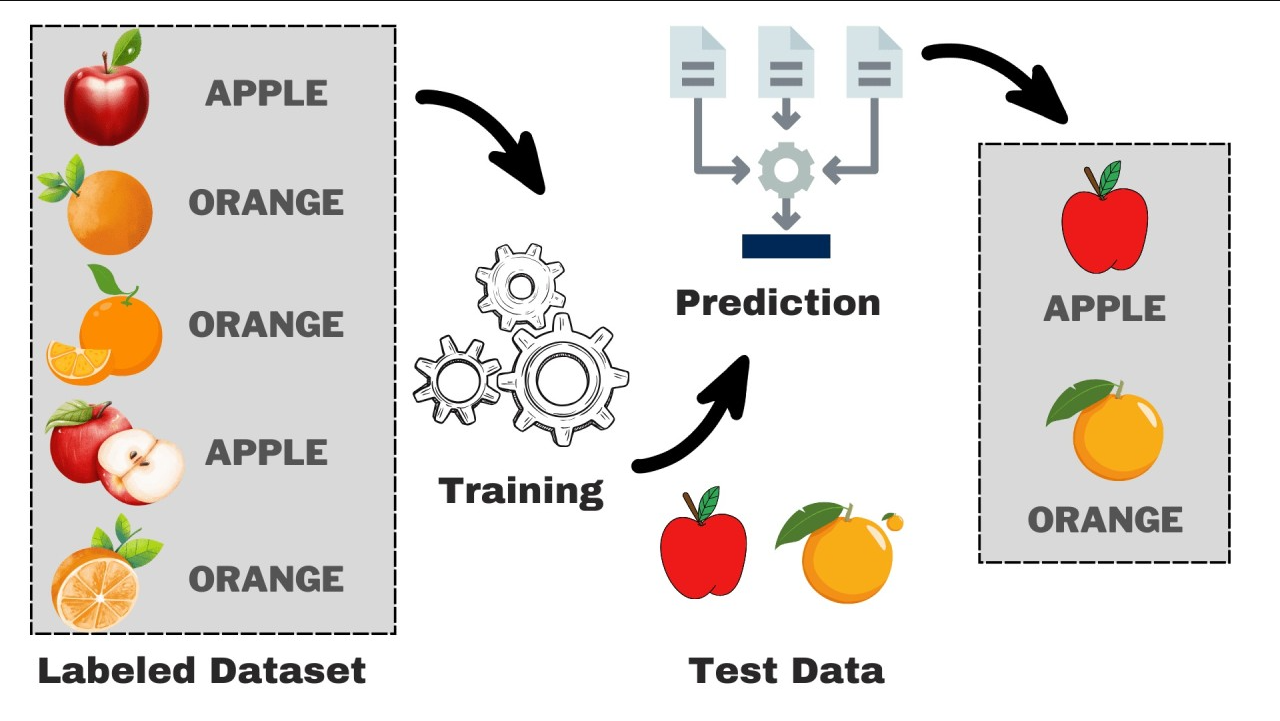
Supervised Learning
출처: https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.kdnuggets.com%2Funderstanding-supervised-learning-theory-and-overview&psig=AOvVaw34FHZ4IWwtPShgE
입력 데이터(x)와 그에 대한 정답(y)를 이용해서 모델을 학습시키고 예측을 만드는 것
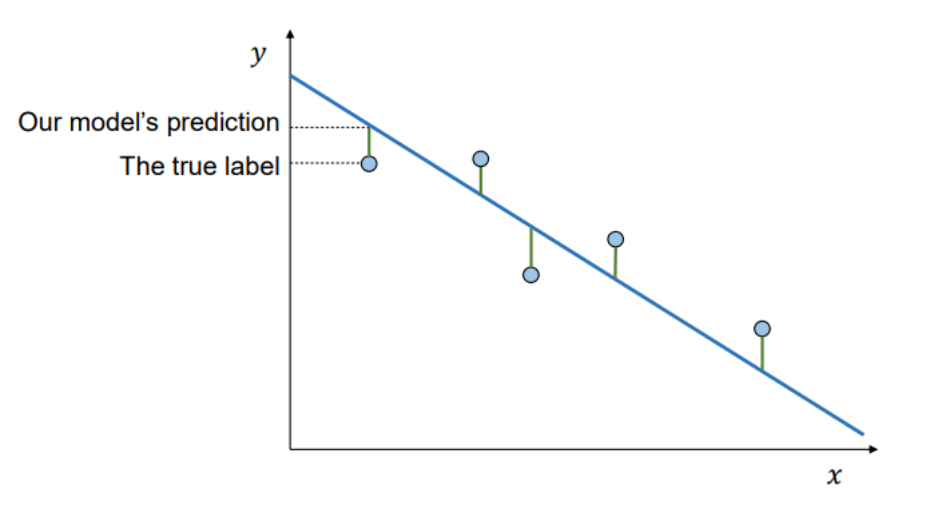
Cost Function
- 모델의 예측이 얼마나 잘못되었는지를 수치로 표현한 함수
- 즉, 정답(label)과 예측(prediction) 사이의 오차를 정량화함
- Loss function 또는 Objective function이라고도 불림
- 모델이 학습을 통해 오차를 줄이는 방향으로 파라미터를 조정할 수 있게 해 줌
- 비용이 높을수록 성능이 나쁜 모델이라는 뜻
Cost Function에 따라 학습 속도, 최종 정확도 등 학습 결과가 크게 달라질 수 있음
- Mean Absolute Error (MAE)
- Mean Squared Error (MSE)
- Cross-Entropy
- Hinge Loss
- Kullback-Leibler Divergence (KL-Divergence)
이외에도 다양한 Cost Function 존재
Linear Regression
- 독립 변수 𝑥와 종속 변수 𝑦사이의 선형 관계를 모델링하는 기법
- x= {x1, x2,..., xn}, xi∈Rd
- y= {y1, y2,..., yn}, yi∈R
- a= {a1, a2,..., an}, ai∈R, a: parameter
- y=a0+a1x1+a2x2+⋯+adxd=∑i=1daixi+a0
MSE
C(x)=n1∑i=1n∥yi−yi′∥2=n1∑i=1n∥yi−f(x)∥2
