📕 참고: ROS2로 시작하는 로봇 프로그래밍, topic_service_action_rclpy_example
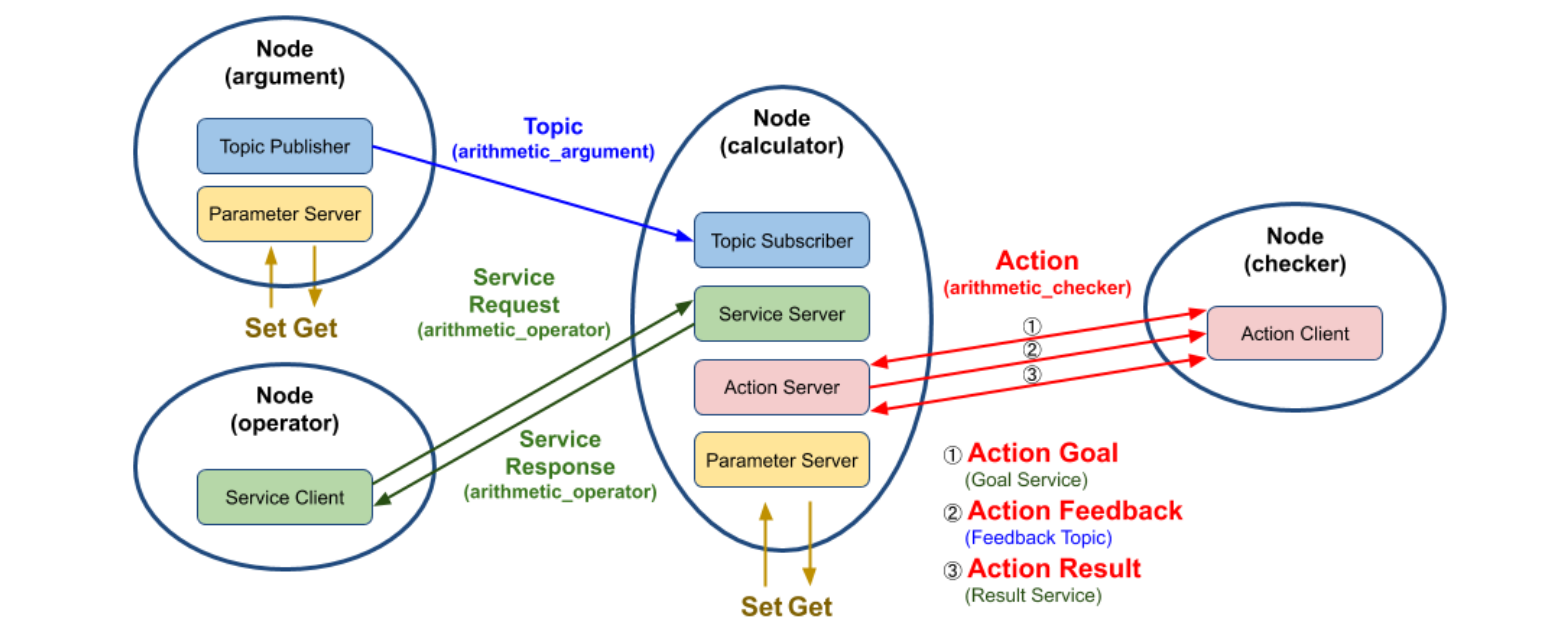
목적별로 작성된 노드들을 서로 연동하여 하나의 계산기로 작동하는 패키지를 만들어보려고 한다.
arument
- arithmetic_argument 토픽으로 현재 시간과 변수 a,b 발행
calculator
- arithmetic_argument 토픽에서 발행된 시간과 변수 a,b를 구독
- 서비스 클라이언트에게 연산자(+,-,*, /) 응답 요청
- operator가 보낸 연산자로 변수 a,b 연산 후 다시 operator에게 수신
- 연산결과를 arithmetic_checker 이름으로 액션 피드백을 checker로 전송
operator
- arithmetic_operator 서비스를 통해 calculator에게 연산자(+,-,*, /)를 랜덤으로 보냄
- calculator에게 받은 연산 결과를 터미널에 표시
checker
- 연산값의 합이 액션 목표를 넘기면 최종 연산 결과를 터미널에 표시
- 누적 한계치는 50으로 설정
인터페이스 패키지
인터페이스 파일 생성
먼저, 앞서 만들어뒀던 인터페이스 패키지ros_study_msgs에 이번 실습에 필요한 토픽, 서비스, 액션을 정의하는 파일을 작성해준다.
