 파일 작성
- 소스 코드 작성
- 빌드 전 처리
- 노드 실행
1. 패키지 생성
가장 먼저 패키지를 생성한다. 도시락을 만들기 위해 도시락 통을 준비하는 것과 마찬가지라 보면 된다.
터미널을 켜고, /catkin_ws/src로 이동한 뒤 명령어를 입력한다. catkin_create_pkg [패키지 이름] [의존성 패키지]
catkin_create_pkg test_pkg std_msgs rospy roscpp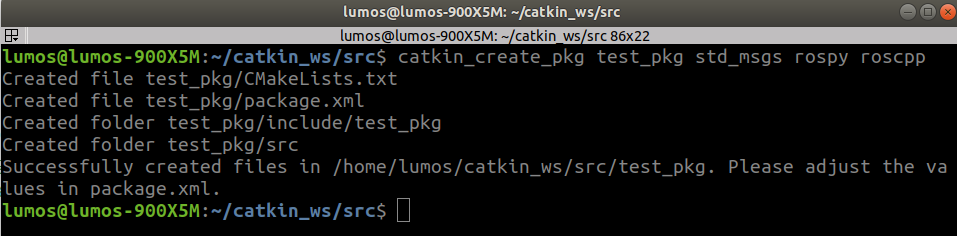
- 의존생 패키지는 해당 패키지에서 사용할 의존성을 기술한다. 여기서는
std_msgs(주고 받을 메시지 타입 위함),rospy(python 사용 위함),roscpp(C++ 사용 위함) - 의존성 패키지는 여러 개를 동시선언할 수 있고, 추후에 package.xml에서 추가/변경할 수 있다
- 위와 같이 사용자가 패키지 작성 시, 캐킨 빌드 시스템에 필요한
CMakeList.txt,package.xml, 관련 폴더를 생성한다. - 패키지 이름에는 공백이 있어선 안 되며, 소문자를 사용하고, 언더바(
_)를 사용해 단어를 붙인다
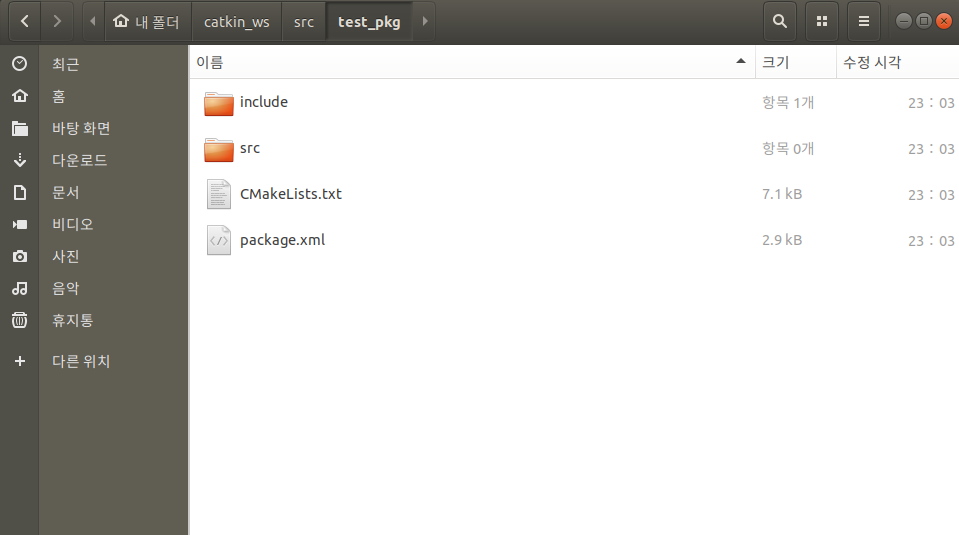
해당 명령 직후 ~/catkin_ws/src/패키지명 폴더 내에 생성되는 파일 및 폴더는 아래와 같다. 추후 사용자의 필요에 따라 /launch, /msg 등의 폴더를 추가적으로 생성할 수 있다. launch는 추후 이어질 포스팅에서 다룬다.
| 폴더, 파일 | 설명 |
|---|---|
| /include | 헤더 파일 |
| /src | 코드 소스 파일 |
| CMakeList.txt | 빌드 설정 파일 |
| package.xml | 패키지 설정 파일 |
2. 패키지 설정 파일(package.xml) 수정
package.xml 는 패키지의 이름, 저작사, 라이선스, 의존성 패키지 등을 기술하고 있는 파일로, ROS의 필수 설정 파일의 하나이다.
패키지 폴더에서 package.xml파일을 찾아 연다면 아래와 같은 내용을 볼 수 있을 것이다.
