논문 제목 : Fast R-CNN
논문 링크 : https://arxiv.org/pdf/1504.08083.pdf
이번에 리뷰할 논문은 Fast R-CNN이다.
논문 제목이 곧 모델명.. ㅋㅋㅋ 단순하지만 강렬하다.
기존의 R-CNN이 상당히 느리다는 단점이 있다.
GPU로 13초, CPU로 53초.. 실시간은 어림도 없고, 이미지 100장만 분석해도 1300초가 걸린다!
또 기존 모델은 linear SVM, AlexNet(CNN), Bounding Box regressor 3개를 학습시켜야 해서 비효율적이다.
따라서 이러한 단점들을 개선한 것이 이번 Fast R-CNN이다.
한 번 살펴보자!
[후기]
생각보다 술술 읽혀서 좋은 논문이다.
구조도 깔끔하고, 단어 선택도 잘 되어있어 읽기 편했다.
마지막에 저자의 질문을 바탕으로 전개하는 방식이 좋았다.
피니시!
Abstract
기존의 R-CNN보다 학습 속도와 테스팅 속도, 그리고 인식 정확도를 개선했다.
그 결과, VGG16을 사용한 Fast R-CNN은 학습은 9배 빠르고, 테스트는 213배 빠르다.
SPPnet과 비교해보자면 학습은 약 3배, 테스트는 약 10배가 빠르다.
또한 PASCAL VOC 2012에서 가장 높은 mAP를 달성했다.
1. Introduction
이미지 분류에 비해 객체 인식은 더 어려운 문제이다.
그래서 기존의 방식들은 모델을 여러 단계에 걸쳐 학습했는데 이는 느리고 불편하다.
높은 난이도는 2가지 이유때문이다.
1) 객체 위치 후보를 만들어야 한다(이전 논문에서 '제안'이라고 한 것).
2) 이 rough한 위치 후보들로 '정확한' 위치를 찾아야 한다.
이 논문에서는 단일 단계 학습 알고리즘을 제안한다.
베이스 모델은 VGG16이다(R-CNN은 AlexNet).
그 결과 학습 속도는 R-CNN보다 9배 빠르고 SPPnet보다는 3배 빠르다.
실행 속도는 이미지 당 0.3초(객체 제안 시간 제외)로 최소 10초가 넘어간 R-CNN에 비해 상당한 개선이다.
mAP도 PASCAL VOC 2012 기준 66%를 달성했다(R-CNN은 62%).
1.1 R-CNN and SPPnet
R-CNN에는 세 가지 단점이 있다.
1) 학습이 multi-stage이다.
ConvNet, SVM, Bounding-box regressor 3개나 훈련시켜야 한다
2) 학습이 시간, 공간적으로 비효율적이다.
학습을 위한 feature는 추출되어 disk에 써지는데 수백 GB가 필요하고(공간),
이 과정들은 VGG16 기준 GPU로 2.5일 걸렸다(시간).
3) 객체 감지가 느리다.
VGG16 기준 GPU에서 이미지 당 47초나 걸렸다.
이를 보완하기 위해 SPPnet(Spatial pyramid pooling network)이 제안되었다.
이 모델은 계산을 공유함으로써 속도를 올렸다.
기존의 R-CNN이 후보 영역 얻기 -> CNN 학습 -> SVM의 단계를 거쳤다면,
SPPnet은 전체 이미지에서 feature를 얻고 이를 사용한다.
그 결과 약 학습은 3배, 테스트는 10~100배 빨라졌다.
다만 SPPnet도 여전히 단점이 있다.
1) 여전히 multi-stage를 학습한다.
2) Feature는 아직도 disk에 다 써야 한다.
3) Fine-tuning에서 CNN을 업데이트하지 않는데, 이는 오히려 성능에 제한을 준다.
1.2 Contributions
R-CNN과 SPPnet의 단점을 보완해 Fast R-CNN을 만들었다.
Fast R-CNN의 장점은 다음과 같다.
1) 높은 정확도(mAP)
2) 학습이 단일 단계이며, multi-task loss를 사용함
3) 학습이 모든 네트워크 layer를 업데이트함
4) Feature caching에 disk 공간이 필요없음
2. Fast R-CNN architecture and training
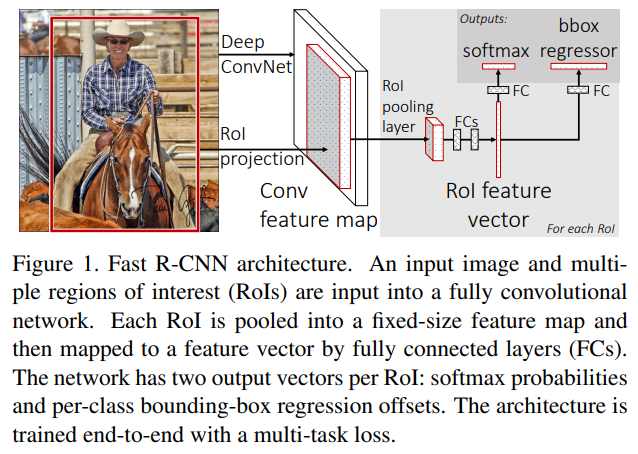
Fig. 1은 Fast R-CNN 구조를 보여준다.
