크기 불변 특징(Scale invariant feature)
- 코너의 특징
- 평탄한 영역, 에지 영역에 비해 변별력이 높음
- 이동, 회전 변환에 강인
- 크기 변환에 취약
- 크기 불변 특징점
- 스케일 스페이스(scale-space) 또는 이미지 피라미드(image pyramid)를 구성하여 영상의 크기가 바뀌더라도 반복적으로 검출될 수 있는 특징점을 찾으면 매칭 등의 응용에서 사용할 수 있음
- 스케일 스페이스: 블러와 이미지 크기를 줄여 만들어진 이미지 set들을 사용하는 방식
- 이미지 피라미드: 이미지를 1, 1/2, 1/4, ... 크기로 줄인 후 이 이미지 set들을 사용하는 방식
- 주요 크기 불변 특징점 알고리즘:
- SIFT, SURF, KAZE, AKAZE, ORB 등
- 특징점(feature point) 키포인트(keypoint) 관심점(interest point)
- 기술자(descriptor) 특징 벡터(feature vector): 특징점을 벡터로 표현
- 스케일 스페이스(scale-space) 또는 이미지 피라미드(image pyramid)를 구성하여 영상의 크기가 바뀌더라도 반복적으로 검출될 수 있는 특징점을 찾으면 매칭 등의 응용에서 사용할 수 있음
SIFT
- Scale Invariant Feature Transform
- Scale & rotation invariant, local feature detector & descriptor
- 2020년 3월 알고리즘 특허 만료
- OpenCV 4.4 버전부터 메인 모듈로 통합됨
SIFT 계산 단계
Detector: key point를 이미지에서 검출
1. Scale-space extrema detection
2. Keypoint localizationDescriptor: key point 근방의 부분영상에서 특징 벡터를 추출
3. Orientation assignment
4. Keypoint description
Scale-space Extrema Detection
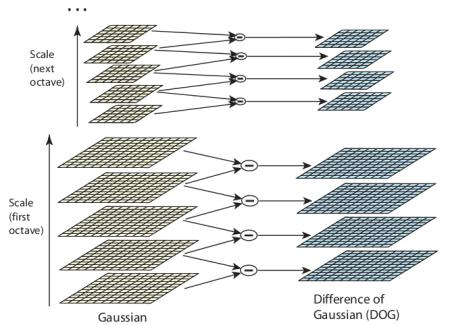
- 각 옥타브 별로 이미지를 Gaussian blur 처리 후(왼쪽), 연속된 gaussian blurring된 이미지들끼리 차 영상을 구함(오른쪽)
- DoG 영상에서 특징점의 위치를 찾게 됨
Keypoint Localization
- "The maxiam and minima of (=가우시안 함수를 두번 미분) produce the most stable image features..." (Scale-space theory)
- LOG(Laplacian Of Gaussian) 대신 DOG 영상의 모든 점에서 local maxima 또는 local minima를 선택
- DOG는 LOG의 근사화 함수 ()
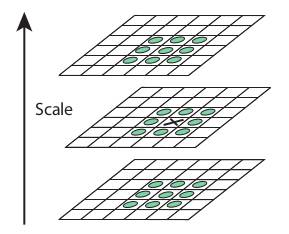
- 한 이미지 옥타브 기준, DOG로 만든 이미지가 준비되어 있을 때 현재 이미지 한 픽셀을 둘러싼 8픽셀, 전후 같은 위치의 9픽셀 각각을 모두 비교했을 때, 현재 픽셀이 다른 26개 픽셀보다 큰 지/작은 지 여부를 모두 만족할 경우 이 픽셀을
local Maxima/local Minima로 채택함 - 코너 위주의 특징점을 찾기 위해, 다음과 같은 필터링을 진행함
- 서브 픽셀 정확도 높임
- 낮은 대비(contrast) 극점 제거
- 에지 성분 제거
==> 스케일, 회전 변화에도 다시 검출될 가능성이 높은 특징점만을 남김
Orientation Assignment
- 키포인트 근방의 부분 영상을 추출
