ROS란?
ROS is an open-source, meta-operating system for your robot. It provides the services you would expect from an operating system, including hardware abstraction, low-level device control, implementation of commonly-used fuctionality, message-passing between processes, and package management. It also provides tools and libraries for obtaining, building, writing, and running code across multiple computers.
참고: http://www.ros.org/wiki/
소프트웨어 프레임워크

- 로봇 소프트웨어를 개발하기 위한 소프트웨어 프레임워크
- 노드간에 메시지 교환 방법으로 복잡한 프로그램을 잘게 나눠 공동 개발이 가능
- 명령어 도구, 시각화 도구 Rviz, GUI 도구 모음, rqt, 3차원 시뮬레이터 Gazebo 지원
- 로보틱스에서 많이 사용되는 모델링, 센싱, 인식, 내비게이션, 매니퓰레이션 기능 지원
- 로보틱스 생태계 생성!
ROS의 진정한 목적
📍로보틱스 소프트웨어 개발을 전세계 레벨에서 공동 작업 가능하도록 생태계를 구축하는 것!!
ROS는 새로운 운영 체제인가?
엄밀하게 말해서 운영체제는 아님!
운영 체제 (Operating System)
- 범용 컴퓨터
- Windows(Windows XP, 7, 8 ...)
- Linux(Ubuntu, Redhat, Fedora, Mint, Gentoo ...)
- MAC(OS X ...) 등
- 스마트폰
- Android, iOS, Windows Phone, Symbian, RiMO, Tizen 등
ROS (Robot Operating System)
- ROS는 "메타운영체제(Meta-Operating System)"이다.
📌메타운영체제
-
정확히 정의된 용어는 아니지만, 어플리케이션과 분산 컴퓨팅 자원간의 가상화 레이어로 분산 컴퓨팅 자원을 활용하여, 스케쥴링 및 로드, 감시, 에러 처리 등을 실행하는 시스템
-
즉, 윈도우/리눅스/안드로이드와 같은 전통적인 운영체제는 아님. 오히려 ROS는 기존의 전통적인 운영체제(리눅스, 윈도우즈, OS-X, 안드로이드)를 이용
-
기존 운영체제의 프로세스 관리 시스템, 파일 시스템, 유저 인터페이스, 프로그램 유틸(컴파일러, 스레드 모델 등)을 사용하고 있다. 이에 추가적으로 다수의 이기종 하드웨어간의 데이터 송수신, 스케쥴링, 에러 처리 등
로봇 응용 소프트웨어 개발을 위한필수 기능들을 라이브러리 형태로 제공 -
로봇 소프트웨어 프레임워크를 기반으로 다양한 목적의 응용 프로그램을 개발, 제공하고 있으며 유저들이 개발한 패키지 또한 유통하는생태계(echosystem)을 갖추고 있음
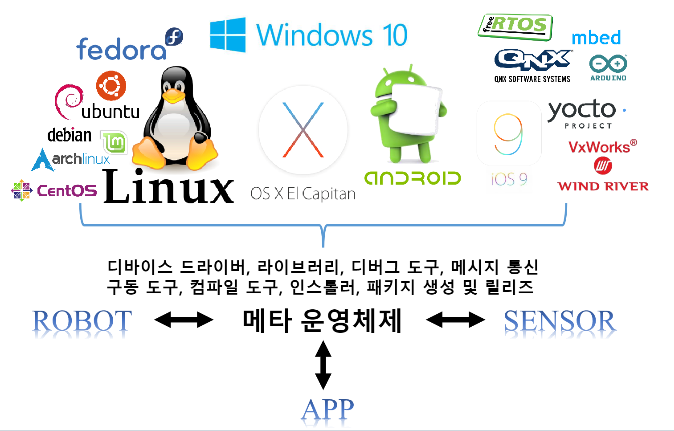
스마트폰과 달리 로봇은 하드웨어가 엄청 다양하기 때문에 하나의 OS가 각기 다른 요구사항을 만족할 수 없음!