전체 이미지를 input으로 받고 객체 위치를 제안한다.
네트워크는 먼저 conv를 통과시키고, max pooling을 해서 conv feature map을 생성한다.
그리고 각 객체 제안마다 RoI Pooling layer를 통해 고정된 길이의 feature vector를 추출한다.
각 feature vector는 FC layer로 들어가서 두 개의 output을 만든다.
1) K개의 객체 클래스 + 배경(총 K+1개)까지 해서 나올 softmax 확률
2) K개의 객체에 대한 4가지 숫자, 각 숫자는 bounding-box 위치를 의미함
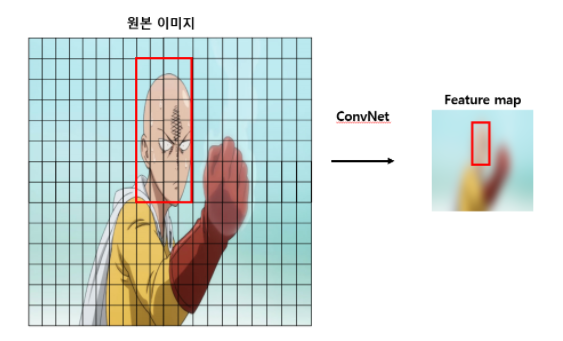
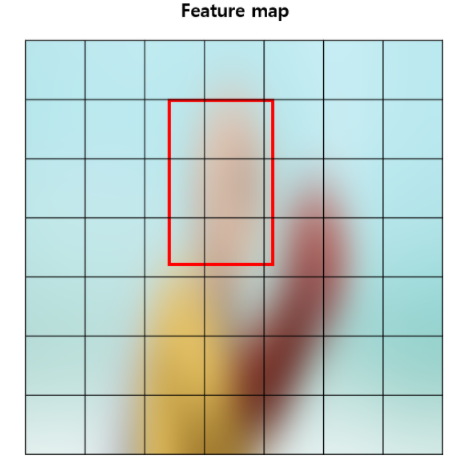
2.1 The RoI pooling layer
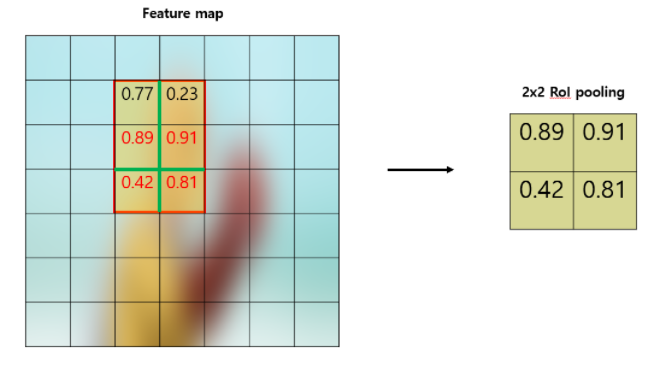
RoI pooling layer는 max pooling을 사용해 관심있는 영역을 작은 feature map으로 바꾼다.
이 영역은 고정된 크기인 H*W를 가지며, H와 W는 layer hyperparameter이다.
각 RoI는 (r, c, h, w)로 정의되며, (r, c)는 좌상단 좌표값, (h, w)는 높이와 너비이다.
RoI max pooling은 h*w(내가 관심있는 영역 너비, 높이)를 H*W(줄여야 하는 크기)로 만드는 것이다.
따라서 윈도우 사이즈는 대략 h/H * w/W가 된다.
아래 이미지를 보면 이해가 쉽다.
이미지 출처
RoI 참고 블로그1
RoI 참고 블로그2
RoI는 SPPnet의 spatial pyramid pooling layer의 특수 케이스로 볼 수 있다(오직 한 단계뿐인).
참고로 RoI에서 저렇게 어림짐작하여 발생하는 손실을 보완하기 위해
Mask R-CNN에서 RoI Align이 제안되었다.
2.2 Initializing from pre-trained networks
여기서는 3개의 사전학습된 ImageNet을 사용했다.
각각은 5개의 max pooling layer + 5~13개의 conv layer를 가지고 있다.
Fast R-CNN에 사용할 때, 사전학습된 네트워크는 세 가지의 변형을 거친다.
1) 마지막 max pooling layer는 RoI pooling layer로 교체된다.
크기는 네트워크의 첫 FC layer에 맞는 H, W로 구성된다(VGG16에서는 H=W=7).
2) 마지막 FC layer와 softmax는 앞서 말한 K+1 개의 softmax 확률과 bounding-box를 만드는 layer로 대체된다.
대체된 layer는 다음을 만든다(section 2 참고).
1) K개의 객체 클래스 + 배경(총 K+1개)까지 해서 나올 softmax 확률
2) K개의 객체에 대한 4가지 숫자, 각 숫자는 bounding-box 위치를 의미함
3) 네트워크는 이미지와 RoI를 input으로 받는다.
