3. 저주파 통과 필터
(low-pass filter)
: 저주파 신호는 통과시키고 고주파 신호는 걸러내는 필터
- 잡음 제거용으로 많이 사용
- 이때 측정하려는 신호가 대개 저주파이고, 잡음은 고주파 성분으로 되어 있기 때문
저주파 통과 필터 중 가장 간단한 1차(first order) 저주파 통과 필터를 살펴보자!
3-1) 이동평균의 한계
이동평균 필터를 실제로 사용해보면, 잡음을 제거하면서 변화 추이를 반영하는 게 쉽지 않다.
🤔 왜 그럴까?
먼저 이동평균 정의를 별도의 항으로 풀어써보자.
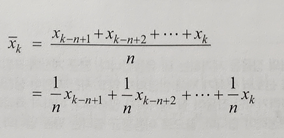
위의 식을 보면 모든 데이터에 동일한 가중치(1/n)을 부여한다. 가장 최근의 데이터(x_k)와 가장 오래된 데이터(x_k-n+1)를 같은 비중으로 평균에 반영하는 것!
➡️ 이동평균 필터를 변화가 심한 신호에 적용하면, 잡음 제거와 변화 민감성을 동시에 달성하기 어렵다.
따라서 이동평균 필터의 장점과 한계를 정확히 알고 적재적소에 적용하는 것이 중요!
3-2) 1차 저주파 통과 필터
이동평균 필터의 단점을 보완하기 위해 최근 측정값에는 높은 가중치를 주고, 오래된 값일수록 가중치를 낮게 주는 방법을 시도해보자!
1차 저주파 통과 필터의 재귀식

1장) 재귀 필터 - 1. 평균 필터가 위와 같은 형태였다.
- 평균 필터는 α를 임의로 지정할 수 없고, 데이터 개수에 따라 값이 결정된다는 점이 위의 식과 달랐다.
- 하지만 저주파 통과 필터의 왼쪽항은 평균과는 전혀 관련 X
➡️ 평균 대신에추정값(estimated value)이라고 부르자!
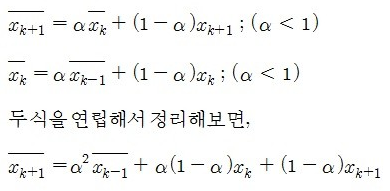
0<α<1이기 때문에 α(1-α) < (1-α)
➡️ 즉, 최근 측정값(x_k)이 이전 측정값(x_k-1)보다 더 큰 가중치를 부여 받아 추정값에 반영되고 있음을 알 수 있다.
저주파 통과 필터는 오래된 측정값일수록 더 작은 가중치를 부여하는 필터라는 것을 증명했다.
➡️ 이러한 가중치 차별화 덕분에 저주파 통과 필터는 잡음 제거와 변화 민감성이라는 상충되는 요구를 이동평균 필터보다 더 잘 충족시킨다. 또한 공식도 더 간단하다.
1차 저주파 통과 필터를 지수 가중(exponentially weighted) 이동평균 필터라고도 부른다.
오래된 데이터일수록 기하급수적으로 가중치를 낮게 부여하여 이동평균을 계산한다는 의미!
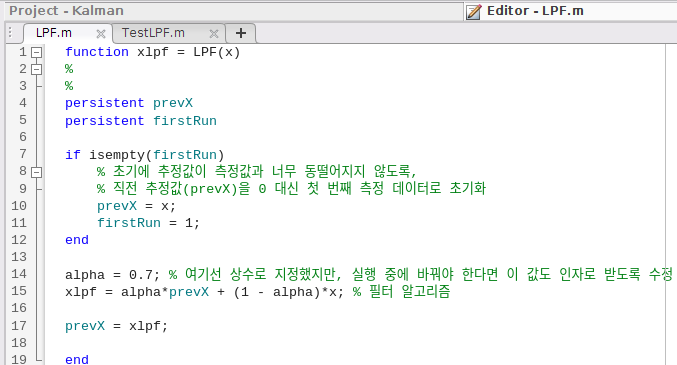
3-3) 저주파 통과 필터 함수
LPF(x)라는 1차 저주파 통과 필터 함수는 측정 데이터(x)를 받아 추정값을 반환한다.
3-4) 예제: 초음파 거리계
앞 장의 이동평균 필터와 동일한 예제를 통해 저주파 통과 필터의 성능을 검증해보자!
