Gradient Boosting Machine
이번 글에서는 Boosting 알고리즘과 관련하여, 특히 함수추정과 예측 문제에서 뛰어난 성능을 보이는 Gradient Boosting Machine에 대해 살펴보고자 한다. 여기서는 GBM을 제안한 Jerome H. Friedman의 Greedy Function Approximation: A Gradient Boosting Machine 이라는 논문을 리뷰해보며 함수추정의 전반적인 내용과 GBM에 대해 살펴보도록 하겠다.
Function Estimation
함수 추정이란, 머신러닝의 예측 문제에서 머신러닝 모델을 개발하는 것과 동일하다. 즉, 예측변수를 바탕으로 반응변수의 추정치를 계산하는 함수 를 추정하는 것이다. 이때 이러한 과정은 어떠한 손실함수의 기댓값expected value을 최소화하는 방식으로 이루어진다. 손실함수 이 주어졌을 때, 함수 와 반응변수 를 이용한 데이터셋의 Loss는
와 같이 주어진다. 여기서 핵심은 에 대해 값을 최소화하는 것이다. 그런데, 아무것도 주어지지 않은 상태에서 어떤 함수를 추정하는 것은 불가능에 가깝다. 그렇기에 우리는 이러한 함수가 존재할 수 있는 함수들의 집합, 즉 함수족class of functions 를 정의하고, 함수족의 원소 중에서 손실함수으 최적화가 이루어지는 특정 함수 를 선택하는 것이다. 여기서 는 parameter들의 유한집합, 즉 함수족의 개별 함수들을 구분짓는 모수 집합이다. Boosting 알고리즘의 경우, 특별히 개별 함수들을 additive한 모델로 표현하여(Boosting - basis expansion과의 관계 참조) 모수화parameterization하였다. 즉,
의 형태를 취하는 함수들로 함수족 를 정의하기로 한다.
Numerical Optimization
Parameterization이 이루어지면, 함수 추정의 문제는 곧 모수 최적화parameter optimization의 문제로 변환된다. 즉, 기존의 함수 최적화 문제에서
의 모수 최적화 문제로 변환된다. 이러한 문제를 해결하기 위해서는 수치적 최적화과정이 필요한데, 이는 최적 모수 를
와 같이 단계별 successive increment들로 표현했을 때 각 단계에서의 increment를 계산하는 과정을 의미한다. 반면, parameterization 없이 non-parametic한 방법으로도 numerical optimization을 진행할 수 있다.
우선 함수 최적화 문제를 아래와 같이 numerical 한 형태로 표현할 수 있다.
여기서 대신 볼드체 로 표기한 이유는, 를 함수로 보지 않고 각 예측변수에 대한 함수값으로 구성된 근사함수(벡터)로 보기 때문이다. 즉, 이며,
로 주어진다. 이때 이처럼 함수를 수치적으로 근사하여 최적화 문제를 해결하는 방식을 (Non-parametic) Numerical Optimization이라고 하며, 이는 위 식 (1)을 successive increments 들의 합으로 해결한다. 즉,
으로 주어진다. 각각의 successive increment를 step 혹은 boost라고 하며, 인 경우의 은 초기값을 의미한다. Numerical optimization에서 각각의 연속적인successive 들은 직전 단계의 parameter vector 로부터 유도된다. 이때 새로이 이 계산될 때 이 추가되는 방식, 즉 increment vector 을 계산하는 방식에 따라 Numerical optimization의 큰 방식이 분류된다.
Steepest Descent
Steepest Descent 방식에서는 scalar , vector 에 의해 계산이 이루어지는데, 이때 gradient vector 은 Loss function의 그래디언트로
와 같이 에서의 의 그래디언트로 정의되며 Optimization은 각 step에서
으로 진행된다. 또한, 각 step마다의 학습정도를 나타내는 step length 은 다음 식의 해이다.
즉, 이러한 일련의 과정으로 current solution은 다음과 같이 update된다.
위와 같은 Steepest descent 방식은 가 가장 빠르게 감소하는 지점에서 decreasing이 일어나므로, 매우 greedy한 알고리즘으로 볼 수 있다.
Finite Data
앞선 nonparametic numerical optimization은 타당해보이지만, 만일 데이터셋이 처럼 유한하게 주어지고, 이를 바탕으로 joint distribution을 추정하는 경우 문제가 생긴다. 이 경우 에 대한 의 조건부 기대값 가 정확하게 추정될 수 없으며, 추정이 가능할지라도 실제 머신러닝 문제에서는 training data가 아닌 새로운 데이터셋에 대한 추정치를 구해야하는 상황이 요지이기 때문이다. 이를 해결하기 위해서는 앞선 식 (1)의 parameterized form을 이용해 다음과 같이 손실함수의 기댓값expected loss를 최소화하하는 문제로 치환해야한다.