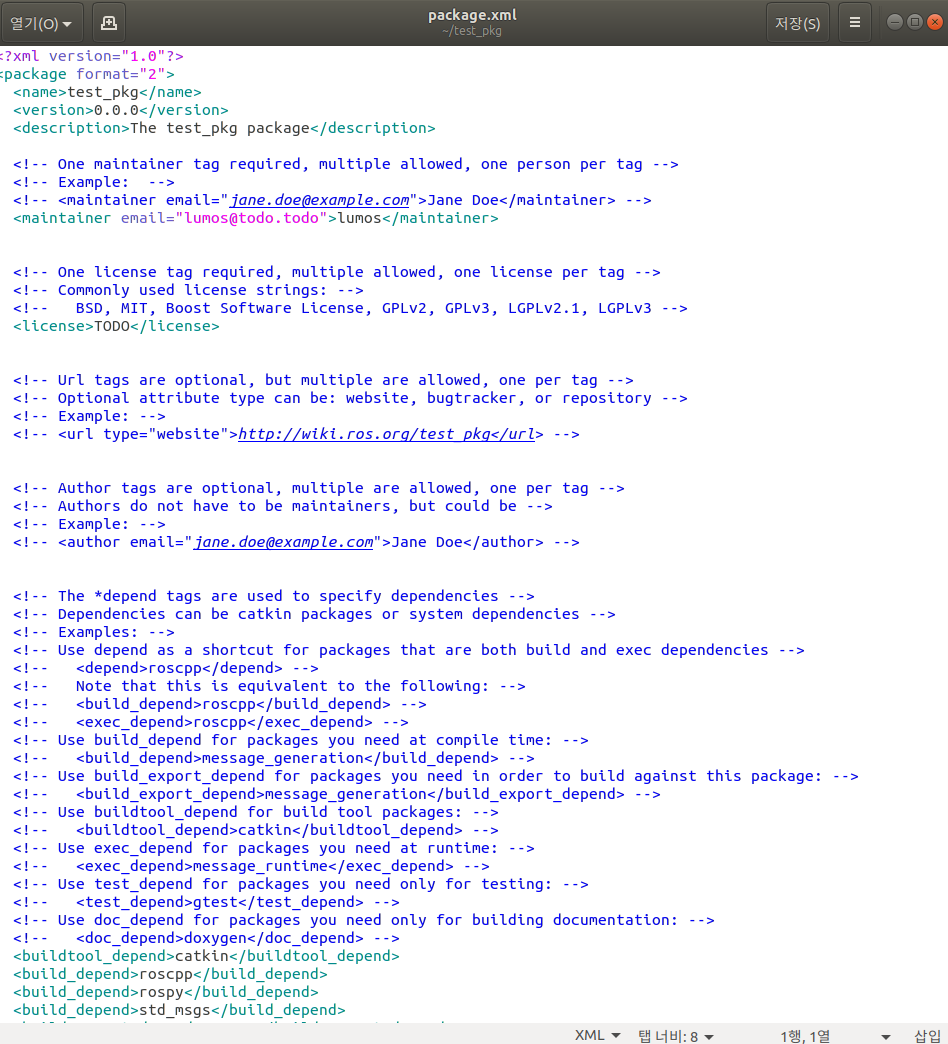
주 내용은 다음과 같다.
- 기본 구조
<?xml>: 문서 문법을 정의하는 문구. xml 버전을 나타냄<package>: 해당 태그로 감싼 부분이 ROS 패키지 설정 부분임
- 패키지 정보
<name>: 패키지의 이름. 패키지 생성시 입력한 이름이 적용되며, 사용자의 임의 변경이 가능함<version>: 패키지 버전으로, 자유로운 지정이 가능하다,<description>: 패키지에 대한 설명으로, 2-3문장으로 입력한다.<maintainer>: 패키지 관리자의 이름과 메일 주소(태그의 옵션 email을 이용)를 입력한다.<license>: 라이선스를 기재한다.(e.g. GPL, BSD, ASL)<url>: 패키지를 설명하는 웹페이지, 버그 관리, 저장소 등의 주소<author>: 패키지 개발에 참여한 개발자의 이름과 이메일 주소를 적는다. 여러 명의 개발자의 경우 바로 다음줄에 해당 태그를 추가하며 입력한다.
- 의존 패키지(Dependency)
<buildtool_depend>: 빌드 시스템의 의존성이며, Catkin 빌드 시스템을 이용한다면catkin을 입력한다.<build_depend>: 패키지를 빌드할 때 의존하는 패키지 이름을 입력한다.<run_depend>: 패키지를 실행할 때 의존하는 패키지 이름을 입력한다.<test_depend>: 패키지를 테스트할 때 의존하는 패키지 이름을 입력한다.
- 메타패키지(Metapacakge)
<export>: ROS에서 명시하지 않은 태그명을 사용할 때 주로 쓰인다.<metapackage>: export 태그 안에서 사용하는 공식적인 태그 중 하나로, 현재 패키지가 메타패키지일 경우 선언한다.