➡️ 그래서 원하는 하드웨어에 원하는 OS를 설치한뒤, ROS를 추가적으로 설치해서 쓰는 메타운영체제 형태가 로봇 소프트웨어 플랫폼에 유리
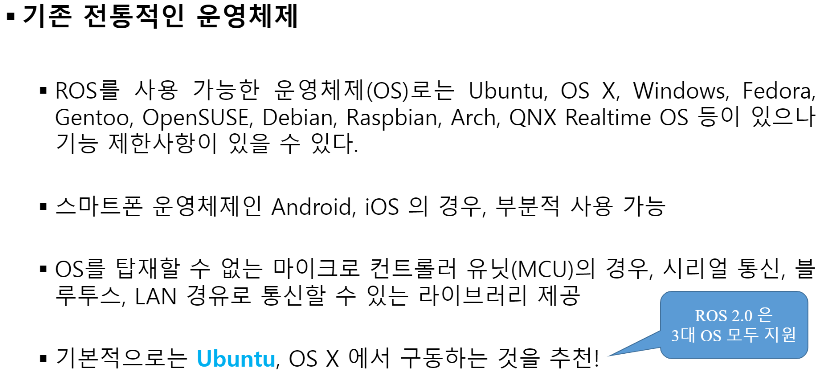
ROS를 사용 가능한 운영체제
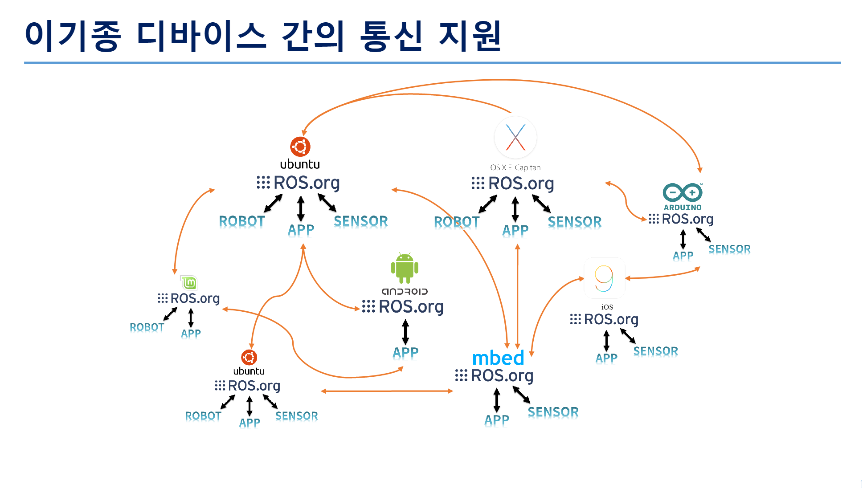
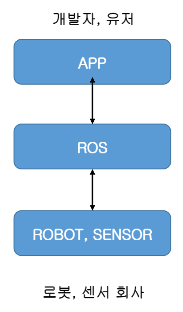
ROS의 생태계
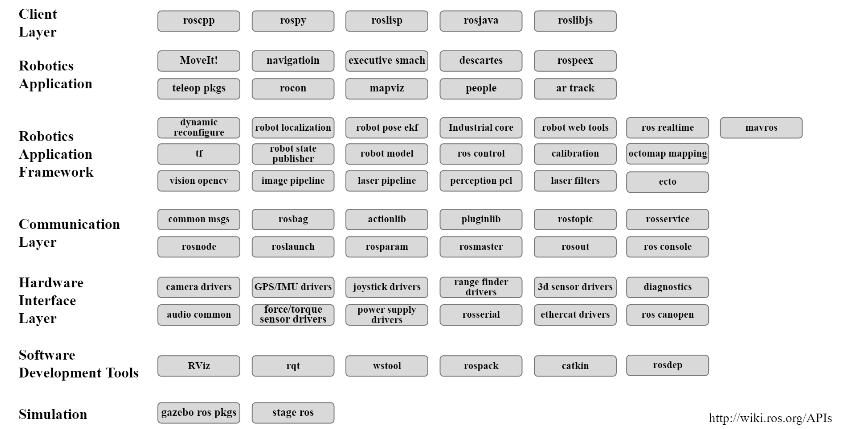
ROS의 구조
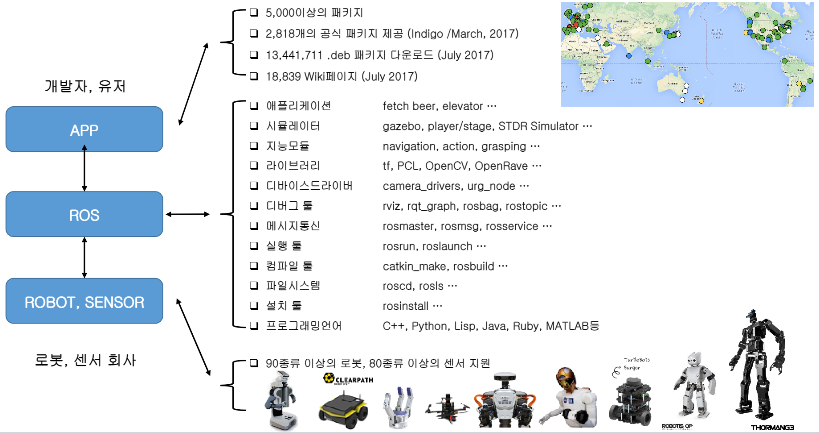
ROS의 생태계
현재의 ROS 생태계
로봇 운영체제 ROS 특징
1) 통신 기능
- 노드 간 데이터 통신을 제공
- 통상적 미들웨어로 지칭되는 메시지 전달 인터페이스 지원
-
메시지 파싱 기능
- 로봇 개발 시에 번번히 사용되는 통신 시스템 제공
- 캡슐화 및 코드 재사용을 촉진하는 노드들 간의 메시지 전달 인터페이스
-
메시지의 기록 및 재생
- 노드 간 송/수신되는 데이터인 메시지를 저장하고 필요시에 재사용 가능
- 저장된 메시지를 기반으로 반복적인 실험 가능, 알고리즘 개발에 용이함
-
메시지 사용으로 인한 다양한 프로그래밍 언어 사용 가능
- 노드 간의 데이터 교환이 메시지를 사용하기 때문에 각 노드는 서로 다른 언어로 작성 가능
- 클라이언트 라이브러리: roscpp, rospy, roslisp, rosjava, roslua, roscs, roseus, PhaROS, rosR
-
분산 매개 변수 시스템
- 시스템에서 사용되는 변수를 글로벌 키값으로 작성하여 공유 및 수정하여 실시간으로 반영
2) 로봇 관련 다양한 기능
-
로봇에 대한 표준 메시지 정의
- 카메라, IMU, 레이저 등의 센서 / 오도메트리, 경로 및 지도 등의 내비게이션 데이터 등의 표준 메시지를 정의하여 모듈화, 협업 작업을 유도, 효율성 향상
-
로봇 기하학 라이브러리
- 로봇, 센서 등의 상대적 좌표를 트리화 시키는 TF 제공
-