MAE
C(x)=n1∑i=1n∥yi−yi′∥=n1∑i=1n∥yi−f(x)∥
Training
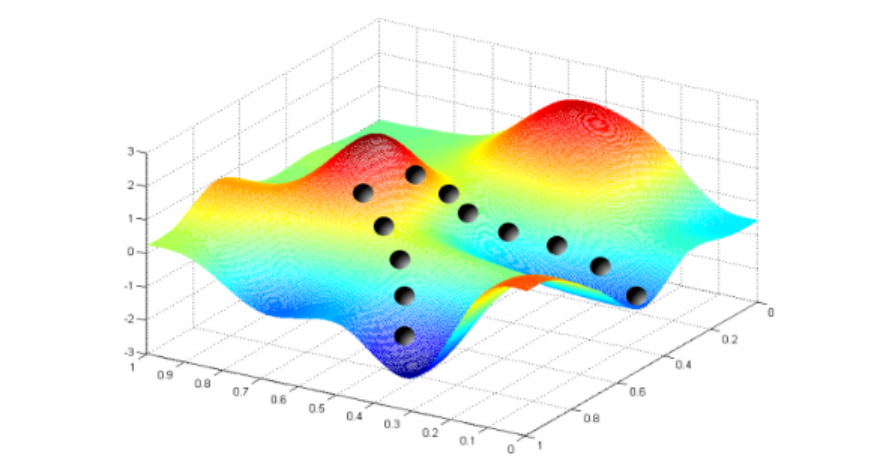
- 파라미터 a0, a1,...를 조정하여 비용 함수 C(a,x)를 최소화하는 과정
- 대부분의 경우, 파라미터 공간(parameter space)은 매우 크고 복잡함
- GPT-3는 약 1750억 개의 파라미터를 가짐
- 조합의 수는 사실상 무한대에 가까움
- 학습은 무작위 초기값에서 시작하여 비용을 줄이는 방향으로 파라미터를 업데이트함
- 다양한 지역 최소점(local minima)이 존재
- 전역 최소점(global minimum)에 도달하는 것이 목표
Given a function f:A→R, find x′∈A such that f(x′)≤f(x), ∀x∈A
- Gradient Descent (GD)
- Stochastic Gradient Descent (SGD)
- Gradient Descent with Momentum (Momentum)
- Adaptive Gradient Algorithm (AdaGrad)
- Adaptive Moment Estimation (Adam)
- Newton's methods
- Quasi-Newton (BFGS)
이외에도 다양한 알고리즘 존재
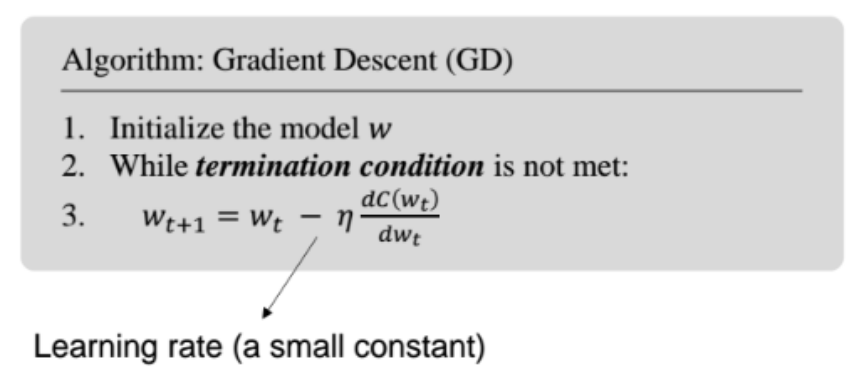
Gradient Descent
dwdC(w)=n1X(Xw−y), n2가 맞는 표현이지만 step size(η)를 통해 n1로 대체
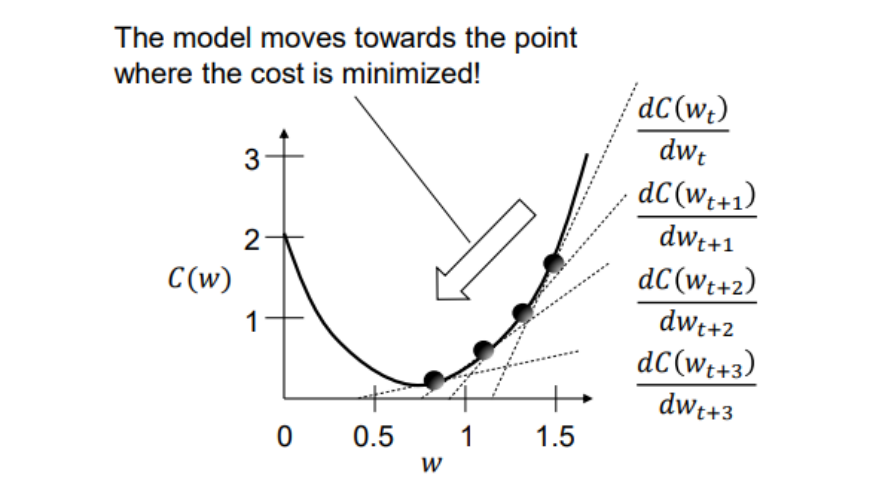
- 머신러닝, 신호처리, 통계학 등 다양한 분야에서 널리 사용되는 최적화 알고리즘
- 비용 함수(cost function)를 최소화하기 위해 파라미터를 점진적으로 업데이트
- 손실 함수의 수렴(convergence)을 보장(guarantee)