✔ ArithmeticArgument.msg
# Messages
builtin_interfaces/Time stamp # 시간 데이터 표현
float32 argument_a
float32 argumnet_b✔ ArithmeticOperator.srv
# Constants
int8 PLUS = 1
int8 MINUS = 2
int8 MULTIPLY = 3
int8 DIVISION = 4
# Request
int8 arithmetic_operator
---
# Response
float32 arithmetic_result
✔ ArithmeticChecker.action
# Goal
float32 goal_sum
---
# Result
string[] all_formula #연산공식 저장
float32 total_sum
---
# Feedback
string[] formula
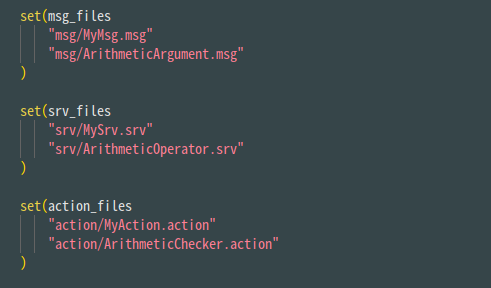
✔ CMakeLists.txt
set 명령어로 msg,srv,action 파일을 지정해준다.
set(msg_files
"msg/ArithmeticArgument.msg"
)
set(srv_files
"srv/ArithmeticOperator.srv"
)
set(action_files
"action/ArithmeticChecker.action"
)
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
${srv_files}
${action_files}
DEPENDENCIES builtin_interfaces
)
패키지 생성
ros2 pkg create ex_calculator --build-type ament_python --dependencies ros_study_msgs std_msgs rclpy
이렇게 하면 package.xml파일에 자동으로 의존성이 추가된다.
설정 파일 수정
✔ setup.py
console_scripts에 노드 실행 명령어를 추가해준다.
✔ param/arithmetic_config.yaml
노드에서 생성되는 랜덤 숫자의 범위를 지정한다.
/**: # namespace and node name
ros__parameters:
qos_depth: 30
min_random_num: 0
max_random_num: 9
qos_depth : 최대 저장 메시지 수
min_random_num : 노드에서 무작위로 숫자를 생성할 때 최소값
max_random_num : 노드에서 무작위로 숫자를 생성할 때 최대값
실행
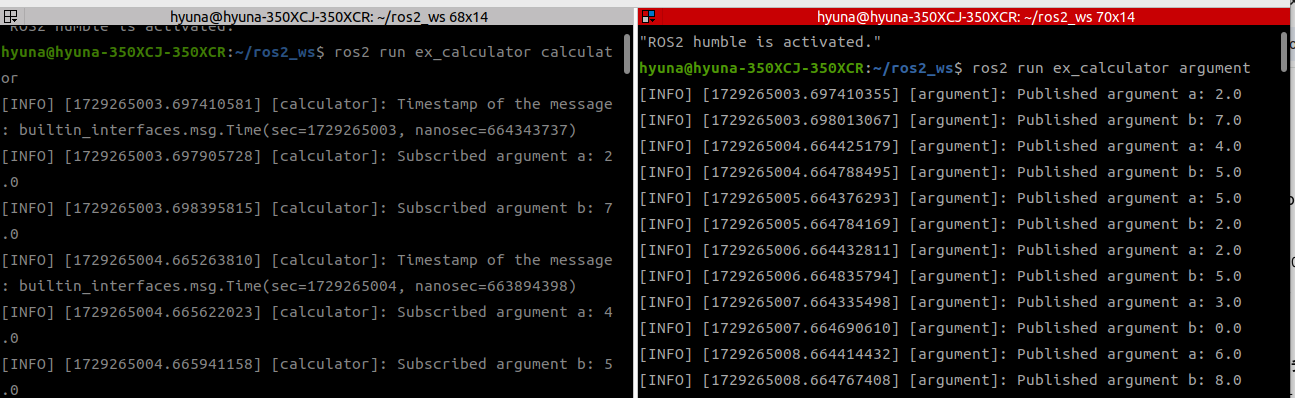
argument-calculator
서브스크라이버 argument - 퍼블리셔 calculator 순서로 실행해준다.
퍼블리셔를 먼저 실행하면 메시지 처음부터 구독할 수 없기 때문이다.
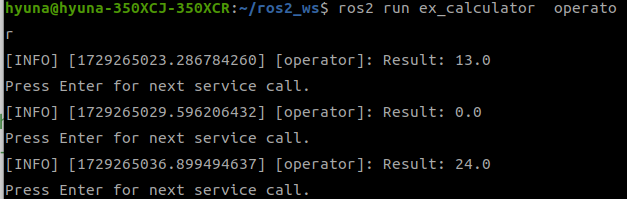
operator
서비스 operator를 실행한다.
랜덤하게 선택된 연산자로 연산된 결과를 확인할 수 있다.
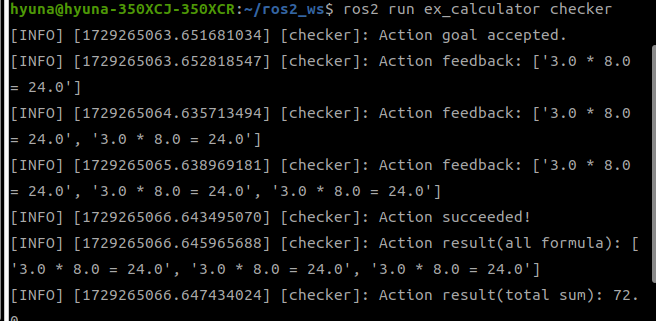
checker
액션 ckecker를 실행한다.
operator에서 어떤 연산자가 선택되어 계산된건지 확인할 수 있다.
누적한계치 50을 넘자 실행을 멈추었다. (Action result(total sum): 72.0)