해당 내용을 맞게 바꾸어준다. 주석과 당장 필요 없는 부분을 지운다. 패키지 생성 당시 의존성으로 std_msgs, rospy, roscpp를 입력해주었으므로 자동적으로 <build_depend>, <build_export_depend>, <exec_depend>가 채워져 있다. 만약 패키지 생성 당시 명령어 옵션으로 추가하지 못했거나 추후 추가한다하면 해당 의존성 패키지를 이 파일에 입력해주면 된다.
아래 코드는 필자의 예시이며, 이메일 주소 등은 본인의 것으로 바꿔보자. 이메일 주소, 라이선스 등은 패키지를 공개/배포할 경우 필요하며, 그렇지 않다면 굳이 바꿀 필요는 없다.
<?xml version="1.0"?>
<package format="2">
<name>my_example_pkg</name>
<version>0.0.0</version>
<description>The my_example_pkg package</description>
<maintainer email="717lumos@gmail.com">Han EunGi</maintainer>
<license>BSD</license>
<url type="website">https://github.com/EunGiHan</url>
<url type="website">https://velog.io/@717lumos</url>
<author email="717lumos@gmail.com">Han EunGi</author> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<export>
</export>
</package>3. 빌드 설정 파일(CMakeList.txt) 수정
CMakeList.txt 는 빌드 환경을 기술하고 있는 파일로, 실행 파일 생성과 의존성 패키지 우선 빌드, 링크 생성 등을 설정할 수 있다.
처음 보이는 CMakeList.txt 파일은 아래와 같다. 매우 긴 주석이 있으며, 패키지 생성 당시 파라미터로 넣었던 의존성 패키지에 따른 내용이 들어가 있다.
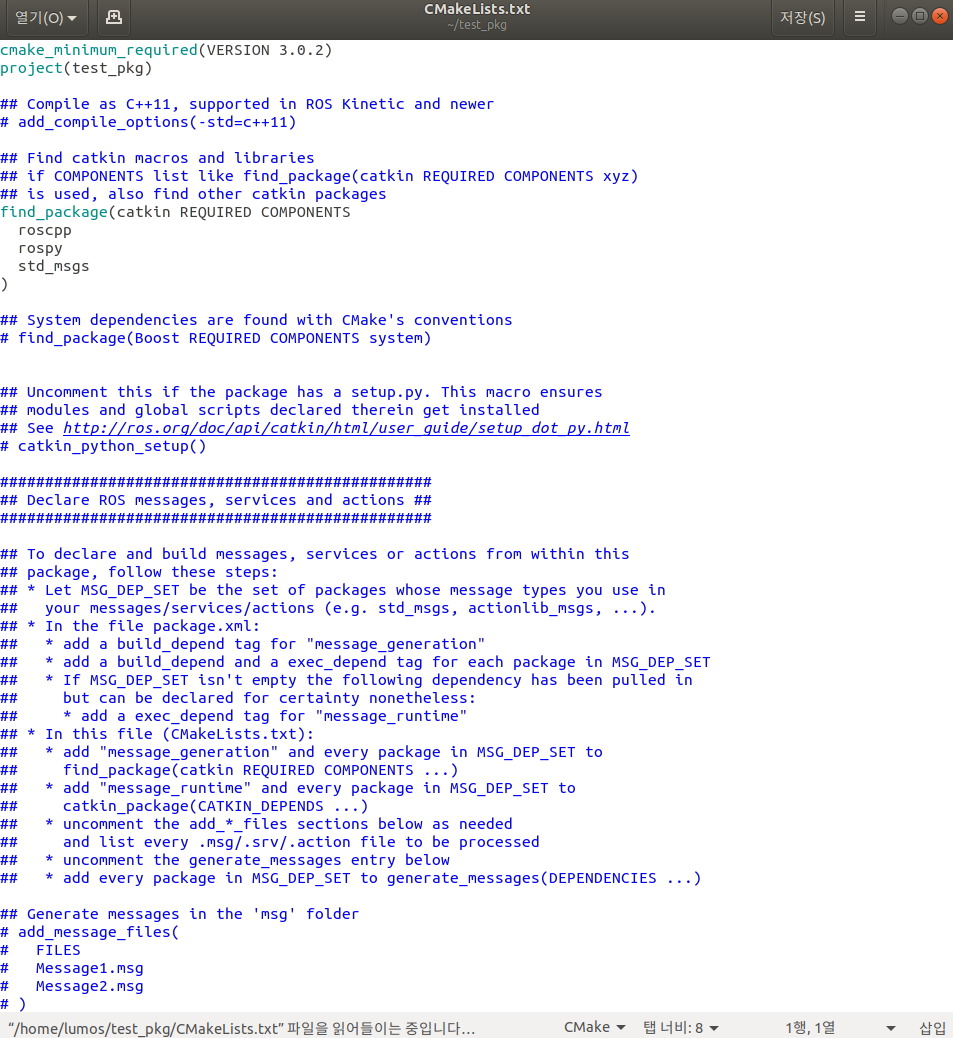
코드의 주석을 일부는 삭제하고 일부는 풀어 각각이 의미하는 바를 아래에 적어두었다. 지금 바로 외울 필요는 없다. 필요한 경우 찾아서 추가하는 식으로 진행하는 것이 좋다. 속 편하다는 쪽이 가까울 듯
# 운영체제에 설치된 cmake의 최소 요구 버전
cmake_minimum_required(VERSION 3.0.2)
# 패키지의 이름으로, package.xml에서 입력한 패키지 이름을 그대로 사용
project(test_pkg)
# 캐킨 빌드할 시 요구되는 구성 요소 패키지. 사용자가 만든 패키지가 의존하는 다른 패키지를 먼저 설치하는 옵션
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
# ROS 이외의 패키지를 사용하는 예: Boost를 사용할 때 system 패키지를 설치하도록 함
find_package(Boost REQUIRED COMPONENTS system)
# 파이썬을 이용하기 위해 rospy를 사용할 때 설정하는 옵션. 파이썬 설치 프로세스인 setup.py를 부르는 역할
catkin_python_setup()
# 메시지 파일을 추가
# FILES: 현재 패키지 폴더의 msg 폴더 안의 .msg 파일들을 참조해 헤더 파일(.h)를 자동으로 생성한다는 의미
# 만약 새 메시지를 만든다면 msg 폴더를 만든 뒤 그 안에 있는 메시지 파일 이름을 입력함. 여기에서는 MyMessage1.msg 등이 그 예.
add_message_files(