- 특히, 볼록 함수(convex function)의 경우 전역 최적해(Global minimum)에 도달 가능
Learning Rate (Step Size)
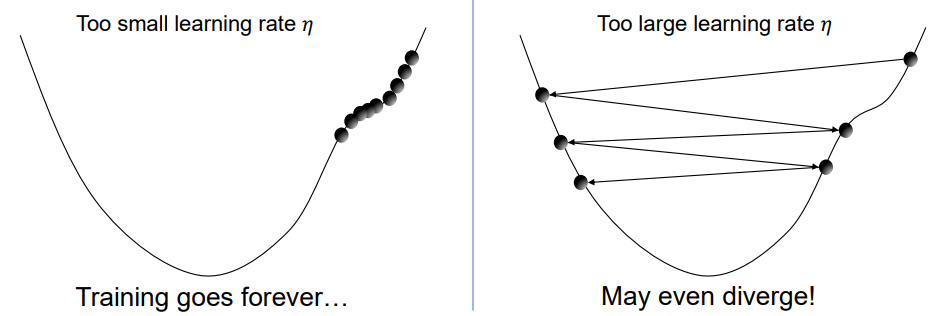
- 학습률 η는 경사 하강법에서 파라미터를 얼마나 업데이트할지를 결정하는 요소
- 일반적으로는 학습률 스케줄링 또는 적응형 옵티마이저(예: Adam)를 활용
Closed From Solutuion
C(w)=n1(Xw−y)⊤(Xw−y)∝w⊤X⊤Xw−2w⊤X⊤y+y⊤y
dwdC(w)=dwd(w⊤X⊤Xw−2w⊤X⊤y+y⊤y)=0
⇔2X⊤Xw−2X⊤y=0⇔X⊤Xw=X⊤y
w=(X⊤X)−1X⊤y
- 수학적으로 정확한 해를 계산
- (X⊤X)가 비가역행렬이라면 의사역행렬(pseudo-inverse) 사용
- 시간 복잡도가 O(n3)이기에 고차원 데이터에 적용 어려움
반면, GD는 (X⊤X)를 직접 계산하지 않기에 고차원 데이터에 적용 가능
X∈Rn×d, W∈Rd×1이므로 미분의 시간복잡도는 O(nd)
Logistic Regression
- 분류 문제를 위한 확률 기반 모델
- Sigmoid 함수를 사용해서 출력을 스쿼싱(squashing)함
- f(x)=σ(w⊤x)=1+e−w⊤x1
- p(y=1∣x;w)≈f(x)
- p(y=0∣x;w)≈1−f(x)
- f(x)≥0.5→y=1
- f(x)<0.5→y=0
f(x)=1+e−w⊤x1는 non-convex
이를 해결하기 위해 Maximum Likelihood Estimation 도입
Maximum Likelihood Estimation (MLE)
wMLE=argmaxw∑i=1nlog p(yi∣xi;w)
= argmaxw∑i=1nlog (p(yi=1∣xi;w)yi⋅(1−p(yi=1∣xi;w)1−yi))
= argmaxw∑i=1n[yilog p(yi=1∣xi;w)⋅(1−yi)log(1−p(yi=1∣xi;w))]
