Introduction
- Gang Scheduling에 EDF를 적용하는 방법에 대해 살펴본다.
- Gang EDF를 위한 schedulability condition을 제시한다
Definitions and Assumptions
- Parallel task is:
- rigid: 미리 정해져 있는 고정된 프로세서 수를 사용한다
- moldable: 프로세서 수는 변할 수 있지만, 실행 전에는 결정된다.
- malleable: 런타임에도 프로세서 수가 변할 수 있다.
- τi=(vi,Ci,Di,Ti): 사용하는 프로세서 수, 최대 실행 시간, 마감 기한, 주기
- moldable
- Ci 는 각 프로세서 중 제일 오래 걸리는 작업의 시간, synchronization overhead를 포함한다
- Constrained-deadline: Di≤Ti for all τi
- Fully independent & preemptive
- Ci는 vi에 의해 결정되고, vi는 유저나 스케줄러에 의해 결정된다.
- demand bound function dbf(τi,L):
dbf(τi,L)=max(0,⌊TiL−Di⌋+1)×Ci×vi(1)
- horizontal-damand bound function hbf(τi,L):
hbf(τi,L)=max(0,⌊TiL−Di⌋+1)×Ci=dbf(τi,L)×vi1(2) 이는 Ci×vi 직사각형의 너비(시간 축)으로 생각할 수 있다
Gang EDF Scheduling
- Global EDF에서는 항상 m개의 태스크를 선택할 수 있지만, Gang EDF에서는 공간적 제약이 필요하다.
- 먼저 ∑τ∈Qkvi≤m과 ∑τ∈Qk+1vi>m을 만족하는 earlist deadline의 k개의 태스크셋 Qk을 선택한다.
- 이들은 실행에 제약이 없다.
- 여기서 우리는 τj∈Qk+1∖Qk에 대해 m−∑τ∈Qkvi(<vj)만큼의 프로세서만 할당할 수 있다.
Gang scheduling vs Coscheduling


Gang EDF scheduling policy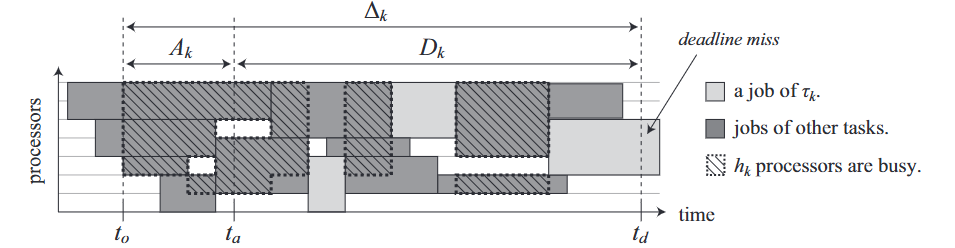
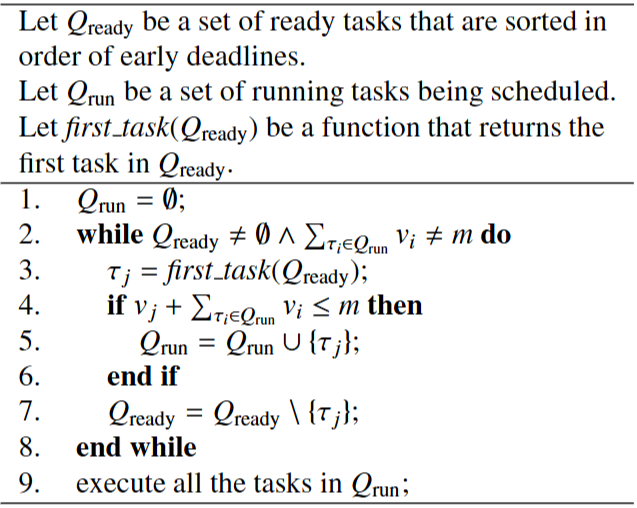
- first fit heuristic에 의해서 다음 작업을 넣을 수 있을 때 넣음.
Schedulability Analysis
- τk가 td에 deadline miss가 발생한다고 가정. - 이를 problemjob이라 부름.
- τk의 arrival time은 ta=td−Dk
- to는 ta보다 작거나 같고, vk개의 프로세서가 유휴상태인 가장 늦은 시점이라 정의한다.