- 부분 영상의 모든 픽셀에서 그래디언트 성분(크기&방향(을 계산
- 방향 성분에 대한 히스토그램 생성 (360도에 대해 36개 빈)
- 히스토그램 최댓값 방향과 최댓값의 80% 이상 크기를 갖는 빈 방향을 키포인트 방향으로 설정
- 하나의 좌표에서 여러 개의 키포인트 표현 가능
- 방향성분 최빈 히스토그램을 그림에 표현하면 화살표로 나타나는데, 긴 화살표는 이미지를 많이 축소시켰을 때 추출된 방향성분, 짧은 화살표는 원본 이미지에서 추출된 방향성분이라고 생각할 수 있음
- 각 키포인트에 대해 기준 방향 성분을 설정
- 각 키포인트는 위치, 스케일, 기준 방향 정보를 가짐
- 이를 이용하여 크기, 방향에 불변한 특징 벡터를 추출
Keypoint Description
- 각 키포인트 위치에서 스케일과 기준 방향을 고려하여 사각형 영역을 선택
- 사각형 영역을 4x4 구역으로 분할하고, 각 구역에서 8방향의 방향 성분 히스토그램을 구함
--> 4 x 4 x 8 = 128 차원의 벡터(float 자료형)
--> 128 x 4byte = 512byte
--> keypoint 1000개면, 512KB
기타 특징점 알고리즘
SURF (Speed-Up Robust Features)
- SIFT를 기반으로 속도를 향상시킨 크기 불변 특징점 검출 방법
- DOG(Derivative of Gaussian) 함수를 단순한 이진 패턴으로 근사화
- 적분 영상(integral image)을 이용하여 속도 향상
- http://www.vision.ee.ethz.ch/~surf/
KAZE
- KAZE(바람): 비선형 스케일 스페이스에서 공기의 흐름
- 가우시안 함수 대신 비선형 확산 필터(nonlinear diffusion filter)를 이용하여 특징점을 추출
- SURF 보다는 느리지만 SIFT 보다 빠르고 동등한 성능
- http://www.robesafe.com/personal/pablo.alcantarilla/kaze.html
BRIEF (Binary Robust Independent Elementary Features)
-
이진 기술자를 이용한 빠른 키포인트 기술 방법(Not detector!)
-
키포인트 주변 픽셀 쌍을 미리 정하고, 픽셀 값의 크기를 비교하여 0 또는 1로 특징을 기술
-
weak한 판별 기준을 많이 모아서 사용 (boosting)
- 유사한 계산 방식으로, 매칭을 할 때 해밍 거리(Hamming distance)를 사용하기도 함.
ex) 1011101 vs 1001001 의 경우, 서로 다른 비트 개수를 찾는 해밍거리는 2
- 유사한 계산 방식으로, 매칭을 할 때 해밍 거리(Hamming distance)를 사용하기도 함.
-
특정 패치(p)에서 point pair (x,y)의 픽셀 값 크기 테스트:
-
차원 특징 벡터(기술자):
ORB(Oriented FAST and Rotated BRIEF)
- FAST 방법으로 키포인트를 찾고 Harris 코너 방식으로 순위를 매김
- 피라미드 영상에 적용하여 크기 불변성 확보
- 키포인트의 방향 성분을 이용하여 BRIEF 방법에서 픽셀 쌍의 좌표를 회전하여 특징 벡터를 추출 (이진 기술자)
- SIFT, SURF 보다 훨씬 빠르고 SURF보다 성능이 좋음
AKAZE(Accelerated KAZE)
- KAZE 알고리즘의 속도 향상 버전
- 비선형 공간에서 피라미드를 구축
- 이진 기술자를 사용
- https://www.youtube.com/watch?v=lI50PGr2TEU
References
- 자율주행 데브코스 황선규 강사님
- OpenCV documentation
First Attempt In Learning