
rclpy(ROS Client Library for Python)
rclpy는 Python을 위한 ROS 클라이언트 라이브러리로, Python을 사용하여 ROS2 노드를 개발하고 상호작용할 수 있도록 지원하는 라이브러리이다.
ROS2의 구조는 다음과 같다.
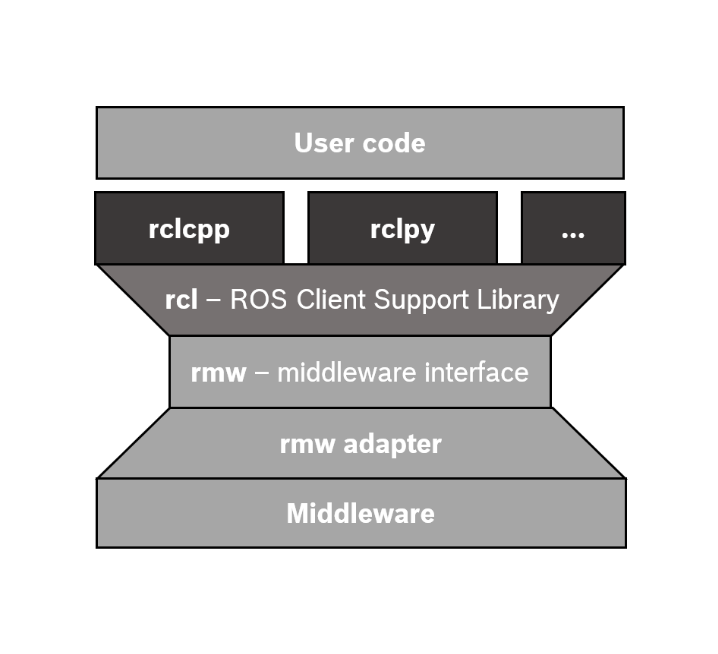
✔ User code
- ROS2를 사용하는 로봇의 실제 구현 부분
- 토픽,서비스,액션 등을 포함한 로직
✔ rclcpp / rclpy
- C++ / Python으로 구현된 ROS2 클라이언트 라이브러리
- 사용자 코드와 ROS2 하위 계층 연결하는 인터페이스 역할
✔ rcl (ROS Client Support Library)
- C++로 작성된 ROS2 클라이언트 라이브러리
- rclpy가 rcl이 제공하는 기능을 사용할 수 있도록 래핑(wrapping)하고 있다
✔ rmw (ROS Middleware Interface)
- ROS2와 미들웨어 간의 인터페이스 정의
- 퍼블리셔/서브스크라이버, 서비스, 액션 등의 통신 개념 추상화
✔ rmw adapter
- rmw 인터페이스를 실제로 구현한 것
- DDS와 호환되는 형태로 데이터 변환
✔ Middleware
- 실제 데이터를 전달하고 통신을 수행하는 계층
- rmw, rmw adapter, Middleware 모두 DDS를 위해 사용
rclpy 실행 흐름
우리는 rlcpy를 통해 퍼블리셔/서브스크라이버, 서비스, 액션, 파라미터 등 통신에 필요한 로직을 구현할 수 있다. 노드에서 어떻게 실행이 되고 있는지 살펴보자.
import rclpy
from rclpy.node import Node
from std_msgs.msg import String # 추가: 메시지 타입을 임포트
class MyNode(Node):
def __init__(self):
super().__init__('my_node_name')
self.publisher = self.create_publisher(String, 'topic_name', 10)
self.timer = self.create_timer(1.0, self.timer_callback)
def timer_callback(self):
msg = String()
msg.data = 'Hello, ROS2!'