(Probability mass function of a Bernoulli distribution)
C(w)=−∑i=1n[yilog f(xi)⋅(1−yi)log(1−f(xi))]
(Binary Cross Entropy)
dwdC(w)=n1∑i=1n[(f(xi)−yi)xi]
(MSE Cost Function의 미분 결과와 유사)
계산의 편의를 위해 상수는 고려하지 않음
이후, GD를 통해 파라미터 업데이트
Muiti-Class Logistic Regression
- f(x)=σ(w⊤x)=∑c=1Cexp(wc⊤x)exp(wc⊤x)
- p(y=c∣x;w1,w2,...,wc)≈f(x)
- C(w)=−∑i=1n∑c=1Cycilog fc(xi)
- ∂wc∂C(w)=n1∑i=1n(fc(xi)−yci)xi
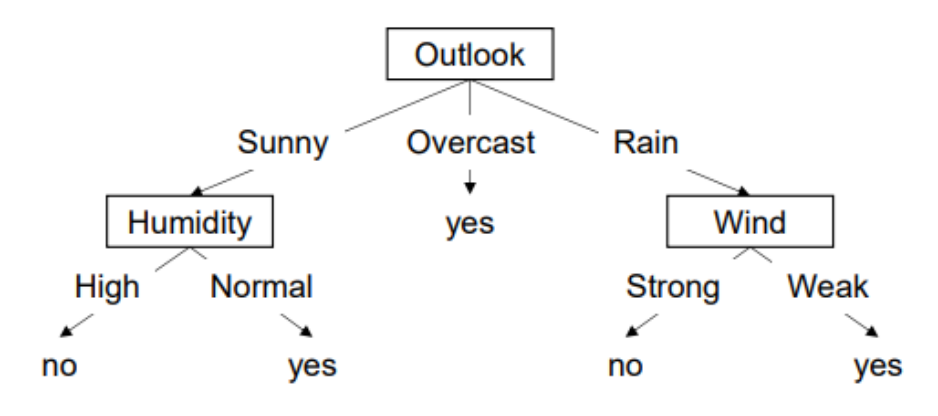
Decision Tree
- 데이터로부터 의사 결정 규칙(decision rules)을 학습하여 예측 수행
- Non-parametric, supervised learning
- 분류(Classification)와 회귀(Regression) 모두에 사용 가능
- Feature scaling 불필요
- Internal Node: 특정 속성(변수)을 테스트하는 노드
- Branch: 테스트 결과(속성 값)에 따른 경로
- Leaf Node: 최종 예측값
- ex) yes / no 또는, p(y∣x∈leaf)
Algorithm
- CART (Classification and Regression Trees)
- ID3 (Iterative Dichotomister 3)
- C4.5
- CHAID (Chi-squared Automatic Interaction Detection)
ID3에 대해 다룰 예정
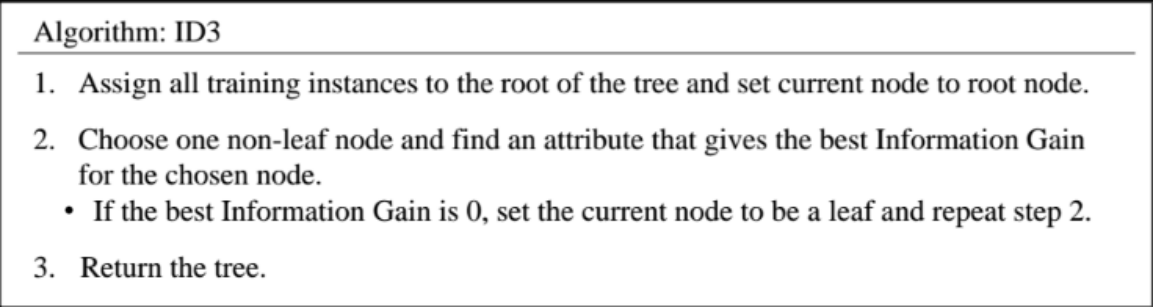
Iterative Dichotomister 3 (ID3)
