이번엔 드론 프레임과 조종기 간 연결, 초기 세팅에 대해 다루어보고자 한다.
생각하지도 못하게 많은 역경들이 있었다...
사용하는 드론 컨트롤러는 픽스호크이며, 픽스호크를 제어하기 위해서는 미션플래너라는 툴이 필요하다.
픽스호크 연결과 세팅 또한 팰콘샵 유튜브에서 잘 다루고 있어 참고하면서 진행했다.
참고 영상
https://www.youtube.com/watch?v=2z6hNdNp8i0
해당 영상에서 사용한 미션플래너 버전은 1.3.80이고 내가 사용한 미션플래너의 버전은 1.3.83이다. 웬만한 옵션은 동일하여 그대로 따라갈 수 있었다.
아래는 버전 차이로 인해 찾기 힘들었던 옵션이나 발생 오류들에 대해서 다루어보고자 한다.
1. 표준 매개변수 위치
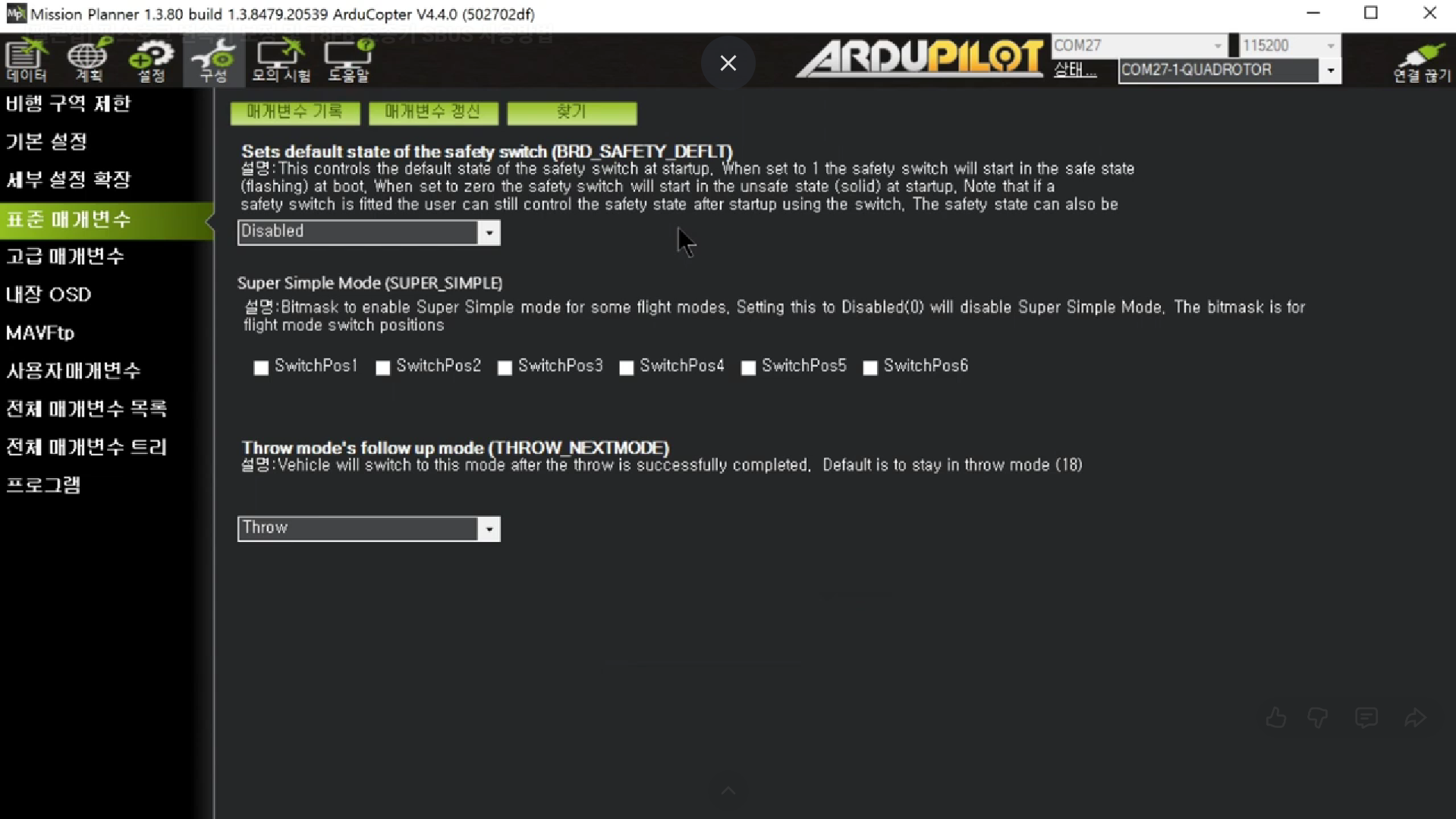
팰콘샵 영상에서는 "표준 매개변수" 위치가 상단바 "구성" 탭에 바로 있다. 하지만, 내 미션플래너에는 "구성" 탭에 표준 매개변수가 바로 있지 않고, "전체 매개변수 목록"에서 검색창에 원하는 파라미터들을 검색하여 사용할 수 있었다.