2.3 Fine-tuning for detection
SPPnet과 R-CNN의 역전파는 매우 비효율적이다.
왜냐하면 RoI를 다른 이미지에서 뽑았기 때문이다.
RoI는 때때로 무진장 커서 전체 이미지를 쓰기도 했기에, 엄청나게 느렸다.
128개의 RoI를 얻으려면 128장의 이미지를 쓴 것이다.
그러나 Fast R-CNN에서는 효율적인 학습을 위해 feature 공유를 했다.
N개의 이미지를 샘플링하고, 각 이미지에서 R/N개의 RoI를 샘플링했다.
만약 N=2, R=128이라면, 총 128개의 RoI를 위해 이미지는 2장만 필요하다!
이는 128장을 쓴 기존의 방식에 비해 거의 64배 빠르다.
한 이미지에서 뽑으면 연관되어 별로 좋지 않을까?
해보니 그렇지 않았다.
오히려 한 단계만에 softmax 분류기와 bb regressor를 학습할 수 있다. -> 효율적!
(RoI, SPPnet은 3단계에 걸쳐 학습)
Multi-task loss.
Fast R-CNN의 2가지 output은 다음과 같다(RoI 당).
1) 클래스 확률(총 K+1개)
2) Bounding-box
각 RoI는 ground-truth class u와 ground-truth bb regression target v를 기반으로 학습된다.
식은 다음과 같다.
어후 너무 복잡하다. 하나씩 살펴보자.
이는 실제 클래스 u에 대한 로그 손실이다.
여기서 는 아이버슨 괄호로, 참이면 1, 아니면 0을 반환한다.
u는 배경일 때 0이고 그 외에는 1보다 크다(=배경이 아니면 항상 1을 반환).
이는 bounding box에 대한 손실이다.
Smooth L1은 이상치에 대해 L2보다 덜 민감하다.
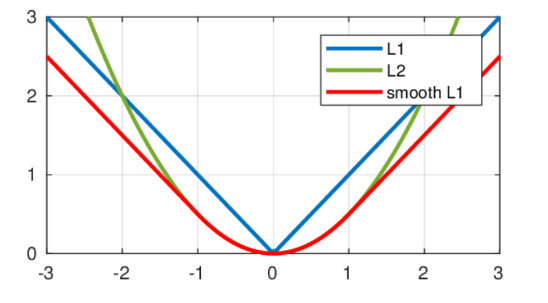
는 이 두 가지 손실을 조절해주는 역할로, 실험에서는 모두 1을 사용했다.
참고로 여기서 (ground-truth bounding box target)는 zero mean, unit variance를 가지도록 조정했다(아마도 실제값을 transform 시켜서 저렇게 만든듯).
Mini-batch sampling.
Fine-tuning 과정에서, 각 mini batch는 무작위로 고른 N=2개의 이미지로 구성된다.
R=128로, 한 이미지 당 64개의 RoI를 샘플링했다.
RoI 중, ground-truth와의 IoU가 0.5가 넘는 약 25%의 RoI만 물체로 선정했다().
[0.1, 0.5)의 IoU는 배경으로 처리했다(u=0).
데이터 증강은 좌우 대칭(50% 확률) 외에는 하지 않았다.
Back-propagation through RoI pooling layers.
하는 이유:
아니 매번 영역 크기가 다른데 어떻게 back propagation 해요 ㅋㅋ -> 합니다. 이미지 출처
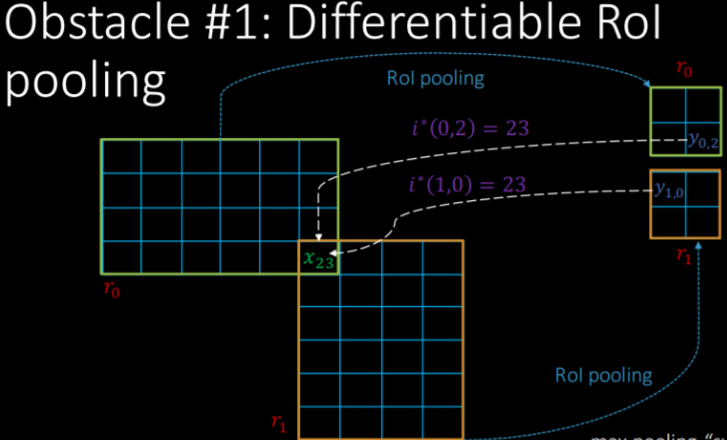
보면 하나가 여러개의 y에 영향을 줄 수 있다.
먼저 forward부터 보자( 계산).
간단함을 위해, N=1(이미지 수)이라 가정하겠다(N>1도 자명하다).
: RoI pooling layer의 i번째 activation input
: r번째 RoI로부터 온 layer의 j번째 output
RoI는 를 계산한다.
여기서 을 의미한다.
R(r, j)는 output이 인 subwindow 내의 index set이다.