FILES
MyMessage1.msg
MyMessage2.msg
)
# 사용하는 서비스 파일을 추가. 방식은 메시지 파일과 같으며, 사용하려면 srv 폴더를 만든 뒤 해당 파일 이름을 입력해둬야 한다.
add_service_files(
FILES
MyService.srv
)
# 사용하는 서비스 파일을 추가. 방식은 메시지, 서비스 파일과 같다.
add_action_files(
FILES
Action1.action
Action2.action
)
# 의존하는 메시지를 설정
# DEPENDENCIES: 아래에 해당하는 메시지 패키지를 사용한다는 의미
# std_msgs, sensor_msgs가 그 예시
generate_messages(
std_msgs
sensor_msgs
)
# 캐킨 빌드 옵션
## INCLUDE: 뒤에 설정한 패키지 내부 폴더인 include의 헤더 파일을 사용함
## LIBRARIES: 뒤에 설정한 패키지의 라이브러리를 사용함
## CATKIN_DEPENDS: 의존하는 패키지 지정
## DEPENDS: 시스템 의존 패키지
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES test_pkg
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
# include 폴더 지정
include_directories(
${catkin_INCLUDE_DIRS} # 각 패키지 내의 include 폴더를 의미. 이 안의 헤더파일을 이용할 것.
# 사용자가 추가할 때는 이 밑의 공간 이용
)
# 빌드 후 생성할 라이브러리. C++을 사용할 경우!
add_library(${PROJECT_NAME}
src/${PROJECT_NAME}/test_pkg.cpp
)
# 해당 라이브러리 및 실행파일을 빌드하기 전, 생성해야 할 의존성이 있는 메시지와 dynamic reconfigure이 있다면 우선으로 수행하도록 함
add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
# 빌드 후 생성할 실행파일에 대한 옵션 지정
## `__실행 파일 이름__` `__참조할 파일__` 순서대로 기재
## 복수 개의 참조 .cpp 파일이 있을 경우 한 괄호 뒤에 연속적으로 기재
## 생성할 실행파일이 2개 이상일 경우 add_executable 항목을 추가함
add_executable(${PROJECT_NAME}_node src/test_pkg_node.cpp)
# 지정 실행 파일을 생성하기 전, 링크해야 하는 라이브러리와 실행파일을 링크함
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)4. 메시지 파일 작성
새로운 메시지 파일(.msg)를 만들고 이를 사용해 노드를 이용한 통신을 해보자. 커스텀 메시지를 만드는 자세한 내용은 추후 이어질 포스팅에서 다루게 될 것이나, 오늘은 패키지를 어떻게 수정하는 가를 볼 것이므로 따라만 와 보자.
- 우선, 패키지 폴더 내 msg 폴더(
~/test_pkg/msg)를 만든다. - 텍스트 편집기 혹은 VS Code 등을 열어 아래 내용을 입력한다.
time stamp
int32 data- 이 파일을 msg 폴더에 메시지 파일(
test_msg.msg)로 저장한다. 확장자를 반드시.msg까지 입력해 저장해야 한다.

