공간적 필터링
2D 필터링 함수
void filter2D(InputArray src, OutputArray dst,
int ddepth, InputArray kernel,
Point anchor=Point(-1,-1), double delta=0,
int borderType=BORDER_DEFAULT);
src: 입력 영상dst: 출력 영상ddepth: 원하는 결과 영상의 깊이를 지정. -1이면 src와 같은 깊이를 사용- 필터링 1번이 아니라, 여러번의 연산을 순차적으로 수행하고 싶을 경우 실수 값을 저장해서 가공할 수 있음
| Input depth (src.depth()) | Output depth (ddepth) |
|---|---|
| CV_8U | -1 / CV_16S / CV_32F / CV_64F |
| CV_16U / CV_16S | -1 / CV_32F / CV_64F |
| CV_32F | -1 / CV_32F / CV_64F |
| CV_64F | -1 / CV_64F |
kernel: 필터 마스크 행렬. 1채널 실수형.anchor: 고정점 위치. (-1,-1)이면 필터 중앙을 고정점으로 사용.delta: (optional) 추가적으로 더할 값borderType: 가장자리 픽셀 처리 방법
블러링
평균 값 필터를 이용한 블러링 함수
- 평균 값 필터(mean filter)
- 영상에 평균 값 필터를 적용하면 인접한 픽셀 간의 급격한 그레이스케일 값 변화가 줄어들어, 날카로운 에지가 무뎌지고 영상에 있는 잡음이 감소하는 효과
- 마스크의 크기(3x3 -> 5x5)가 커질수록 평균 값 필터 결과가 더욱 부드러워짐 -> 더 많은 연산량 필요
- 단점: 같은 가중치를 사용하기 때문에 현재 위치의 픽셀값의 비중은 줄어들고, 상대적으로 멀리 떨어져 있는 픽셀들의 영향이 커짐
void blur(InputArray src, OutputArray dst, Size ksize,
Point anchor=Point(-1,-1), int borderType=BORDER_DEFAULT);src: 입력 영상dst: 출력 영상ksize: 평균값 필터 크기anchor: 고정점borderType: 가장자리 픽셀 확장 방식
가우시안 필터를 통한 블러링
void GaussianBlur(InputArray src, OutputArray dst, Size ksize,
double sigmaX, double sigmaY=0,
int borderType=BORDER_DEFAULT);src: 입력 영상. 각 채널 별로 처리됨. (CV_8U, CV_16U, CV_16S, CV_32F, CV_64F)dst: 출력 영상. src와 같은 크기, 같은 타입ksize: 가우시안 필터 크기. Size()를 지정하면 sigma 값에 의해 자동 결정됨.sigmaX: x 방향으로의 표준편차 sigma, 값이 크면 많이 blurring, 값이 작으면 적게 blurring 됨sigmaY: y 방향으로의 표준편차 sigma. 0이면 sigmaX와 같게 설정.borderType: 가장자리 픽셀 확장 방식
샤프닝
언샤프 마스크(unsharp mask) 필터링
- 날카롭지 않은(unsharp) 영상, 즉, 블러링된 영상을 이용하여 날카로운 영상을 생성
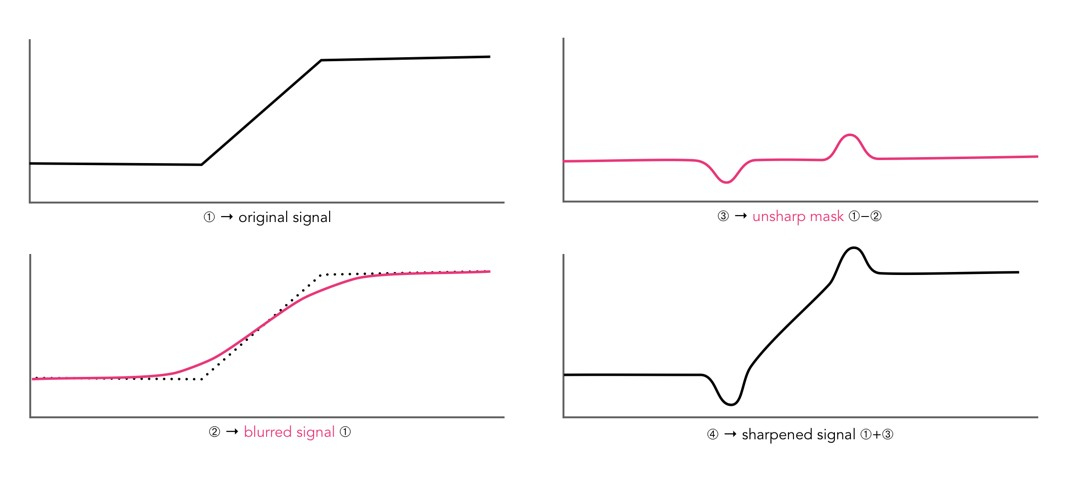
1) : original signal
2) : blurred signal
3)
4)
blur 함수를 활용한 코드 구현
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
// src = {0,0,0,0,1,0,0,0,0};
Mat blr;
blur(src, blr, Size(3,3));
// src = {1/9,1/9,1/9,1/9,1/9,1/9,1/9,1/9,1/9};
Mat dst = 2 * src - blr;