로봇 기술 언어
- 로봇의 물리적 특성을 설명하는 XML 문서 기술 -
진단 시스템
- 로봇의 상태를 한눈에 파악할 수 있는 진단 시스템 제공
-
센싱/인식
- 센서 드라이버, 센싱/인식 레벨의 라이브러리 제공
-
내비게이션
- 로봇에서 많이 사용되는 로봇의 포즈(위치/자세) 추정, 지도내의 자기 위치 추정 제공
- 지도 작성에 필요한 SLAM, 작성된 지도 내에서 목적지를 찾아가는 Navigation 라이브러리를 제공
-
매니퓰레이션
- 로봇 암에 사용되는 IK, FK는 물론 응용단의 Pick and Place를 지원하는 다양한 Manipulation 라이브러리 제공
- GUI 형태의 매니퓰레이션 Tools 제공(MoveIt!)
3) 다양한 개발 도구
- 로봇 개발에 필요한 다양한 개발 도구를 제공
- 로봇 개발의 효율성 향상
-
Command-Line Tools
- GUI 없이 ROS에서 제공되는 명령어로만 로봇 액세스 및 거의 모든 ROS 기능 소화
-
RViz
- 강력한 3D 시각화를 제공
- 레이저, 카메라 등의 센서 데이터를 시각화
- 로봇 외형과 계획된 동작을 표현
-
RQT
- 그래픽 인터페이스 개발을 위한 Qt 기반 프레임 워크 제공
- 노드와 그들 사이의 연결 정보 표시(rqt_graph)
- 인코더, 전압, 또는 시간이 지남에 따라 변화하는 숫자를 플로팅(rqt_plot)
- 데이터를 메시지 형태로 기록하고 재생(rqt_bag)
-
Gazebo
- 물리 엔진을 탑재, 로봇, 센서, 환경 모델 등을 지원, 3차원 시뮬레이터
- ROS와의 높은 호환성
자세한 내용은 아래의 6강에서 다룸
https://velog.io/@bbirong/6.-ROS-%EB%8F%84%EA%B5%AC
버전 선택
- 5년 지원 약속된 최신 LTS 버전의 우분투 선택
- 2년마다 LTS 버전 릴리즈, 매년 4월
- 우분투 릴리즈된 후 3개월 후
- 최신의 LTS 지원 ROS 버전
- 단, ROS는 릴리즈된 후 3개월 후
- Gazebo "gazebosim.org" 정보 확인 후 사용