self.publisher.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
node = MyNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
1. rclpy.init(args=args) : 초기화
- ROS2의 네트워크와 통신할 수 있도록 필요한 리소스 초기화
2. node = MyNode(): 노드 생성 및 설정
MyNode클래스의 인스턴스 생성create_publisher()를 통해topic_name이라는 토픽에String타입의 메시지를 발행할 퍼블리셔 생성create_timer()를 사용해 1초마다timer_callback함수를 호출하여 메시지를 주기적으로 발행
3. rclpy.spin(node) : 이벤트 루프 실행
- 노드가 종료될때까지 이벤트 루프 실행
4. node.destroy_node() : 노드 종료
- 노드를 종료하고 관련 리소스 해제
5. rclpy.shutdown() : 클라이언트 라이브러리 종료
rclpy를 종료하고 노드와 관련된 모든 리소스를 해체하여 메모리 누수 방지
Executor
Executor는 rclpy에서 콜백함수를 관리하고 실행하는 역할을 한다. ROS2는 노드의 다양한 콜백 함수가 특정 이벤트를 발생할 때 실행한다. Executor는 이러한 이벤트를 감지하고, 적절한 콜백을 호출하여 실행하는 역할을 담당한다. 이를 통해 ROS2는 노드 시스템에서 비동기적으로 이벤트를 처리할 수 있다.
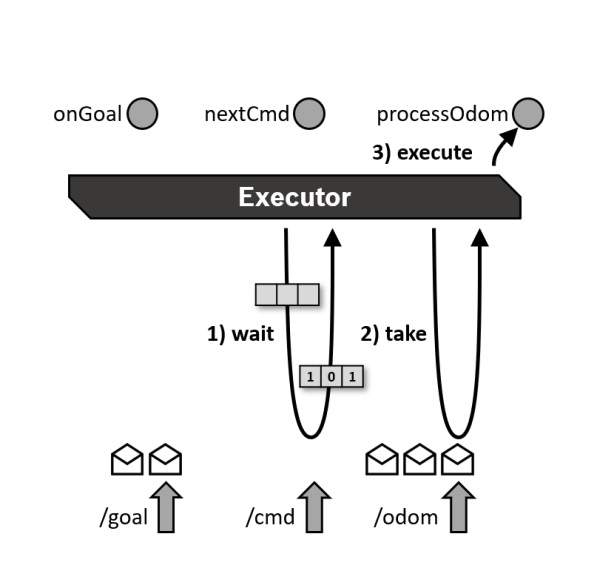
이벤트 감지 - 콜백을 큐에 수집 - 콜백 실행 순으로 동작
Executor 종류
✔ SingleThreadedExecutor
from rclpy.executors import SingleThreadedExecutor
executor = SingleThreadedExecutor()
executor.add_node(my_node)
executor.spin()
- 단일 스레드에서 콜백 실행
- 하나의 스레드만 사용하므로, 콜백이 완료될 때까지 다른 작업 처리 불가
- 단순 노드, 처리 속도가 중요하지 않은 환경에서 사용
✔ MultiThreadedExecutor
from rclpy.executors import MultiThreadedExecutor
executors = MultiThreadedExecutor(num_threads=4)
executor.add_node(my_node)
executor.spin()
- 여러 스레드에서 병렬로 콜백 실행
- 다수의 콜백, 실시간 처리가 요구되는 환경에서 사용
- 리소스 부족시 중요도가 높은 패키지부터 실행
Exectutor와 spin
Exectutor는 콜백을 처리하는 관리자로, 콜백을 실행하는 규칙과 방식 정의spin은 해당 콜백을 계속 처리하도록 하는 루프 역할로, 규칙에 따라Executor가 동작해주도록 해주는 역할
def main(args=None):
rclpy.init(args=args)
node = MyNode()
executor = rclpy.executors.SingleThreadedExecutor()
executor.add_node(node)
try:
executor.spin()
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name == "__main__":
main()
SingleThreadedExecutor를 생성하여 콜백을 순차적으로 실행하여 executor.spin()으로 노드가 종료될때까지 콜백을 처리되도록 하였다.
| 구분 | Executor | spin |
|---|---|---|
| 역할 | 콜백 함수 관리 및 실행을 담당 | 이벤트 루프를 시작하여 노드가 종료될 때까지 콜백을 처리 |
| 설명 | 콜백을 스케줄링하고 처리할 스레드 방식을 결정 (SingleThreaded 또는 MultiThreaded) | Executor를 사용하여 이벤트 처리를 수행하고 노드를 활성화 상태로 유지 |
| 종류 | SingleThreadedExecutor, MultiThreadedExecutor | spin(), spin_once() |
