ROS 로봇 프로그래밍 강의
1.1. 로봇 소프트웨어 플랫폼

✔️ 다양한 하드웨어의 결합이 가능한 하드웨어 모듈✔️ 운영 체제 + 애플리케이션하드웨어 모듈 + 운영체제 + 앱(서비스) + 유저 ➡️ echo system의 4대 요소"보이지 않는 생태계 속의 분업"하드웨어 인터페이스 통합하드웨어 추상화/규격화/모듈화가격↓, 성능↑
2.2. 로봇 운영체제 ROS

ROS is an open-source, meta-operating system for your robot. It provides the services you would expect from an operating system, including hardware ab
3.3. ROS 개발환경 구축

ROS 1줄 설치 $ wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotistools/master/installroskinetic.sh && chmod 755 ./installroskinetic.sh && bash ./
4.4. ROS의 중요 컨셉
Node최소 단위의 실행 가능한 프로세서하나의 실행 가능한 프로그램ROS에서는 최소한의 실행 단위로 프로그램을 나누어 작업각 노드는 메시지 통신으로 데이터를 주고 받음Package하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어 놓은 것패키지의 묶음을 메타패키지라
5.5. ROS 명령어
ROS cheatsheethttps://github.com/oroca/oroca_ros_tutorials/raw/master/ROScheatsheet_indigo_catkin.pdf참고)강의: https://www.youtube.com/watch?v=
6.6. ROS 도구
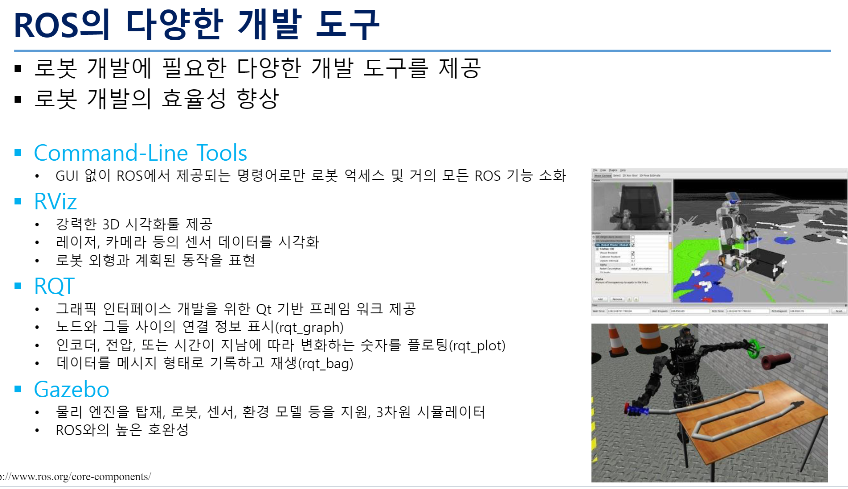
RViz를 이용하면 센서 및 로봇 관련 "데이터 시각화"가 매우 간단!RQT를 이용하면1\. GUI 형태로 ROS 이용 가능2\. GUI Tool 제작이 간단!"시뮬레이션"이 필요하다면 ROS와 연동하기 쉬운 Gazebo 사용!참고)강의: https://www
7.7. ROS 기본 프로그래밍
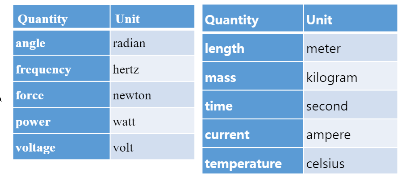
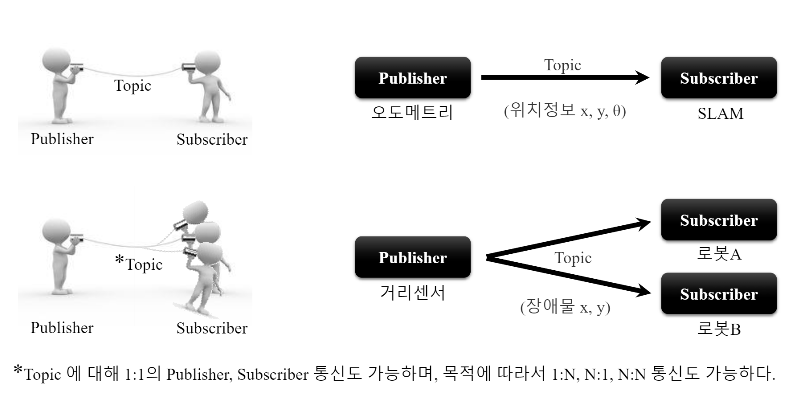
표준 단위SI 단위 사용좌표 표현 방식x: forward, y: left, z: up 오른손 법칙(반시계 방향이 +)프로그래밍 규칙단방향 통신일 때 Topic이라는 메시지 통신 사용송신 측을 Publisher, 수신 측을 Subscriber라고 부름1) 패키지 생
8.8. 로봇, 센서, 모터
아래의 사이트에 들어가서 확인하면 된다.http://robots.ros.org/아래의 사이트에 들어가서 확인하면 된다.http://wiki.ros.org/Sensors1D Range Finders저가의 로봇을 만들 때 사용할만한 적외선 방식의 직선거리
9.9. 임베디드 시스템
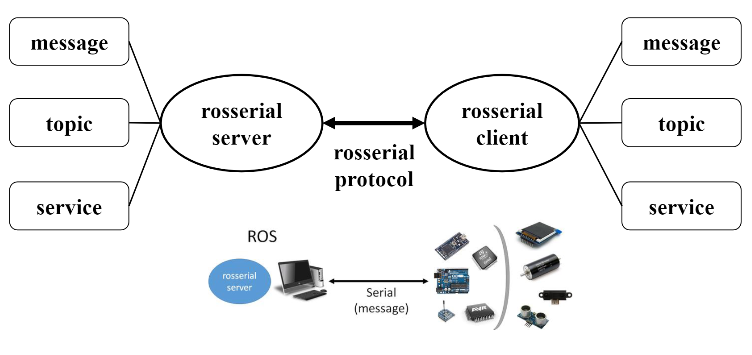
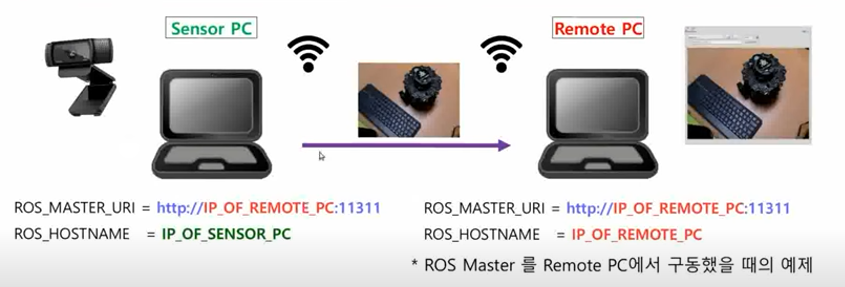
PC와 제어기 간의 메시지 통신을 위해 중계자 역할을 수행하는 ROS 패키지예) 제어기 ➡ 시리얼(rosserial 프로토콜) ➡ PC(ROS 메시지로 재전송)예) 제어기 ⬅ 시리얼(rosserial 프로토콜) ⬅ PC(ROS 메시지를 시리얼로 변경)$ sudo apt
10.[ROS] 11. SLAM과 내비게이션
SLAM (Simultaneous Localization and Mapping)