지금까지 저희는 time response method로 제어 모델들을 해석하였습니다.
이번에는 frequncy response method로 한번 해석해보겠습니다.
Gain
제어공학을 다루며 gain이라는 말을 많이 들었고, 들을 것입니다.
Gain이란 다음을 말합니다.
추가적으로 DC gain이란, 주파수가 일 때의 gain을 뜻합니다.
Margin
margin이란 여유를 뜻하는 단어입니다. 제어공학에서의 margin은 gin margin과 phase margin 두 가지가 있습니다.
Gain Margin
Gain Margin()은 클 수록 시스템이 안정하고 제어 대상의 prameter 변화에 대한 강인성이 커지는 지표입니다.
Gain margin의 정의는 다음과 같습니다.
가 일 때, 가 인 곳으로부터 떨어진 정도를 나타냅니다.
따라서 값을 G.M.만큼 배율을 키워도 시스템이 안정하다는 것을 의미합니다.
Phase Margin
P.M. 역시 클 수록 시스템이 안정하다는 것을 나타내는 지표입니다.
이 1배(0db)이 될 때, 가 보다 작은 정도를
Phase Margin이라고 합니다.
따라서 만큼의 time delay가 추가 되더라도 시스템이 안정하다는 것을 의미합니다.
만약 이라면 로 근사할 수 있습니다.
BandWidth
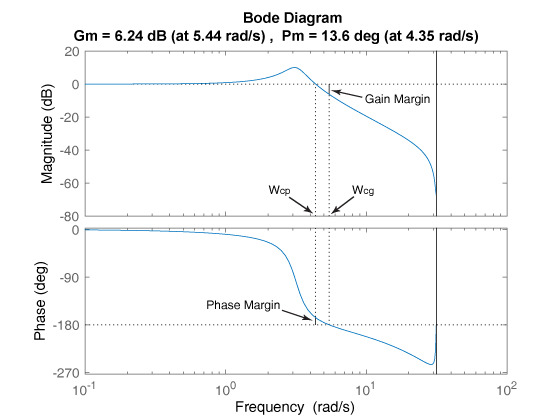
앞에서 배운 내용을 바탕으로 Gain Margin을 보면 Phase가 가 되는 부분에서 쭈욱 위로 올라가서 Magnitude가 0과의 여유가 얼마나 되는지가 표시되어 있는 것을 볼 수 있습니다.
Phase Margin의 경우 약간 반대로, Magnitude가 0인 부분에서 쭈욱 아래로 내려와 Phase가 가 되는 부분까지 얼마나 여유가 되어 있는지 표시되어 있습니다.
위의 보드 선도를 보면, 가 까지는 거의 gain이 0이라고 볼 수 있습니다.
하지만 그 이후 급격히 Phase가 떨어지게 됩니다.
Phase가 가 되면 입력과 출력의 상이 정반대이므로 대부분 발산하게 됩니다.
따라서 Phase가 에 가까워질수록 뒤쳐지므로 성능이 점점 감소하게 됩니다. 실제 성능 감소는 Magnitude를 보면 알 수 있습니다.
BandWidth란 성능(Magnitude)이 배 에서 배까지 감소하게 되는 주파수까지의 범위를 뜻합니다.
즉, 명령에 대한 출력의 추종성능을 의미합니다.
만약 open loop이고 이라면, 시점까지로 BandWidth를 근사할 수 있습니다.
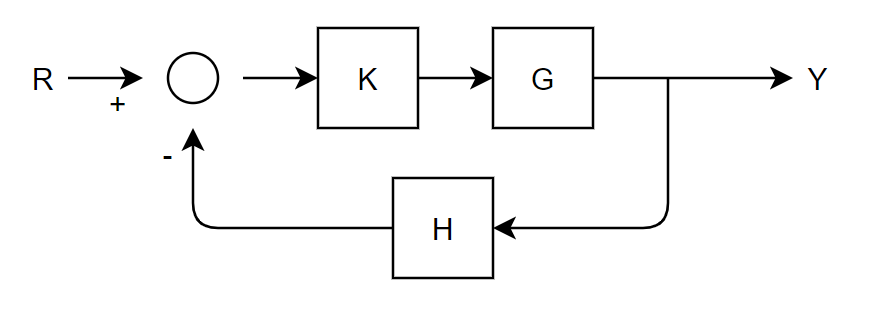
위의 블럭선도를 closed loop transfer function으로 나타내면 다음과 같습니다.
open loop transfer function은 다음과 같이 나타낼 수 있습니다.
Matlab Example
margin을 확인할 수 있는 코드입니다.
Phase가 로 무한히 수렴하고 있고, Magnitude는 음의 무한대로 발산하고 있기 때문에 Gain margin은 입니다.
s = tf('s');
G = 1/(s^2+0.5*s+1);
margin(G)
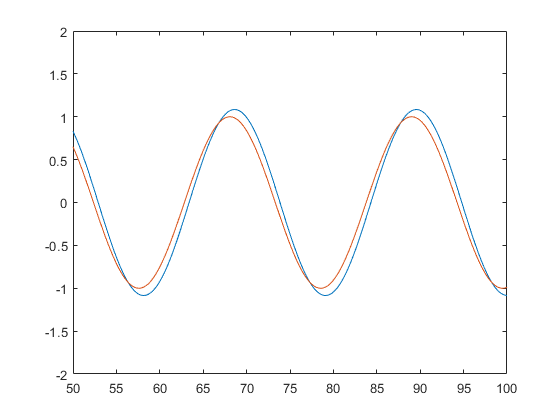
출력이 응답에 비해 약 정도 낮은 모습을 보여주고 있습니다.
G = 1/(s^2+0.5*s+1);
w = 0.3;
t = 0:0.1:100;
u = sin(w*t);
[y, t] = lsim(G, u, t);
plot(t, y, t, u)