<사진>
2. 미션 플래너-픽스호크-조종기 연결
픽스호크에서의 상태 값을 확인하기 위해서는 컴퓨터(미션플래너)와 픽스호크를 USB로 연결해야했다. 게다가 조종기와의 통신이 원활한 지 확인하기 위해서는 픽스호크와 조종기간의 연결도 필요하다.
하지만, 픽스호크와 조종기를 먼저 연결하게되면 이미 픽스호크 부팅이 완료되어 추가 USB 연결 (미션플래너 연결)을 정상적으로 인식할 수 없다.
따라서, 픽스호크와 미션플래너 연결을 먼저 한 후, 조종기를 켜 연결해주면 모든 값을 미션플래너에서 확인할 수 있다.
연결 순서
1. 픽스호크-미션플래너 연결 (USB)
2. 픽스호크-조종기 연결 (RF)
- 픽스호크에는 USB를 통한 전원만 넣어주고 배터리 전원은 프로펠러에만 가게끔 연결해주면 된다.
(그냥 다 연결해도 픽스호크 내 전원 OR-ing 구조로 인해 고장은 안 난다)
3. 발생 오류
다음은 드론 시동 전 발생한 오류들이다.
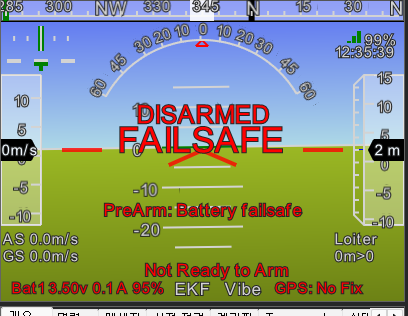
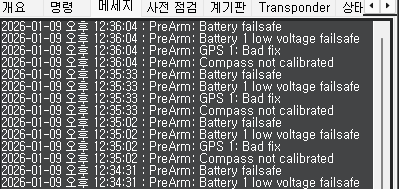
- battery failsafe
해당 오류는 잔여 배터리량때문에 발생하는 오류이다.
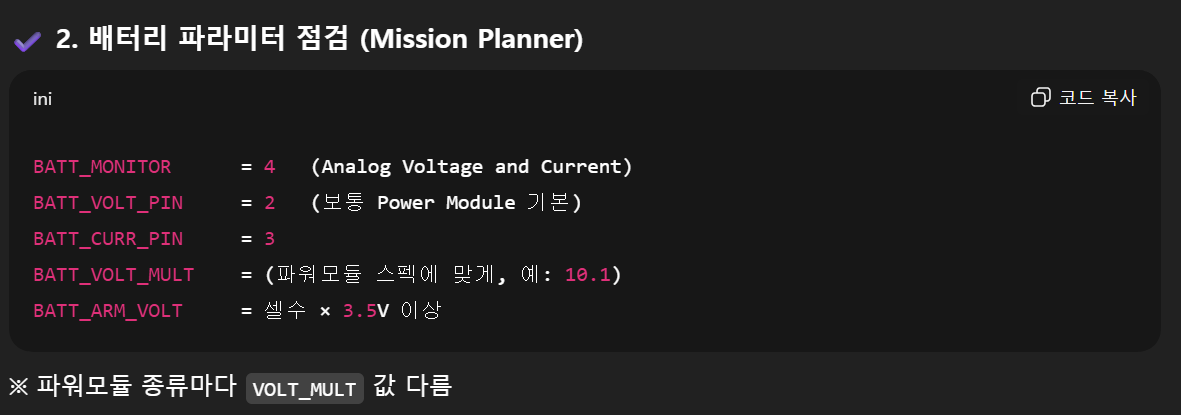
사용하는 배터리 종류를 찾아 파라미터를 수정해주면 된다.
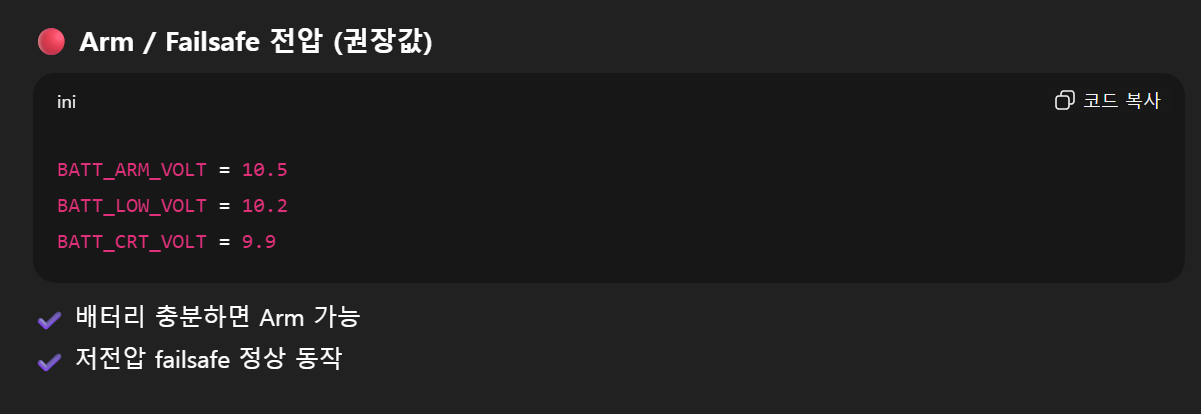
내가 사용하는 배터리는 아래와 같은데, 이에 상응하는 옵션 값은 GPT의 도움을 받아 설정했다.