// {0,0,0,0,2,0,0,0,0} - {1/9,1/9,1/9,1/9,1/9,1/9,1/9,1/9,1/9};GaussianBlur 함수를 사용
int main(void)
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
Mat blr;
GaussianBlur(src, blr, Size(3,3));
Mat dst = 2 * src - blr;
}- Sharpness 조절을 위한 가중치 :
- 를 크게 하면 날카로운 성분을 강조하고, 작게 하면 날카로운 성분을 약하게 만드는 가중치를 줌 (1을 기준으로 작고 커짐)
따라서,
잡음 제거 필터
- 잡음의 종류:
- Salt & peper 노이즈
- Gaussian 노이즈
잡음 추가할 때 사용되는 randn 함수
void randn(InputOutputArray dst, InputArray mean, InputArray stddev);dst: 정상 분포 난수 행렬,dst는 미리 생성되어 있어야 하며, 1~4 채널을 가질 수 있음mean: 평균stddev: 표준편차
- 참고사항:
- 생성된 난수는
dst타입에 맞게 자동 변환됨 - 만약
dst가uchar자료형을 사용하면 0보다 작은 난수는 모두 0으로 설정됨 - 균일분포 난수를 발생하려면
randu()함수를 사용
- 생성된 난수는
잡음 추가 함수 사용 예
int main(void)
{
Mat src = imread("rose.bmp", IMREAD_GRAYSCALE);
// src type = CV_32S == signed int
Mat noise(src.size(), CV_32S);
randn(noise, 0, 10);
Mat dst;
// dst type = CV_8U 로 변환
add(src, noise, dst, noArray(), CV_8U);
...
}프로파일을 이용한 잡음 분석
- 프로파일(profile):
- 영상에서 특정 경로(라인 또는 곡선) 상에 있는 픽셀의 밝기 값을 그래프 형태로 나타낸 것
- Line profile, intensity profile
양방향 필터(bilateral filter)
- 에지 보전 잡음 제거 필터(edge-preserving noise removal filter)의 하나
- 평균 값 필터 또는 가우시안 필터는 에지 부근에서도 픽셀 값을 평탄하게 만드는 단점이 있음
- 기준 픽셀과 이웃 픽셀과의 거리, 그리고 픽셀 값의 차이를 함께 고려하여 블러링 정도를 조절
- 기본 가우시안 필터에 비해 연산 속도가 느려질 수 있음
- : p 점과 q 점의 픽셀 좌표(벡터)
- : p 점과 q 점에서 픽셀값
- : 필터 커널 합이 1이 되도록 만드는 정규화 상수
양방향 필터 함수 bilateralFilter
void bilateralFilter(InputOutputArray src, OutputArray dst,
int d, double sigmaColor, double sigmaSpace,
int borderType=BORDER_DEFAULT);src: 입력 영상. 8비트 또는 실수형, 1채널 또는 3채널dst: 출력 영상. src와 같은 크기, 같은 타입d: 필터링에 사용될 이웃 픽셀의 거리(지름). 음수(-1)를 입력할 경우 sigmaSpace 값에 의해 자동 결정됨sigmaColor: 색 공간에서 필터의 표준 편차, 픽셀 값 차이가 얼마 이하일 때만 블러링을 하고 픽셀 값 차이가 얼마 이상일 때는 블러링을 수행하지 않음sigmaSpace: 좌표 공간에서 필터의 표준 편차, 가우시안 블러에서의 시그마 값과 비슷한 개념borderType: 가장자리 픽셀 확장 방식
References
- What is unsharp masking?
- 자율주행 데브코스 황선규 강사님
First Attempt In Learning