- 결정 트리를 구성하는 탑다운(top-down) 방식의 탐욕적(greedy) 알고리즘
- 각 단계에서 가장 Information Gain이 큰 속성을 선택해 트리를 분할
- 순도 높은 집합으로 분리하므로, 더 적은 깊이로 leaf에 도달하는 구조를 유도
Entropy (Impurity)
- 랜덤 변수 𝑥의 정보량(uncertainty, 불확실성)의 평균
- H(x)=−∑i=1np(x=i)log2p(x=i)
정보 이론에서는 정보의 불확실성이나 무질서도를 측정하는 지표
최적 부호화를 위해 필요한 평균 비트 수를 의미
평균 부호 길이: ∑i=1np(x=i)−log2p(x=i)
자연계는 엔트로피가 높음
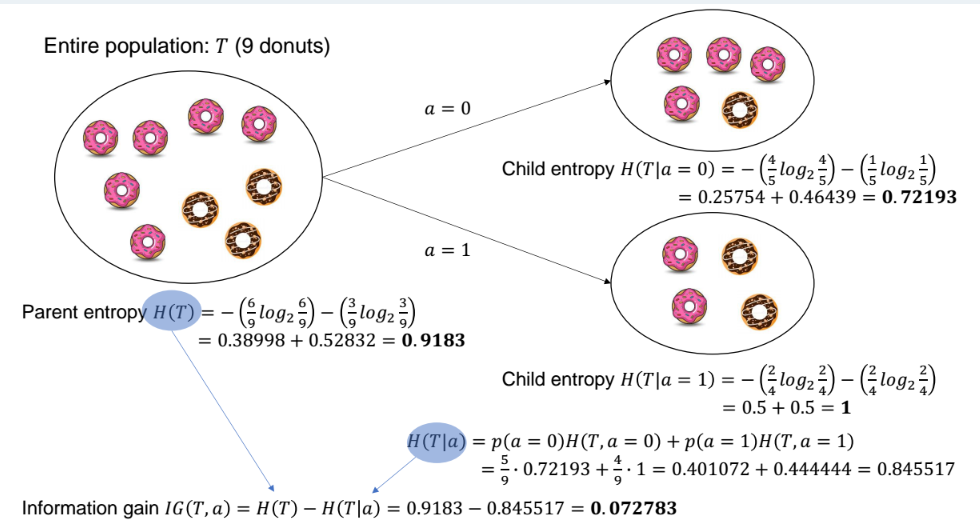
- 데이터를 어떤 feature로 분할했을 때 Entropy가 얼마나 줄어드는지를 측정
- IG(T,a)=H(T)−H(T∣a)
- H(T∣a)=∑v∈values(a)p(a=v)⋅H(Sa(v))
- Sa(v)= {x∈T∣xa=v}
장점
- 자동적이며 체계적인 노드 분할이 가능
- 모든 노드에서 엔트로피를 최소화하는 방향으로 트리를 구성
단점
- 많은 고유값을 가지는 속성에 의존 -> Fat Tree
- ex) 고객 패턴 분류 시, 수많은 고유값을 가진 고객 ID를 기준으로 분할
- 고유값이 많다고 해서 유익한 정보라고 보장할 수 없음
이를 개선하기 위해 Infromation Gain Ratio (IGR) 도입
- IG를 각 속성의 분할 정보(Split Information)로 정규화함으로써 공정성을 확보
- IGR(T,a)=SplitInfo(T,a)IG(T,a)
- SplitInfo(T,a)=−∑v∈values(a)∣T∣∣Tv∣log2∣T∣∣Tv∣
SplitInfo(T,a)=−(95log295+94log294)=0.99085
IGR(T,a)=SplitInfo(T,a)IG(T,a)=0.990850.072783≈0.07345