즉 R(r, j) = 를 만드는 구역 내 index 집합,
이 구역 내에서 x를 최대로 만드는 index i*(r,j)를 구하고, 이 x 값을 로 함
이제, back propagation 식을 보자.
앞서 본 아이버슨 괄호가 또 있다.
이 괄호는 이 index가 x를 최대로 만드는 index일 때 1을 반환한다.
즉 r, j의 구역을 움직인다.
이 와중에 만일 를 최대로 만드는 index가 있다면, 의 기울기에 계속 누적시키는 것이다.
SGD hyper-parameters
Softmax 분류기, BB regression 학습에 사용한 초깃값은 다음과 같다.
- Zero-mean 가우시안 분포(표준 편차 0.01 / 0.001), Bias = 0
- Learning rate : 0.001
- Per-layer learning rate = 가중치에는 1, biases에는 2
- 모멘텀 = 0.9 / Parameter decay = 0.0005
2.4 Scale invariance
1) Brute force 학습
미리 지정된 pixel 크기로 변환 후 학습한다.
2) 이미지 피라미드 학습(multi-scale)
이미지 피라미드로 scale invariance 만든다(고정된 이미지 크기가 아니라 다양하게).
Multi-scale 학습에서, 랜덤하게 피라미드 scale을 샘플링한다(데이터 증강).
단 GPU 메모리 한계로 작은 네트워크에서만 학습했다.
테스트에는 각 이미지의 scale-normalize를 위해 사용한다.
3. Fast R-CNN detection
네트워크의 input = 이미지나 이미지 피라미드 + R개의 객체 제안
테스트에서 R은 대략적으로 2000개 정도이며 이후 45000개까지 확장해서 논의할 것이다.
이미지 피라미드에서, 각 RoI의 scale은 scale된 후 크기가 pixel에 가깝게 되도록 설정된다.
테스트 RoI r에서 forward pass는 클래스 사후 확률 p와 bb offset r을 출력한다.
이에 대해 detection confidence를 클래스 k에 대해 계산한다.
수식은 이다.
(수식 살펴보기, 삼각형 등호는 정의한다라는 의미이다,
즉 bb regression r이 주어졌을 때 클래스가 k일 확률을 로 정의하자 이다)
그리고 non-maximum suppression(NMS)을 각 클래스에 독립적으로 시행한다.
(NMS는 이전 R-CNN에서도 나왔다, 이는 불필요한 bounding box를 IoU 기반으로 합치는 것이다)
3.1 Truncated SVD for faster detection
이미지 분류에서는 FC보다 conv에서 더 많은 시간을 소비한다.
반면 객체 감지에서는 RoI 계산이 많아서 FC에서 거의 절반 이상의 forward pass 시간을 쓴다.
이러한 시간을 줄이는 방법 = FC layer 계산은 truncated SVD를 통해 압축하면 된다!
선형대수 등장..! truncated SVD란?
SVD(Singular Value Decomposition), 특잇값 분해
임의의 직사각 행렬 W에 대해
직교행렬 U, V / 직사각 대각행렬 로 분해할 수 있다.
대각행렬에서 0이 아닌 요소를 모두 사용하는 경우는 Full SVD,
0이 아닌 부분을 잘라내어 사용하는 경우(대응되는 U, V도 자른다) Truncated SVD라 부른다.
이미지 및 내용 출처
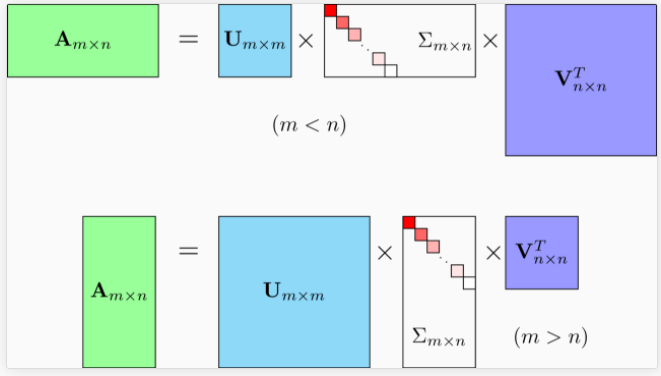
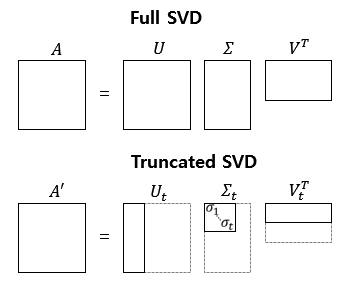
따라서 layer weight W(uxv)는 다음과 같이 분해된다.
U : u x t
: t x t
V : v x t
이 과정을 거치면 parameter는 uv -> t(u+v)로 줄어든다.
만일 t가 min(u, v)보다 확연히 작다면 효과가 뛰어날 것이다.