❗️ 메시지 타입의 대표적 예
메시지 기본 타입:time,int32,bool,int8,int16,float32,string,duration등
ROS 사용 빈도 많은 메시지를 모아둔 타입:common_msgs등
5. 소스 코드 작성
해당 메시지를 이용하여 토픽을 송신하는 Publisher(퍼블리셔) 노드와 토픽을 수신하는 Subscribe(서브스크라이버) 노드를 각각 만들어보자.
필자는 처음 ROS를 공부할 때 python 파일로만 소스 코드를 작성했다. 그러나 C/C++를 바탕으로 한 소스코드가 GitHub 등에 많이 나와있고, 각종 센서나 라이브러리도 그를 기반으로 하는 경우가 많으므로, C++ 코드 역시 공부해두어 나쁠 건 없다고 생각한다.
C++ 버전
- 패키지 폴더 내 src 폴더(
~/test_pkg/src)에 퍼블리셔의 .cpp 파일(talker.cpp)을 추가한 뒤 내용을 입력한다. 또는 내용을 입력한 뒤 저장을/src폴더에 해도 된다.모로 가도 한양만 가면 된다.
#include "ros/ros.h" // ROS 기본 헤더 파일
#include "test_pkg/test_msg.h" // 메시지 파일의 헤더. 빌드 후 자동 생성됨
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker"); // 노드 이름 초기화
ros::NodeHandle nh; // ROS 시스템과 통신을 위한 노드 핸들
// 퍼블리셔 선언
//// test_pkg에 정의된 test_msg 메시지 메시지 파일을 이용함
//// 만약 표준 메시지를 사용한다면 그에 맞게 사용해야 함. (예) <std_msgs::String>
//// 토픽 이름: chatter, 큐 사이즈: 100개
ros::Publisher chatter_pub = nh.advertise<test_pkg::test_msg>("/chatter", 100);
// 루프 주기를 10hz로 설정. 1초에 10번 루프를 돌며 메시지를 송신함.
ros::Rate loop_rate(10);
test_pkg::test_msg msg; // 메시지 변수 선언
int count = 0; // 코드 내에서 사용할 변수 선언
while (ros::ok()) // 종료 전까지 계속 반복 수행함
{
msg.stamp = ros::Time::now(); // 메시지 내 stamp 메시지에 현 시각 입력
msg.data = count; // 메시지 내 data 메시지에 count 변수값 입력
ROS_INFO("send time(sec) = %d", msg.stamp.sec);
ROS_INFO("send msg = %d", msg.data);
chatter_pub.publish(msg); // 메시지를 퍼블리시함(토픽으로 전송)
loop_rate.sleep(); // 정해준 주기만큼 일시정지(sleep)
++count;
}
return 0;
}- 같은 방법으로 서브스크라이버 .cpp 파일(
/listener.cpp) 역시 작성한다.
#include "ros/ros.h"
#include "test_pkg/test_msg.h"
// 메시지 콜백 함수 선언
//// 처리할 메시지를 포인터로서 파라미터로 전달. 포인터의 자료형은 메시지의 타입을 명시
void chatterCallback(const test_pkg::test_msg::ConstPtr& msg)
{
ROS_INFO("recieve time(sec) = %d", msg->stamp.sec);
ROS_INFO("recieve msg = %d", msg->data);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener"); // 노드 이름 초기화
ros::NodeHandle nh;
// 서브스크라이버 선언
//// 토픽 이름: chatter(publish 노드에서 주는 토픽), 큐 사이즈: 100개
//// 콜백 함수 이름: chatterCallback(위에서 정의함, 여기서 받은 토픽을 처리함)
ros::Subscriber sub = nh.subscribe("/chatter", 100, chatterCallback);
ros::spin(); // 큐에 요청된 콜백함수를 처리하며, 프로그램 종료시까지 반복함
return 0;
}Python 버전
- 패키지 폴더 내 src 폴더(
~/test_pkg/src)에 퍼블리셔의 .py 파일(talker_py.py)을 추가한 뒤 내용을 입력한다.