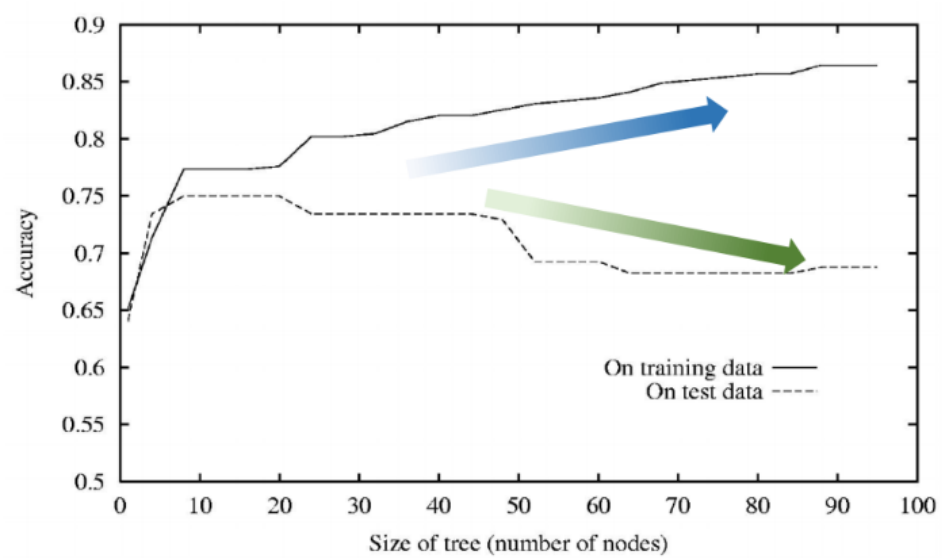
Overfitting
- 모델이 학습 데이터에는 정확히 맞추지만, 새로운 데이터에는 잘 일반화하지 못하는 현상
- 결과적으로 training accuracy는 높지만, validation accuracy는 낮음
- Training data: errortrain(h)
- Entire distribution D of data: errorD(h)
- errortrain(h)<errortrain(h′) and errorD(h)>errorD(h′)
발생 원인
- 훈련 데이터 양이 부족하거나, 데이터가 전체 분포를 충분히 대표하지 못함
- 노이즈가 많은 데이터가 포함되어 있음 → 모델이 의미 없는 패턴까지 학습
- 특정 데이터셋에 대해 너무 오랫동안 학습
- 모델의 복잡도가 너무 높음 → 노이즈까지 학습함
해결 방법
- 더 많은 양질의 데이터 수집
- 데이터 정제
- 모델이 훈련 데이터에 완벽하게 맞추기 전에 학습을 멈추기
- 학습 후 가지치기(pruning)를 수행
- Reduced-Error Pruning: 검증 데이터 기준으로 가지 제거
- Rule Post-Pruning: 생성된 규칙을 간단히 다듬는 방식
Reduced-Error Pruning
- 데이터를 훈련셋과 검증셋으로 분리
- 훈련 데이터를 이용해 전체 트리 생성
- 트리를 아래에서 위로(bottom-up) 탐색하면서
- 각 노드를 제거해보고
- 제거 후의 검증 정확도를 측정
- 정확도가 유지되거나 향상된다면 해당 노드를 제거
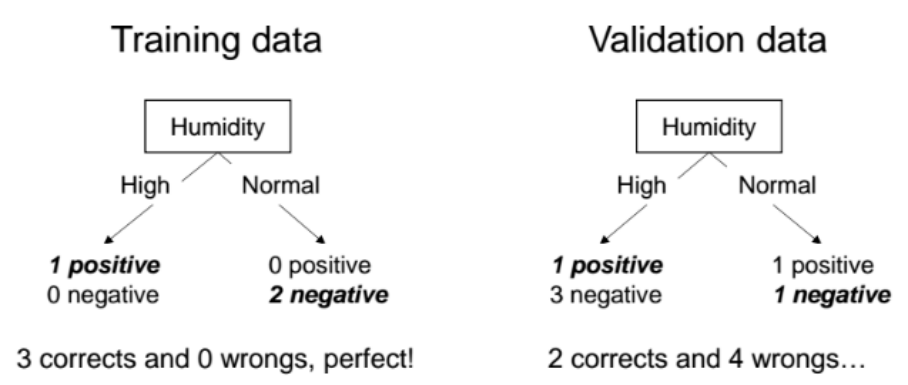
이 경우 Humidity 노드를 제거하고 leaf 노드(negative)로 대체하면 4 corrects and 2 wrongs
즉, Humidity 노드를 제거함으로써 검증 정확도 향상
Why Might Predictions be Wrong?