이를 해결하기 위해, 다음과 같은 Forward-stagewise additive modeling과 유사한 greedy-stagewise approach를 생각해 볼 수 있다. 즉, 각 단계 에 대해
로 각 단계의 parameter들을 구하여
으로 update를 진행하는 방식이다. 여기서 이고 로 주어지면 이를 Boosting이라고 한다(Boosting 게시글 참고).
Gradient Boosting
그런데, 만일 앞선 최적화 과정에서 식 (2)에 대한 최적화 해가 쉽게 구해지지 않는다고 하자. 그러면 전 단계의 근사함수 에 대해 steepest-descent 방식으로 -dimensional vector인 steepest-descent step direction 을 구하는 방법을 고려해볼 수 있다. 그러나 이 그래디언트는 오직 training data 에 대해서만 정의되고, 다른 값들에 대해서는 일반화되기 어렵다.
따라서 다른 값에도 일반화하기 위해 Steepest-descnet의 을 이용한 최적화 과정 대신 를 이용해야 할 것이다. 이때 함수족 에서 에 가장 평행한parallel 함수를 고른다면 이는 전체 데이터 분포에 걸쳐 와 가장 큰 상관관계를 갖는 solution이 될 것이다. 이는 다음 식으로부터 구할 수 있다.
이렇게 얻어진 constrained negative gradient 를 steepest descent 알고리즘에 대입시켜 다음과 같이 을 구하고,
이로부터 다음과 같은 update 과정을 실행하면 된다.
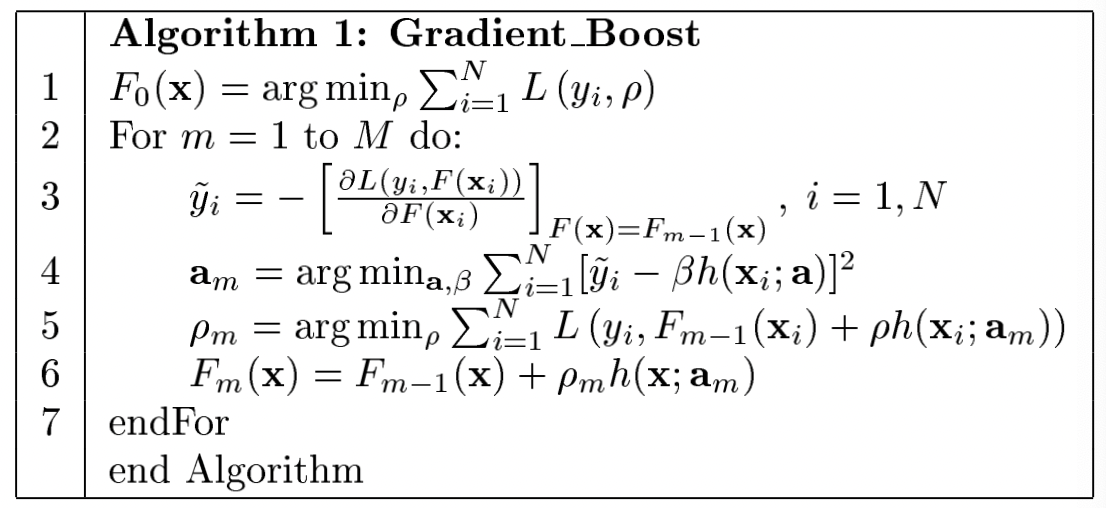
전체적인 알고리즘은 아래 그림과 같다.
Application
앞서 살펴본 GBM의 알고리즘은 다양한 손실함수와 모델에 대해 사용될 수 있다. 여기서는 논문에서 다룬 것들 중 대표적으로 OLS와 GBM Tree만 간단히 다루어보도록 하자.
Least-Squares Regression
Least Squares에서는 손실함수가 로 주어진다(미분의 편의를 위해 2로 나누어줌). 이를 바탕으로 다음과 같은 Gradient Boost가 이루어진 Least Squares 알고리즘을 고안할 수 있다.
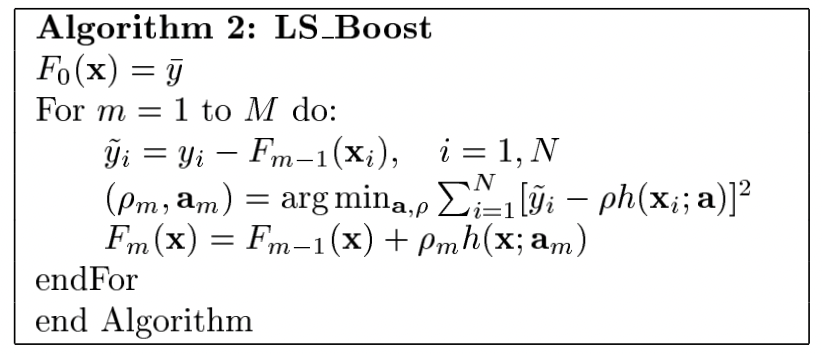
3번째 줄의 는 current residual을 의미하고, current residual을 fit하는 은 번째 단계에서 생성되는 회귀계수 을 의미한다.