- 이때 td−to=Δk라 정의한다.
- Deadline miss가 발생하기 위해서는 [ta,td)에서 다른 작업들의 실행이 Dk−Ck보다 길어야 한다.
- 또한, τk가 vk개의 프로세서를 동시에 사용해야 하기에, 적어도 m−vk+1 이상의 프로세서가 차단되는 시간이 Δk−Ck보다 커야 한다.
- 이를 interferencerectangle이라 정의한다.
wk=Δk−Ck(3) hk=m−vk+1(4)
- Ik(τi)는 [to,td)에서 τi에 의해 간섭당하는 시간을 의미하고, 앞의 식을 다음과 같이 정리할 수 있다.
τi∈τ∑Ik(τi)>wk×hk(5)
- 여기에서 만약 τi가 carry-in 작업이 없는 경우 I1(τi)라 표기하고, 있는 경우 I2(τi)라 표기한다.
Simple Bounds
τi가 carry-in 작업이 없는 경우, I1(τi)는 다음과 같이 구할 수 있다.
- i=k 인 경우, τi의 간섭 사각형에 대한 수평 기여도는 최대 hbf(τi,Δk)이며,
- 이는 τk의 간섭 사각형 너비를 초과할 수 없으므로, τk의 간섭 사각형에 대한 수평기여도는 다음과 같다.
min{hbf(τi,Δk),wk}
- 비슷한 이유로 간섭 사각형에 대한 수직 기여도는 다음과 같다.
min{vi,hk}
- i=k인 경우, 수평적 기여는 Ak=Δk−Dk를 넘을 수 없다.
- 이를 정리하여 I1(τi)를 나타내면:
I1(τi)={min{hbf(τi,Δk),wk}×min(vi,hk)min{hbf(τi,Δk)−Ck,Ak}×min(vi,hk)if i=kotherwise(6)
τi가 carry-in 작업이 있는 경우, I2(τi)는 다음과 같이 구할 수 있다.
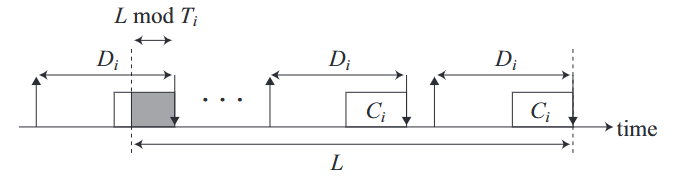
- τi의 어떤 작업의 deadline이 구간 L의 끝에 있고, τi의 모든 작업이 preemption없이 deadline전에 수행될 때의 horizontal demand를 hbf′(τi,L) 이라고 하자.

-
이는 위 그림을 통해 carry-in 작업의 양이 최대 min(Ci,LmodTi) 이고, 구간 내 작업의 개수는 ⌊L/Ti⌋임을 알 수 있다.
-
따라서 hbf′(τi,L)는 다음과 같다.
hbf′(τi,L)=⌊TiL⌋×Ci+min(Ci,LmodTi)(7)
-
hbf′(τi,L)이 위와 같으므로 I2(τi)는 다음과 같이 구할 수 있다.
I2(τi)={min{hbf′(τi,Δk),wk}×min(vi,hk)min{hbf′(τi,Δk)−Ck,Ak}×min(vi,hk)if i=kotherwise(8)
Improved Bounds
- Eq.(6)은 τi의 간섭을 과대평가한다는 점에서 비관적이다.
I1(τi)={min{hbf(τi,Δk),wk}×min(vi,hk)min{hbf(τi,Δk)−Ck,Ak}×min(vi,hk)if i=kotherwise(6)
Lemma 1
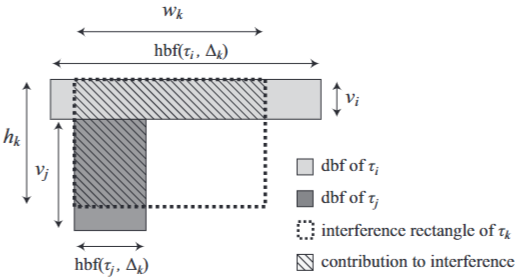
두 태스크 τi와 τj에 대해서 hk−vi≤vj≤hk 및 hbf(τj,Δk)≤wk≤hbf(τi,Δk)가 성립할 때 τk의 간섭사각형에 대한 I1(τj)+I1(τi)는 최대 다음과 같다.