(풀이 및 의문 : uxt + vxt + txt 에서 대각행렬은 txt개가 아니라 t개, 따라서 t(u+v)라는데..
t(u+v+1)이 아닌지? 이정도는 무시하는건가)
따라서 가중치가 W인 기존의 FC layer를
가중치가 (bias=0)인 FC layer 하나 + 가중치가 U(bias = W bias)인 FC layer 하나
로 결합해서 대체했다(non linearity 없이!).
4. Main results
사실상 이번 섹션의 요약이다. 세 가지 발전이 있다.
1) VOC07, 2010, 2012에 대해 SOTA mAP
2) R-CNN, SPPnet보다 빠른 학습과 테스트
3) VGG16에서 fine-tuning해서 더 나은 mAP 얻음
4.1 Experimental setup
[용어 설명]
S : AlexNet(R-CNN에 쓴 것) 기반
M : VGG_CNN_M_1024 기반(S와 깊이는 같지만 더 넓음)
L : VGG16 기반
모든 실험은 single-scale 학습 및 테스트이다(s=600).
4.2 VOC 2010 and 2012 results
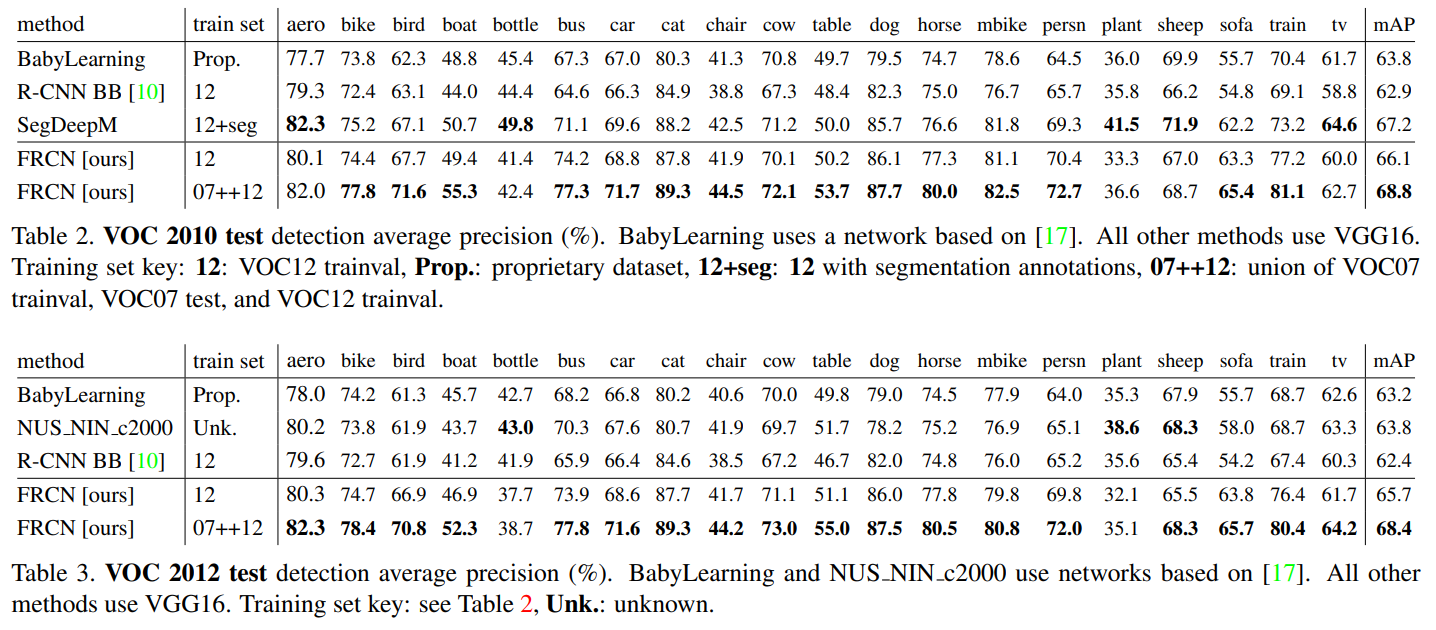
VOC12에서 Fast R-CNN은 최고의 결과를 냈다.
65.7%의 mAP를 달성했다(추가 데이터와 함께할 땐 68.4%).
또 R-CNN 기반인 다른 방법들보다 속도도 빨랐다.
VOC10에서는 SegDeepM에 밀렸다(67.2% vs 66.1%).
SegDeepM은 Markov 랜덤 필드 + R-CNN 기반 모델이며 VOC12에 segmentation 주석까지 추가해 학습했기 때문이다.
만일 SegDeepM에 R-CNN 대신 Fast R-CNN이 있었다면 더 좋은 성적을 냈을 것이다.
07++12 학습 세트를 쓴 경우 Fast R-CNN은 68.8%의 mAP로 SegDeepM보다 더 낫다.
(근데 SegDeepM도 똑같이 학습해보면... 음...)