True Non-determinism (비결정성)
- 동전을 던지면 결과는 확률적임
- p(heads)=θ라는 확률을 모델이 추정
- 머신러닝은 관측값으로부터 학습한 뒤, 기대값 측면에서 최선을 다하길 바라는 것
Partial Observability (부분 관측성)
- 예측에 필요한 정보가 관측된 x에 포함되어 있지 않거나 일부만 포함될 수 있음
Representational Bias (표현 편향)
- 적절한 특징(x) 선택이 중요
- 현재 특징만으로는 분리가 어려울 수 있음
SVM (Support Vector Machine)
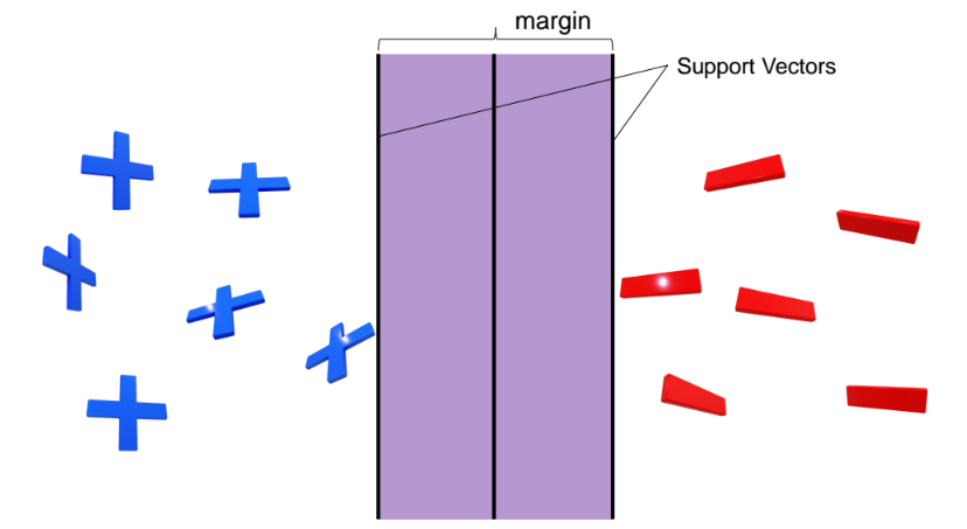
- 고차원 공간에서 데이터 포인트들을 명확히 분류하는 초평면(hyperplane) 을 찾는 것
- 두 클래스 사이의 margin(마진) 을 최대화(maximize)
- 즉, 각 클래스와 결정 경계 간의 최소 거리를 가장 크게 만드는 것이 목표
장점
- Versatile
- 분류(classification)와 회귀(regression) 문제 모두에 사용 가능
- Linearity
- 커널 트릭(Kernel Trick)을 통해 비선형 문제도 선형적으로 다룰 수 있음
- Well-Studied
- Robust
- 데이터가 적거나 노이즈가 많아도 상대적으로 좋은 성능을 보임
Decision Rules
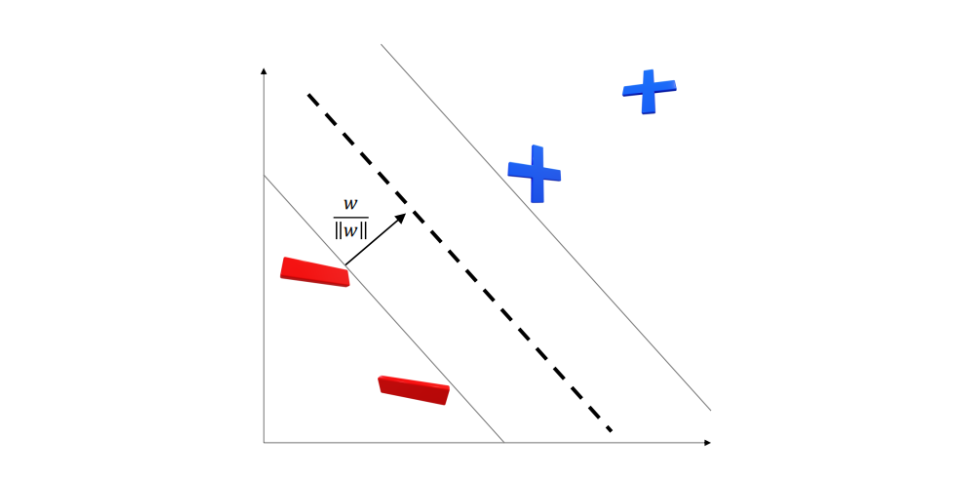
- yi(w⋅xi+b)≥1, yi∈ {−1,1}
- width=∣∣w∣∣2→min21∣∣w∣∣2, Subject to yi(w⋅xi+b)−1≥0, i=1,2,...,n
- L(w,b,α)=2∣∣w∣∣2−∑i=1nαi(yi(wTxi+b)−1)
- Subject to αi≥0, i=1,2,...,n
- minw,bL(w,b,a)
이후 Lagrangian Primal-Dual을 통해 최적의 αi 도출
w=∑αiyixi, 이를 yi(w⋅xi+b)−1=0에 대입하여 b 도출
이렇게 도출된 w와 b는 마진의 최대화를 보장
