환경: ubuntu 22.04, ros2 humble, cyclonedds
가제보 오류 시
. /usr/share/gazebo/setup.sh
ros2 nav2 navigation 프로젝트
최종 버전 배포 전 ros2 bag 패키지도 추가하려고 했으나
실행하자 다음과 같은 오류가 발생했다.
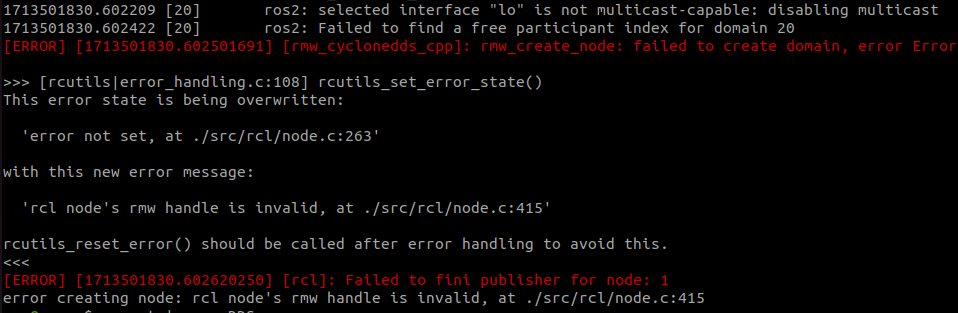
ros2 bag을 마지막에 추가했기 때문에
운좋게도 원인이 bag 때문임을 바로 알 수 있었다.
원인은 cyclondedds와 rosbag 간의 충돌이었다.
해결방법은 다음과 같다.
home 디렉토리에 <폴더>/<xml파일> 을 만들어 준다.
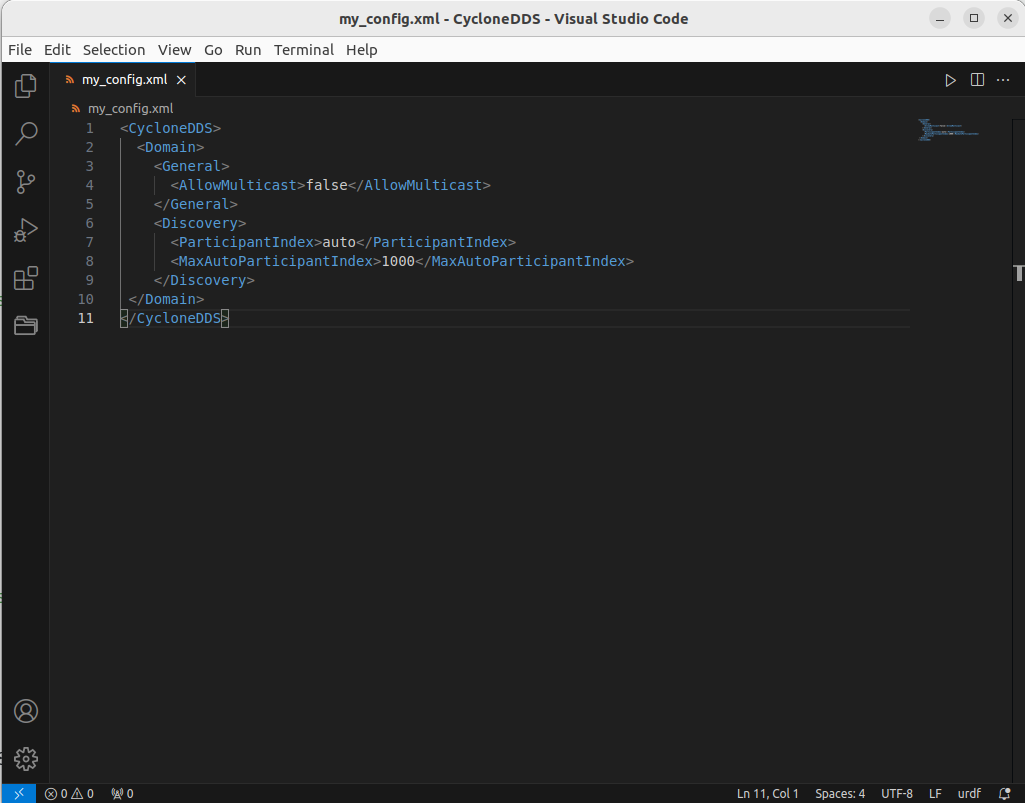
<CycloneDDS>
<Domain>
<General>
<AllowMulticast>false</AllowMulticast>
</General>
<Discovery>
<ParticipantIndex>auto</ParticipantIndex>
<MaxAutoParticipantIndex>1000</MaxAutoParticipantIndex>
</Discovery>
</Domain>
</CycloneDDS>위 코드를 넣어준다.
export CYCLONEDDS_URI="file://$HOME/CycloneDDS/my_config.xml".bashrc에 위 코드를 추가한다.

오류가 발생한 이유는 제작한 navigation 패키지 내부에서 몇몇 토픽이 다중으로 pub / sub 되는 구조이다.
multicast : 1 vs n 통신
broadcast : n vs n 통신
multicast 에서 broadcast 로 바꿔준다.
dds 버전 확인
dpkg -l | grep dds
참고 :
https://cyclonedds.io/docs/cyclonedds/latest/config/index.html