#!/usr/bin/env python # 파이썬을 쓴다면 반드시 달아주자
#-*- coding:utf-8 -*- # 한글 주석을 달기 위해 사용한다.
import rospy # ROS 라이브러리
from test_pkg.msg import test_msg # 패키지의 메시지 파일
def main():
# 퍼블리시 노드 초기화
## 노드 이름 talker
rospy.init_node('talker', anonymous=True)
# 퍼블리셔 변수
## 퍼블리시 토픽 이름 chatter, 메시지 타입 test_msg
pub = rospy.Publisher('chatter', test_msg, queue_size=10)
# 10헤르츠마다 반복(변수=rate)
rate = rospy.Rate(10) # 10hz
msg = test_msg() # 메시지 변수 선언
count = 0 # 코드에서 사용할 변수 선언
# 중단되거나 사용자가 강제종료(ctrl+C) 전까지 계속 실행
while not rospy.is_shutdown():
msg.stamp = rospy.Time.now() #현재 시각 담음
msg.data = count # count 변수 값 담음
# 터미널에 출력
rospy.loginfo("send time(sec) = %d", msg.stamp.secs)
rospy.loginfo("send msg = %d", msg.data)
# 메시지를 퍼블리시
pub.publish(msg)
# 정해둔 주기(hz)만큼 일시중단
rate.sleep()
count += 1
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
pass- 패키지 폴더 내 src 폴더(
~/test_pkg/src)에 서브스크라이버의 .py 파일(listener_py.py)을 추가한 뒤 내용을 입력한다.
#!/usr/bin/env python
#-*- coding:utf-8 -*-
import rospy
from test_pkg.msg import test_msg
# 퍼블리셔 노드로부터 토픽을 받아들이는 콜백 함수
def callback(data):
# 받은 내용(data)를 터미널에 출력
rospy.loginfo("recieve time(sec) = %d", data.stamp.secs)
rospy.loginfo("recieve msg = %d", data.data)
def main():
# 노드 초기화. 이름은 listener
rospy.init_node('listener', anonymous=True)
# 특정 토픽(chatter)를 callback이라는 이름의 함수로 받아들이며, 메시지 타입은 test_msg
rospy.Subscriber("chatter", test_msg, callback)
rospy.spin()
if __name__ == '__main__':
main()6. 빌드 전 처리
C++ 버전
package.xml파일 속 다음 부분을 추가한다.
<build_depend>message_generation</build_depend>
<!--<run_depend>message_runtime</run_depend>-->
<!--빌드 시 <exec_depend>가 에러 난다면 <run_depend>로-->
<exec_depend>message_runtime</exec_depend>만약 다른 패키지의 메시지 파일을 쓴다면
<build_depend>메시지 파일이 있는 패키지 이름</build_depend>,<run_depend>메시지 파일이 있는 패키지 이름</run_depend>도 추가해야 한다.
CMakeList.txt파일 속 다음 부분을 수정한다.
### 1. find_package에 [essage_generation] 추가
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
### 2. add_message_files의 주석 풀고, 예시문은 지운 뒤 만들어둔 메시지 파일 이름으로 변경
add_message_files(
FILES
test_msg.msg
)
### 3. generate_messages 주석 풀기
generate_messages(
DEPENDENCIES
std_msgs
)
### 4. catkin_package 주석 풀기 & [message_runtime]추가
catkin_package(
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
)
### 5. include_directories 주석 풀기
include_directories(
include
${catkin_INCLUDE_DIRS}
)
### 6. add_executable 추가. src폴더에 있는 talker.cpp, listener.cpp를 talker, listener이라는 실행파일로 한다는 이야기.
add_executable(talker src/talker.cpp)
target_link_libraries(talker
${catkin_LIBRARIES}
)
add_executable(listener src/listener.cpp)
target_link_libraries(listener
${catkin_LIBRARIES}
)- 수정 사항을 포함해 패키지를 빌드한다.
$ catkin_make #예약어를 설정해놓았다면 cm빌드한 결과물의 생성 위치와 내용은 다음과 같다.
~/catkin_ws/build: 캐킨 빌드에서 사용된 설정 내용~/catkin_ws/devel/lib/test_pkg: 실행 파일~/catkin_ws/devel/include/test_pkg: 메시지 파일로부터 자동 생성된 메시지 헤더 파일
Python 버전
package.xml파일 속 다음 부분을 추가한다.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>CMakeList.txt파일 속 다음 부분을 주석을 풀거나 수정한다.
# message_generation을 추가한다.
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# add_message_files의 주석을 풀고 수정한다.
add_message_files(
FILES
test_msg.msg
)
# generate_messages의 주석을 푼다.
generate_messages(
DEPENDENCIES
std_msgs
)
# LIBRARIES, CATKIN_DEPENDS의 주석을 풀고, message_runtime을 추가한다.
catkin_package(
# INCLUDE_DIRS include
LIBRARIES test_pkg
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
# 주석을 풀고 스크립트 이름을 입력한다. talker_py.py, listener.py를 파이썬으로 사용한다는 이야기
catkin_install_python(PROGRAMS
src/talker_py.py
src/listener_py.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)- 수정 사항을 포함해 패키지를 빌드한다.
$ catkin_make #예약어를 설정해놓았다면 cm- 파이썬 스크립트 두 개 각각에 대해 권한을 허용한다.