리튬 배터리기 때문에 문제가 되지 않을 정도의 값들로 설정해주면 된다.

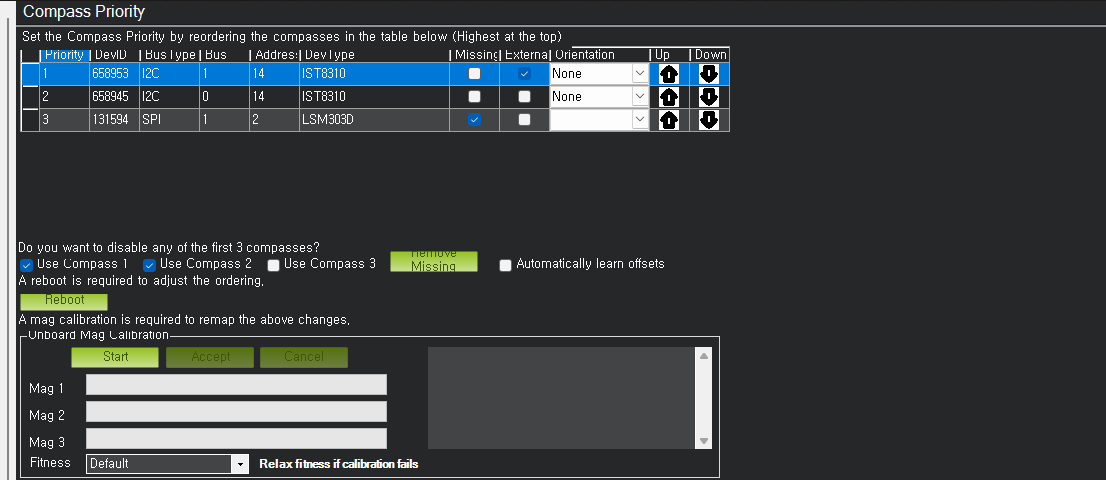
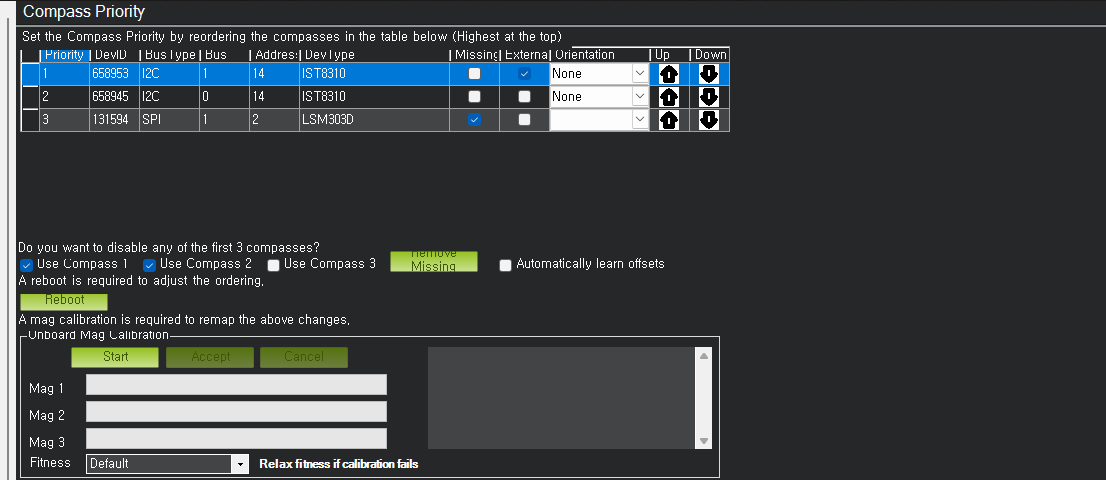
- Compass not calibrated
해당 오류는 불필요한 컴퍼스가 켜져 있기 때문이라고 한다.
팰콘샵 유튜브에서는 컴퍼스를 하나만 사용하는데, 내 픽스호크에는 3개가 켜져있었다.
다음 사진처럼 컴퍼스를 2개만 사용하도록 설정했더니 오류가 없어졌다.
<파라미터 설정 사진>