Complementary Slackness Condition
αi(yi(w⋅xi+b)−1=0), αi≥0
- Support Vector
- yi(w⋅xi+b)−1=0
- αi=0
- 경계에 위치한 점
- Internal Point
- yi(w⋅xi+b)−1=0
- αi=0
- 여유 있게 잘 분류된 점
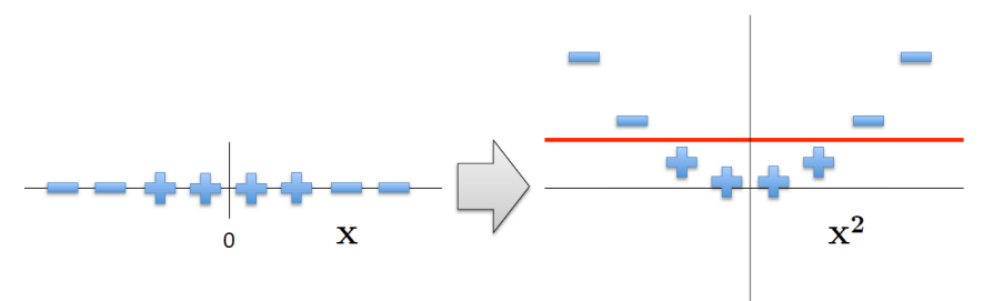
Kernel Method
- 커널 함수는 어떤 고차원 feature space에서의 inner product를 의미
- 어떤 함수가 symmetric하고 positive semi-definite이면 유효한 커널 함수
- K(xi,xj)=ϕ(xi)Tϕ(xj)=xiTATAxj
- K(u,v)=(u⋅v)d
- K(u,v)=(u⋅v+1)d
- K(u,v)=tanh(u⋅v+1)d
- K(u,v)=exp(−2σ2∣∣u−v∣∣2)
Kernel Trick
고차원 맵핑을 하지 않아도 마치 고차원 공간에서 작동하는 것처럼 구현 가능
K(xi,xj)=<xi,xj>2=(xi1xj1+xi2xj2)2=(xi12xj12+xi22xj22+2xi1xi2xj1xj2)
= <Φ(xi),Φ(xj)>, Φ(xi)=(xi12,xi22,√2xi1xi2), Φ(xj)=(xj12,xj22,√2xj1xj2)
Soft-Margin SVM
min21∣∣w∣∣2+C∑i=1nξi, Subject to yi(w⋅xi+b)−1≥0, i=1,2,...,n
Complementary Slackness Condition
αi(yi(w⋅xi+b)−1+ξi=0), αi=C−γi, γiξi=0
- Support Vector
- yi(w⋅xi+b)−1=0
- 0<αi<C, γi>0, ξi=0
- 경계에 위치한 점
- Internal Point
- yi(w⋅xi+b)−1=0
- αi=0, γi=C, ξi=0
- 여유 있게 잘 분류된 점
- Beyond Margin
- αi(yi(w⋅xi+b)−1+ξi)=0
- αi=C, γi=0, ξi>0
- 마진을 침범한 데이터(오분류)