$ chmod +x talker_py.py
$ chmod +x listener_py.py7. 노드 실행
한 터미널에 roscore를 실행해두고 다른 터미널 각각에 다음의 명령어를 실행한다. subscribe를 먼저 켜는 것이 낫다.
$ rosrun test_pkg listener
#python이라면 $ rosrun test_pkg listener_py.py
$ rosrun test_pkg talker
#python이라면 $ rosrun test_pkg talker_py.py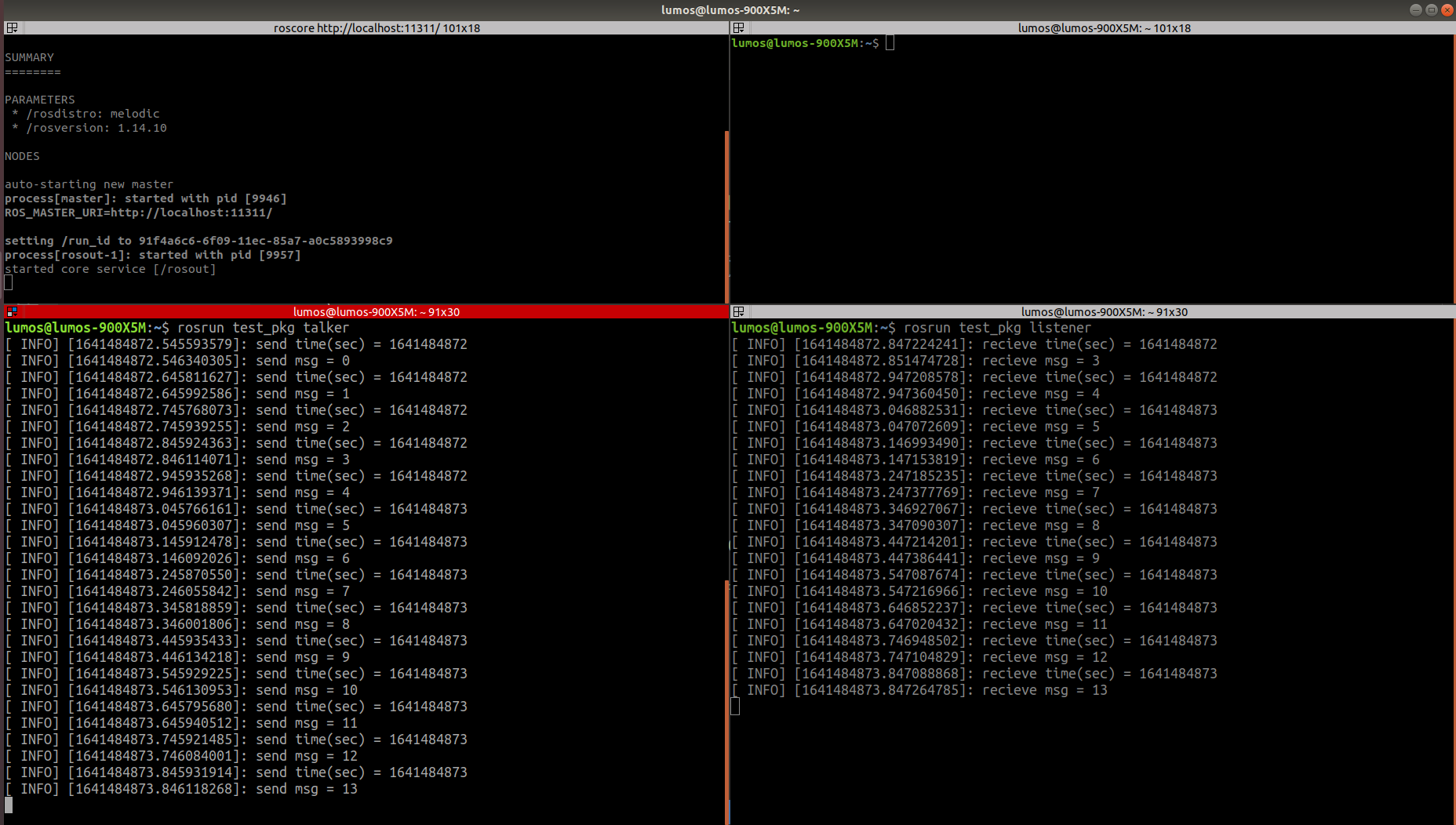
현재 퍼블리시 중인 토픽의 목록을 확인하려면 rostopic list를, 특정 토픽의 내용(메시지)를 확인하려면 rostopic echo /토픽 이름을 다른 터미널 창에 입력하면 된다.