Gradient-Boosted Tree(Regression)
여기서는 Terminal node가 개인 J-terminal node regression tree 모델을 살펴보도록 하자. 각각의 트리 모델의 base learner 는 우선 다음과 같은 additive한 형태로 나타낼 수 있는데,
여기서 base learner의 paremeter 로 작용하는 와 는 각각 region과 region에서의 상수값(constant)을 의미한다. 이때 Gradient Boost 알고리즘(Algorithm 1 참고)의 update line은
으로 이루어지며, 여기서 은 각 번째 단계에서의 terminal node들에 의해 정의된다. Gradient-Boost 알고리즘에서 각 pseudo-response()에 대한 예측은 이전 단계의 트리를 바탕으로 이루어지며, 이를 바탕으로 각 coefficients들은
으로 생성된다. 이때 위 식 (3)은 다음과 같이 볼 수 있는데,
여기서 을 의미한다. 그런데, 위 식은 각 단계에서 개의 basis function인 이 추가되는 것으로 볼 수 있으므로 각 에 대해 최적의 계수를 선택하여 적합도를 더 높이는 방안을 고안할 수 있다. 즉, 다음과 같이 를 구할 수 있다.
이때, 각 region들은 disjoint하기 때문에 위 식은 다음과 같이 축소되고, 이는 각각의 terminal region들에 대해 current approximation 을 바탕으로 최적의 constant를 update하는 과정이라고 볼 수 있다.
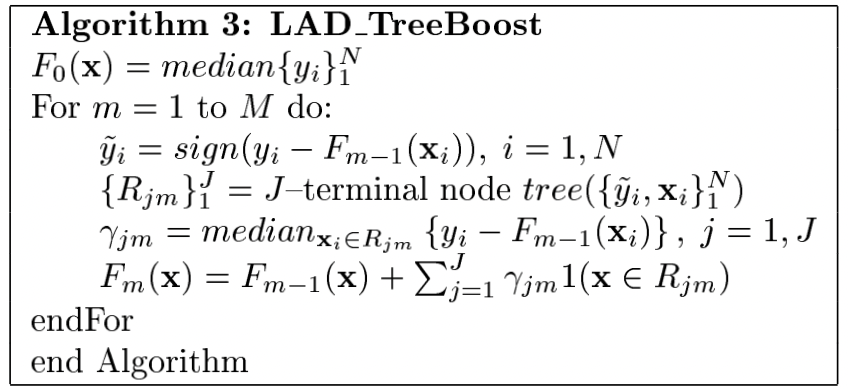
만일 Mean Absolute Error을 손실함수로 사용한다면(이를 LADLeast Absolute Deviance Regression이라고 한다), 각 계수들은 다음을 통해 구해진다.
전체적인 알고리즘은 다음과 같다.
Interpretation
GBM에서 추가적으로 주목해볼 수 있는 것은 각각의 예측변수들이 반응변수의 예측 과정에서 미치는 영향을 파악할 수 있다는 점이다. 즉, 함수 의 추정치 에 대해 각 변수 (열벡터)들의 상대적인 영향(relative influence) 를 측정할 수 있고, 그 예시로 다음과 같이 주어질 수 있다.
일반적인 Tree model 의 경우 위 식 (4)와 같은 형태로 를 직접 구할 수 없다. 따라서 이에 대한 추정치를 다음과 같은 방법으로 구한다.
여기서 개의 합으로 구성된 이유는 -terminal node tree 의 non-terminal node들로 오차합을 구하기 위함이다. 이때 는 각 노드 에 대한 splitting variable을, 는 각 노드 에 대해 split의 결과로 발생하는 Squared-error의 개선치를 나타낸 것으로 어떤 Region 이 subregions 로 split될 때 각 subregion들의 가중치와 y값들의 평균치를 이용해
로 주어진다. Gradient-Boosted Tree의 경우 Tree들의 합 으로 주어지므로, Influence 추정치는 다음과 같이 개별 트리들의 추정치들의 합 형태로 주어진다.
References
- The Elements of Statistical Learning
- Greedy Function Approximation: A Gradient Boosting Machine, Jerome Friedman, 1999