wk×vi+hbf(τj,Δk)×(hk−vi)(9)
Lemma 2
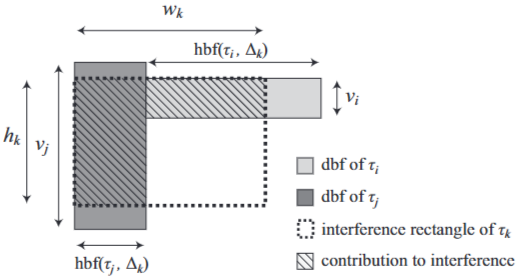
두 작업 τi와 τj(i=j=k)에 대해, vi≤hk≤vj 및 wk−hbf(τj,Δk)≤hbf(τi,Δk)≤wk인 경우 τk의 간섭사각형에 대한 I1(τj)+I1(τi)는 최대 다음과 같다.
{wk−hbf(τj,Δk)}×vi+hbf(τj,Δk)×hk(10)
이 두 보조정리는 다음 보조정리로 이어지게 된다.
Lemma 3
wk×hk 간섭 사각형은 hbf(τi,Δk)≥wk인 τi가 존재할 때, wk×(hk−vi)로 축소할 수 있다.
Lemma 4
wk×hk 간섭 사각형은 vi≥hk인 τi가 존재할 때, {wk−hbf(τi,Δk)}×hk로 축소할 수 있다.
따라서 우리는 앞의 Eq.(6)을 아래와 같이 바꿀 수 있다.
-
α1={τi=k∈τ∣hbf(τi,Δk)≥wk}라 할 때,
-
hk(α1)=hk−τi∈α1∑vi로 축소할 수 있고,
-
β1={τi∈/α1∣vi≥hk(α1)}라 할 때,
-
wk(β1)=wk−τi∈β1∑hbf(τi,Δk)로 축소할 수 있다.
- 우리는 이러한 크기 축소를 계속 반복할 수 있다.
- 그러면 hk(α0)=hk, wk(β0)=wk로 시작하여, 다음 식을 반복할 수 있다.
αs={τi=k∈/r<s⋃αr∪r<s⋃βr∣hbf(τi,Δk)≥wk(βs−1)}(11)
βs={τi=k∈/r≤s⋃αr∪r<s⋃βr∣vi≥hk(αs)}(12)
hk(αs)=hk−τi∈∑r≤sαr∑vi(13)
wk(βs)=wk−τi∈∑r≤sβr∑hbf(τi,Δk)(14)
- 이 과정을 αs나 βs가 공집합일때까지 반복하였을 때,
- 그 어느 αs또는 βs에 대해서도 포함되지 않은 태스크들의 집합을 γ라 하자.
γ={τi∈/α1∪...∪αmax∪β1∪...∪βmax}(15)
- 최종적으로 간섭 사각형은 wk(αmax)×hk(βmax) 로 축소된다.
- 그리고 γ의 정의에 따라 ∀τi∈γ는 hbf(τi,Δk)<wk(βmax), vi<hk(αmax)를 만족한다.
- 또한 αs에 포함된 집합은 hbf(τi,Δk)≥wk(βs−1)를 만족하고, βs에 포함된 집합은 vi≥hk(αs)를 만족한다.
- 따라서 우리는 I1을 다음과 같이 변경할 수 있다.
I1(τi)=⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧wk(βs−1)×vihbf(τi,Δk)×hk(αs)hbf(τi,Δk)×vimin{hbf(τi,Δk)−Ck,Ak}×viif τi∈αsif τi∈βsif τi∈γ∧i=kotherwise(16)
carry-in 작업이 있는 경우도 비슷하게 진행할 수 있다.
αs′={τi=k∈/⋃r<sαr′∪⋃r<sβr′∣hbf′(τi,Δk)≥wk(βs−1′)(17)
βs′={τi=k∈/⋃r≤sαr′∪⋃r<sβr′∣vi≥hk(αs′)(18)
hk(αs′)=hk−τi∈∑r≤sαr′∑vi(19)
wk(βs′)=wk−τi∈∑r≤sβr′∑hbf′(τi,Δk)(20)
γ′도 똑같이 정의하면,
γ′={τi∈/α1′∪...∪αmax′∪β1′∪...∪βmax′}(21)
다음과 같이 I2를 변경할 수 있다.