4.3 VOC 2007 results
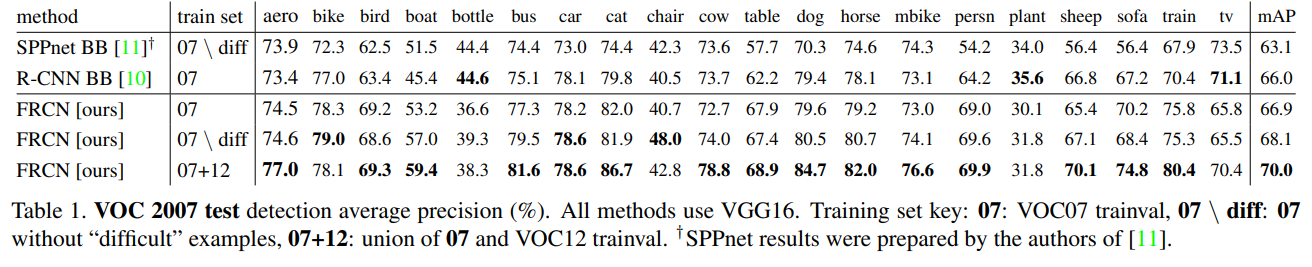
VGG16 기반으로 Fast R-CNN과 R-CNN/SPPnet을 비교해보자.
각 방법들은 bb regression도 사용했다.
VGG16 SPPnet은 5 scale을 사용했음에도 Fast R-CNN(single scale)보다 좋지 않았다.
mAP 차이는 두드러진다(63.1% vs 66.9%).
R-CNN은 mAP 66.0%를 도달했다.
여담으로, SPPnet은 PASCAL에서 'difficult'로 마킹된 예제를 제외하고 학습했다.
만일 Fast R-CNN도 그렇게 한다면 mAP는 68.1%까지 상승한다.
다른 실험들은 모두 'difficult' 예제를 사용했다.
4.4 Training and testing time
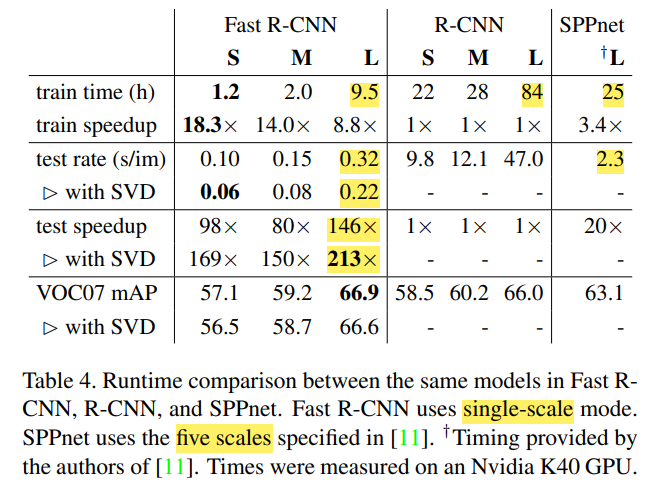
학습/테스팅 속도가 비약적으로 상승했다.
특히 truncated SVD 사용시 더 압도적이다.
그럼에도 mAP는 훨씬 좋다(truncated SVD 사용시 mAP 약간 감소).
Fast R-CNN은 또한 수백 기가의 저장 공간을 절약했다(feature 임시 저장 안함).
Truncated SVD
Truncated SVD를 사용하면 mAP의 약간의 감소(0.3정도)로 비약적 속도 상승을 이뤄낼 수 있다.
또 추가적인 fine-tuning도 필요없다.
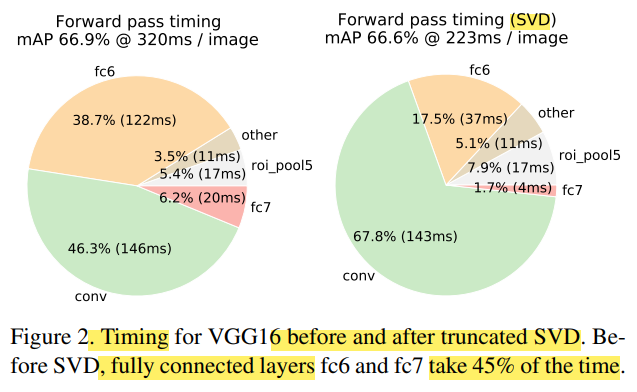
Fig. 2를 보면 알 수 있듯이, FC layer가 기존에는 총 시간의 약 45%나 차지했다.
그러나 truncated SVD를 사용해 약간의 mAP 손실은 있지만 속도가 엄청나게 향상되었다.
(총 시간 320ms -> 223ms, 약 30% 감소/mAP 0.3 감소)
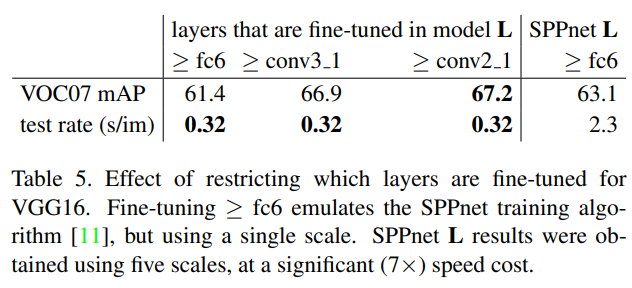
4.5 Which layers to fine-tune?
SPPnet은 FC layer들만 fine-tuning했다.