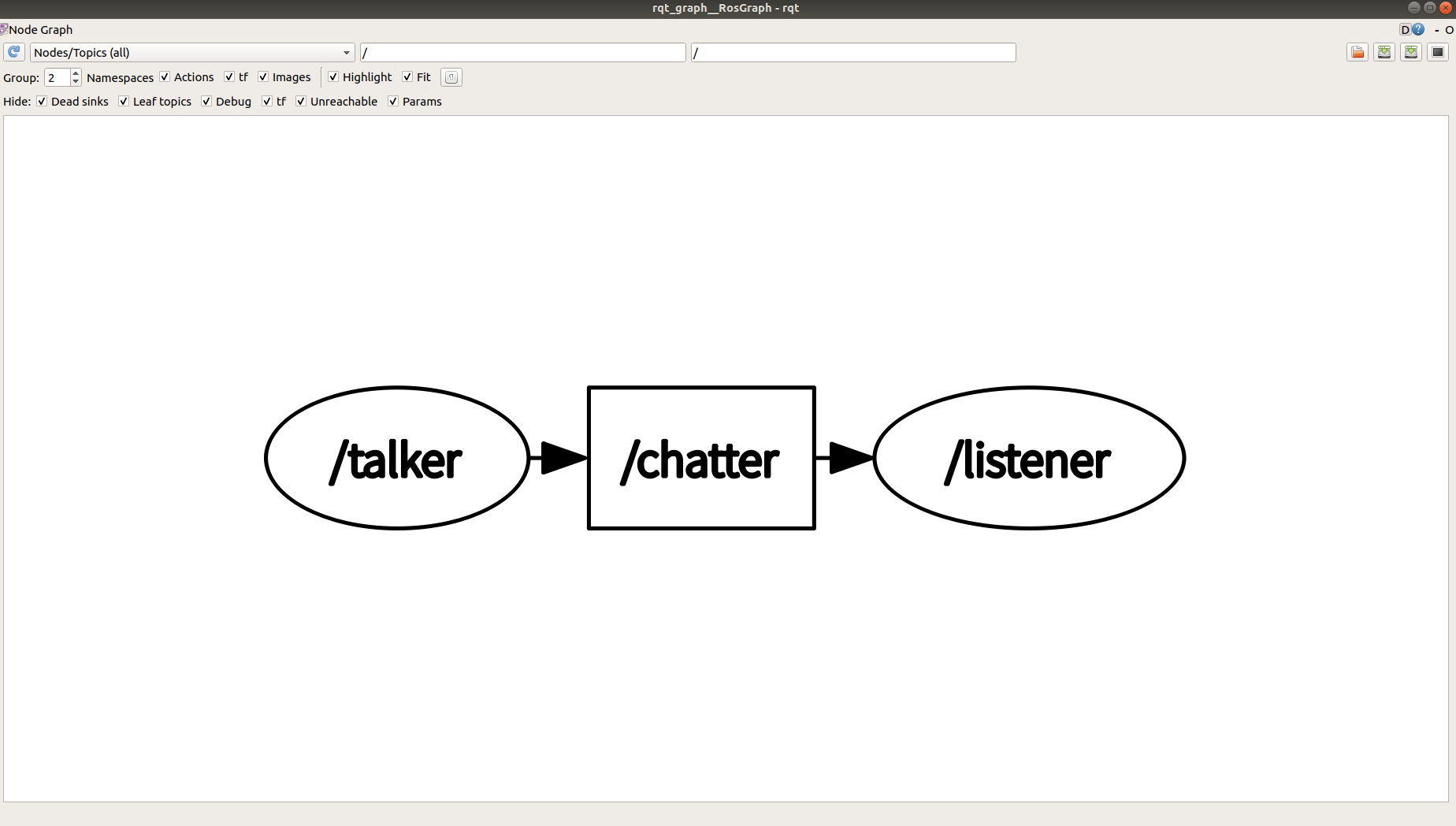
또한 통신 상태를 확인하려면, rqt_graph 명령어를 수행해 시각화가 가능하다
참고 문헌
- CMakeLists, "ROS Wiki"
- Creating Msg And Srv, "ROS Wiki"
- WritingPublisherSubscriber(C++), "ROS Wiki"
- Writing Publisher Subscriber(python), "ROS Wiki"
- 표윤석, 조한철, 정려운, 임태훈. ROS 로봇 프로그래밍. 루비페이퍼

좋은 정보 감사합니다. 다만 글쓴이분께서 올려주신 대로 해보고 있는데 catkin_make으로 빌드하는 과정에서 talker.cpp과 listener.cpp에서 두번째 줄의 #include "test_pkg/test_msg.h"에서 test_msg.h가 없다고 빌드가 되지 않습니다. 해당 헤드는 빌드 후에 자동 생성된다고 주석하셨는데 제가 놓친 것이 있을까요? 아니면 제 환경이 빌드할 수 없는 환경일까요?