드론을 처음 설정하다보니, Rudder, Elevator, Throttle, Aileron 같은 용어들을 구분하기 어려웠다.
이번 포스트에서는 드론 비행에 가장 기본이 되는 4가지 조종 축과 모드에 대해서 정리해본다.
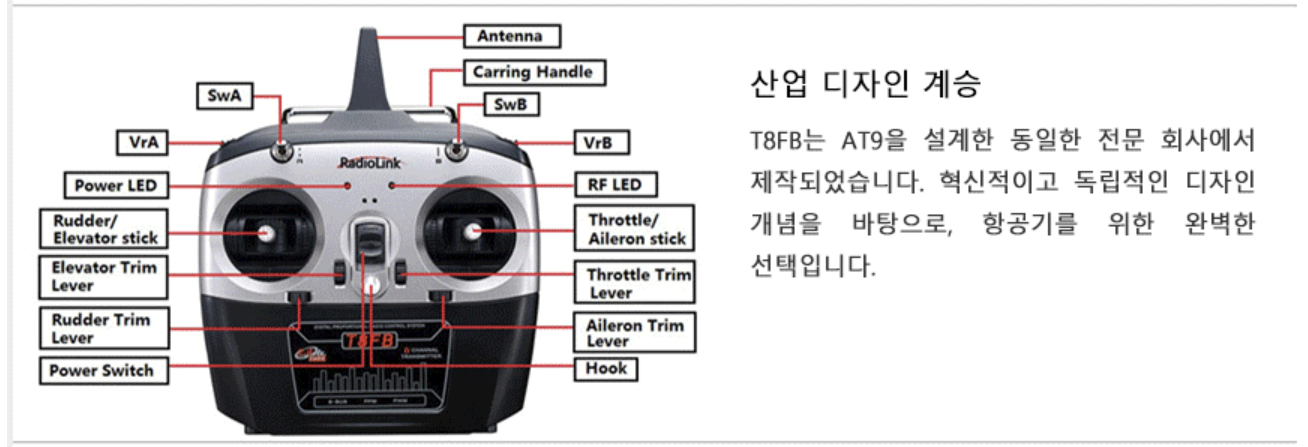
사용 제품
https://www.falconshop.co.kr/shop/goods/goods_view.php?goodsno=100002102
1. Rudder (Yaw)
- 역할: 기체의 방향 회전
- 동작: 좌회전 / 우회전
2. Elevator (Pitch)
- 역할: 앞, 뒤 이동
- 동작: 전진 / 후진
3. Throttle
- 역할: 고도 조절
- 동작: 상승 / 하강
4. Aileron (Roll)
- 역할: 좌, 우 이동
- 동작: 왼쪽 이동 / 오른쪽 이동
| 조종 축 | 용어 | 움직임 | 의미 |
|---|---|---|---|
| Rudder | Yaw | 좌/우 회전 | 방향 전환 |
| Elevator | Pitch | 전/후 이동 | 앞뒤 이동 |
| Throttle | 상/하 이동 | 고도 조절 | |
| Aileron | Roll | 좌/우 이동 | 측면 이동 |
드론 시동
픽스호크는 조종기의 Pitch를 아래로 내린 후, rudder를 오른쪽으로 당겨 3초 정도 유지하면 시동이 걸린다.
반대로 pitch를 아래로 내린 후 rudder를 왼쪽으로 당겨 3초 정도 유지하면 시동이 꺼진다.
픽스호크 비행 모드
나는 3단계를 조절할 수 있는 SwB를 통해 비행 모드를 설정하였다.
| 비행 모드 | GPS 필요 | 설명 |
|---|---|---|
| Stabilize | X | - 드론 4축 모두 사용자가 조작 - 기체의 정밀도나 바람의 영향에 따라 기체는 흘러갈 수 있음 - 모든 자동 비행 모드가 실패할 경우를 대비해 반드시 세팅해 두어야 하는 모드 |
| Alt Hold | X | - 현재의 고도를 유지하기 위해 스로틀을 자동으로 조절 - Pitch, Roll, Yaw는 사용자 마음대로 조절 가능 |
| Loiter | O | - 드론 4축 모두 조절 가능 - 스틱이 모두 중립으로 가면 그 자리에서 그대로 유지 |
추가 예정 모드
| 비행 모드 | GPS 필요 | 설명 |
|---|---|---|
| Auto | O | -미리 지정해둔 경로로 자동 비행 - Alt Hold 모드의 고도 제어와 Loiter 모드의 위치제어 기능이 통합된 것 |

Web-Front / SW-AI 개발자