그렇지만 저자들은 깊은 네트워크는 conv layer도 fine-tuning해야 한다고 가설을 세웠다.
따라서 이를 위해 일부 layer를 freeze하고 실험했다.
비교 대상은 SPPnet L(VGG16 기반)으로, FC layer만 fine-tuning된 모델이다.
과연 정말 모든 conv layer가 fine-tune되어야할까?
아니다!
Conv1(가장 먼저 나오는 conv layer)는 일반적인 특성을 수집하기에 굳이 fine-tuning할 필요가 없다(mAP 상승에 큰 영향 x).
VGG16에서, conv3_1부터 위 / conv2_1부터 위 / FC부터 위 세 가지로 나누어서 실험했다.
(conv1_1은 GPU 부족)
Conv2_1부터 위로 학습은 conv3_1부터와 비교해서 학습 속도가 1.3배나 느려지지만(9.5시간->12.5시간), mAP는 0.3만 좋아졌다.
반면 conv3_1부터 위로 학습은 FC만 fine-tuning할때보다 mAP가 5.5 높다.
(성능 conv2_1부터 > conv3_1부터 >> FC만)
따라서 이 논문에서 나오는 모든 Fast R-CNN(VGG16 기반)은 conv3_1부터 fine-tuning했다.
(굳이 0.3 더 높이자고 학습 속도 손해 x)
S, M(VGG16말고 다른 것 기반) 모델은 conv2부터 fine-tune했다.
5. Design evaluation
PASCAL VOC07 데이터셋으로 세 가지 실험을 해보자.
이를 통해 디자인을 평가할 것이다.
5.1 Does multi-task trianing help?
Multi-task 학습은 간편하지만, 객체 탐지 성능 향상에도 도움을 줄까?
(Multi task : BB regression + 클래스 분류 동시에)
이를 위해 여러개로 나누어서 테스트했다.
1) Baseline, , BB regressor 없음
2) Multi-task 학습(, 학습에는 BB 있음), 그러나 테스트에는 BB regressor 없음
3) Stage-wise 학습(클래스 먼저 학습하고 BB 학습), 테스트에도 BB regressor 있음
4) Multi-task 학습 + 테스트 BB regressor
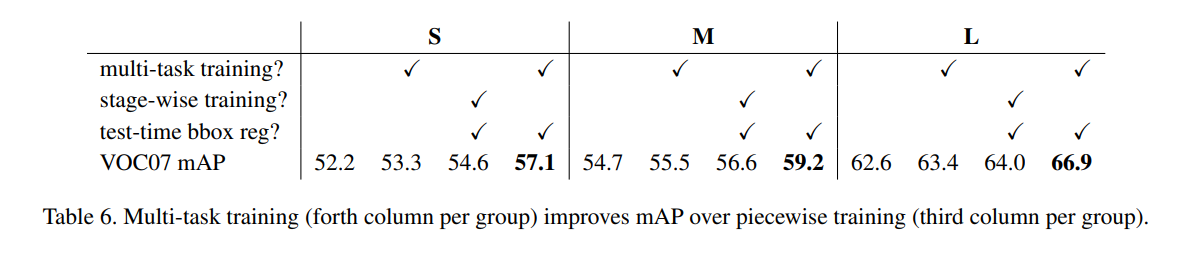
1) -> 2)로 갈 때 약 0.8~1.1의 mAP 상승이 있었다(Multi-task의 이점).
또 stage-wise가 multi-task보다 낮은 성능임을 알 수 있었다(역시 Multi-task의 이점).
즉, multi-task 학습은 stage-wise/아예 BB 안쓰고 학습 보다 더 좋은 성능을 낸다.
5.2 Scale invariance: to brute force or finesse?
Brute force 방식(single scale) / 이미지 피라미드 방식(multi-scale) 비교한다.
s : 이미지의 가장 짧은 부분의 길이
먼저 모든 single-scale 실험은 s=600 고정한다.
단 가장 긴 쪽이 1000을 넘지 않게 하며 이미지 비율을 고정했기에, s가 600보다 작을 수 있다.
PASCAL 이미지가 384x473 크기여서 여기서는 1.6배 커진다.
Multi-scale에서는 s를 {480, 576, 688, 864, 1200}으로 지정했다.
그러나 가장 긴 쪽의 길이가 2000을 넘지 않도록 했다.
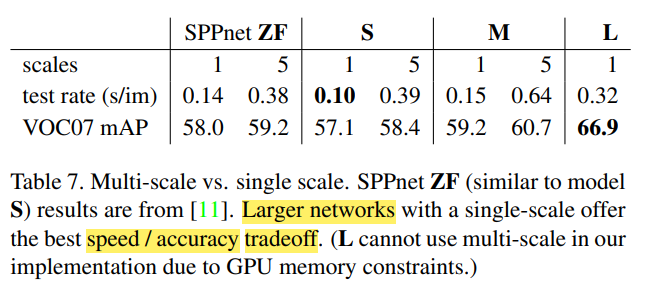
Table 7은 그 결과를 보여준다.