- 이동평균 필터 함수(MovAvgFilter) 대신 저주파 통과 필터 함수(LPF)를 호출하는 것 말고는 동일
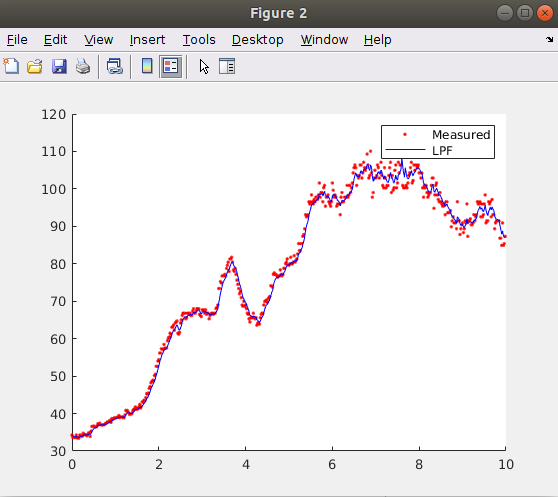
위는 저주파 통과 필터의 추정값과 측정 데이터를 비교한 그래프이다.
- 그래프를 보면 측정 데이터의 잡음이 잘 제거되었고, 고도 변화 추이도 잘 나타나 있다.
하지만 모든 경우에서 항상 저주파 통과 필터가 이동평균 필터보다 시간 지연이 적은 것은 아니다.
➡️ 측정 데이터의 특성에 알맞게 α를 선정했는지가 중요!
1차 저주파 통과 필터의 α는 이동평균 필터의 데이터 개수(n)와 비슷한 역할을 해서, 이 값으로 잡음 제거와 변화 추종 성능을 절충할 수 있다.
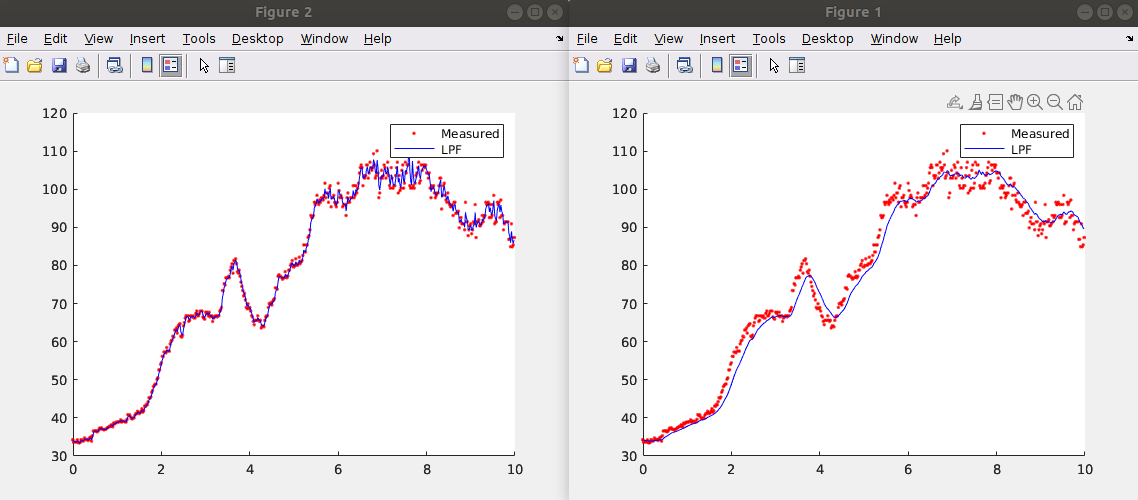
α에 따라 1차 저주파 통과 필터의 추정값이 어떻게 바뀌는지 살펴보자!
위 그림의 왼쪽은 α=0.4, 오른쪽은 α=0.9일 때의 추정값을 나타낸 그래프이다.
=> α가 작은 값으면 잡음이 더 많고, α가 크면 잡음은 줄어드는 대신 시간 지연이 더 커졌다.
🤔 왜 그럴까?

1차 저주파 통과 필터 수식을 보면 α가 작으면 1-α가 상대적으로 더 커진다.
➡️ 추정값 계산에 측정값이 더 많이 반영되는 것
➡️ 잡음 제거보다 측정값의 변화에 더 민감해진다.
정리
- 1차 저주파 통과 필터의 수식은 매우 간단해서 구현이 쉽다.
- 이동평균 필터와 달리, 최신 측정값일수록 가치를 높게 주는 좋은 특성을 가졌다.
➡️ 측정 신호의 변화 추이를 이동평균 필터보다 더 잘 감지해낸다. - 1차 저주파 통과 필터는 지수 가중 이동평균 필터라고도 부른다.
참고)
이동평균의 한계 그림: 칼만 필터는 어렵지 않아 p.30
1차 저주파 통과 필터의 재귀식 그림