I2(τi)=⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧wk(βs−1′)×vihbf′(τi,Δk)×hk(αs′)hbf′(τi,Δk)×vimin{hbf′(τi,Δk)−Ck,Ak}×viif τi∈αs′if τi∈βs′if τi∈γ′∧i=kotherwise(22)
Schedulability Condition
- Idiff(τi)를 다음과 같이 정의하면, 이는 τi에 의한 carry-in 작업의 간섭 사각형에 대한 기여임이 자명하다.
Idiff(τi)=I2(τi)−I1(τi)(23)
- 따라서, Icarry-in을 모든 carry-in 작업의 간섭 사각형에 대한 기여로 정의하면, 다음과 같은 식을 얻는다.
Icarry-in={max{∑τi∈σIdiff(τi)}max{Idiff(τi)}if ∃σ⊂τotherwise(24) 여기서 σ는 ∑τi∈σvi≤m−vk를 만족하는 임의의 부분집합이다.
- 우리는 여기서 σ에 대한 계산을 해야하지만 이는 Knapsack 문제와 유사하며 이는 NP-hard임이 알려져있다.
이를 좀 더 쉽게 하기 위해 Icarry-in을 약간 과대평가해보자.
- τ의 복제본 τ′가 Idiff(τi)/vi를 기준으로 내림차순 정렬되어있다고 하자. 그리고 같으면 vi에 대해 정렬하자.
- 이때 τcarry-in를 다음을 만족하는 가장 첫번째 부분집합으로 선택하자.
τi∈τcarry-in∑vi≥m−vk
- Icarry-in을 τcarry-in로부터 구할 때, 간섭 사각형을 세로로 초과하는 vertical demand, 즉 m−vk를 초과하는 부분은 고려할 필요가 없다.
- 이때 τcarry-in의 마지막 태스크 τl이 실제로 사용할 수 있는 프로세서 수 nl′는 다음과 같다.
nl′=m−vk−τi∈τcarry-in∖τl∑vi.
- 따라서 우리는 Eq(24). 대신 아래와 같이 표현할 수 있다.
Icarry-in=τi∈τcarry-in∑Idiff(τi)−(vl−nl′)×Idiff(τl)(25)
- 그러므로 원래의 Eq(5)를
τi∈τ∑Ik(τi)>wk×hk(5)
- 다음과 같이 변경할 수 있다.
τi∈τ∑I1(τi)+Icarry-in>wk×hk(26)
Theorem 1
모든 작업 τk∈τ 및 모든 Δk≥Dk에 대해 다음 조건이 충족되면 작업 시스템 τ가 m 프로세서에서 Gang EDF에 의해 성공적으로 스케줄링되는 것이 보장된다.
τi∈τ∑I1(τi)+Icarry-in≤wk×hk?(27)
- 마지막으로 Δk의 범위를 유한한 범위로 줄이기 위해 Theorem 2를 제안한다.
Theorem 2
만약 어떤 Δk≥Dk에 대해 조건 (27)이 위반된다면, 이는 다음을 만족하는 Δk에 의해 위반된 것이다.
Δk≤hk−∑τi∈τUi×min(vi,hk)hkCk−∑τi∈τ{(Di−Ti)Ui×min(vi,hk)}+Ccarry-in(28)
Proof
I1(τi)≤hbf(τi,Δk)×min(vi,hk)≤(Δk−Di+Ti)×Ui×min(vi,hk).
또한 carry-in은 최대 Ci이므로, 다음 또한 유도할 수 있다.
I2(τi)≤I1(τi)+Ci×min(vi,hk).
조건 (27)을 위반시키면 아래와 같이 정리된다.
⇒⇒τi∈τ∑hbf(τi,Δk)×min(vi,hk)+Ccarry-in>wk×hkτi∈τ∑{(Δk−Di+Ti)×Ui×min(vi,hk)}+Ccarry-in>(Δk−Ck)×hkΔk≤hk−∑τi∈τUi×min(vi,hk)hkCk−∑τi∈τ{(Di−Ti)Ui×min(vi,hk)}+Ccarry-in
■