놀라운 점은 single scale과 multi scale이 그리 큰 차이가 나지 않는다는 것이다.
또 속도/정확도의 tradeoff가 생기는데, multi-scale은 속도는 무척 느려지는 반면 mAP 약간 증가한다.
Single-scale이 속도와 정확도의 tradeoff를 잘 보여주는 관계로(확확 늘어남),
이 장의 남은 실험은 single-scale(s=600)으로 할 예정이다.
5.3 Do we need more training data?
학습 데이터가 많다면 성능이 좋아질까?
타 논문에 따르면 mAP는 수백~수천 학습 예제에서 포화되었다(성능 발전이 없다)고 했다.
그러나 데이터셋을 늘리니(VOC07+VOC12) mAP가 66.9%에서 70.0%까지 상승했다.
즉 학습 데이터의 증가로 성능 발전을 이뤄냈다.
(다만 포화되는지는 모름)
5.4 Do SVMs outperform softmax?
과연 softmax(Fast R-CNN)가 SVM(R-CNN/SPPnet)보다 성능이 좋을까?
이를 위해 Fast R-CNN에서 SVM을 사용해 실험했다.
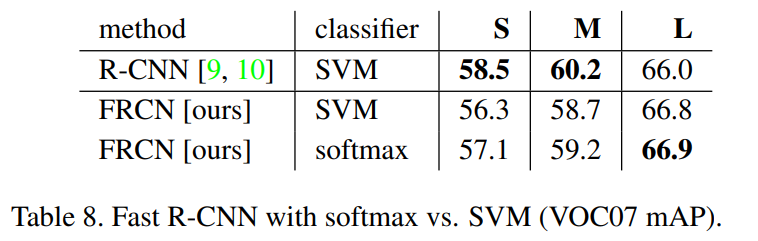
결과는 softmax가 SVM보다 약간 낫다(0.1, 0.8 mAP).
따라서 softmax만으로도 충분하다.
(one-vs-rest인 SVM과 달리 sofmtax는 클래스 간 경쟁을 시킨다)
5.5 Are more proposals always better?
영역 제안 수가 증가하면 성능이 더 좋아질까?
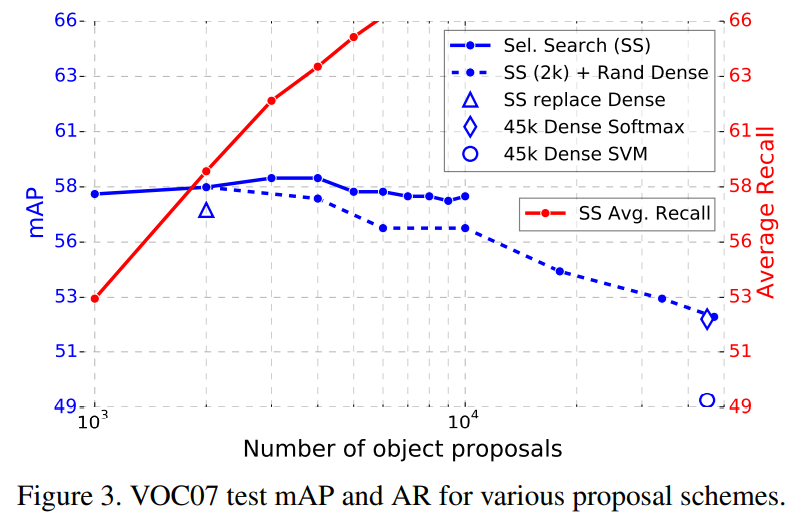
꼭 그런건 아니다.
처음에 약간 증가하지만 오히려 너무 많아지면 감소한다.
따라서 영역 제안이 늘어난다고 성능이 좋아지지는 않는다.
(오히려 sparse한 영역 제안이 dense한 영역 제안보다 성능이 좋다)
6. Conclusion
이 논문에서는 더 빠르고 성능도 좋은 Fast R-CNN을 제안했다.
SOTA 결과를 내면서, 동시에 다양한 실험도 할 수 있엇다.
그 중 하나로 sparse한 영역 제안이 성능 향상을 준다는 것이다.
(이는 과거에는 비용 문제로 실험하지 못했다)
이 외에도 발견되지 못한 다양한 테크닉이 있을 것이고, 이는 아마 객체 탐지 발전에 큰 도움을 줄 것이다.
Reference
Paper
[1] https://bkshin.tistory.com/entry/논문-리뷰-Fast-R-CNN-톺아보기
RoI
[2] https://inhovation97.tistory.com/69
[3] https://velog.io/@iissaacc/RoI-Pooling
[4] https://velog.io/@imfromk/CV-Understanding-RoIsRegion-of-Interest
[5] https://talktato.tistory.com/9
[6] https://yeomko.tistory.com/15

유익한 글이었습니다.