어떻게 기존의 RTA framework를 gang task model에 일반화하고, 기존 RTA의 구성요소를 어떻게 활용하나요?
Gang Scheduling의 특성을 RTA framework에 통합하여 비관성을 최소화하는 방법은 무엇인가요?
Assumptions
Gang task model
Global Preemptive scheduling
Work-conserving scheduling
Recent Work
Gang EDF Scheduling of Parallel Task Systems 에서는 EDF scheduling에서만 스케쥴 가능성을 도출하였고, 나머지 알고리즘에 대해 적용하는 방법은 다루지 않았습니다.
또한 이 방법은 Comments on "gang EDF schedulibility analysis"에서 결함이 있음이 나타났습니다.
Generalizing RTA Framework to Gang Scheduling
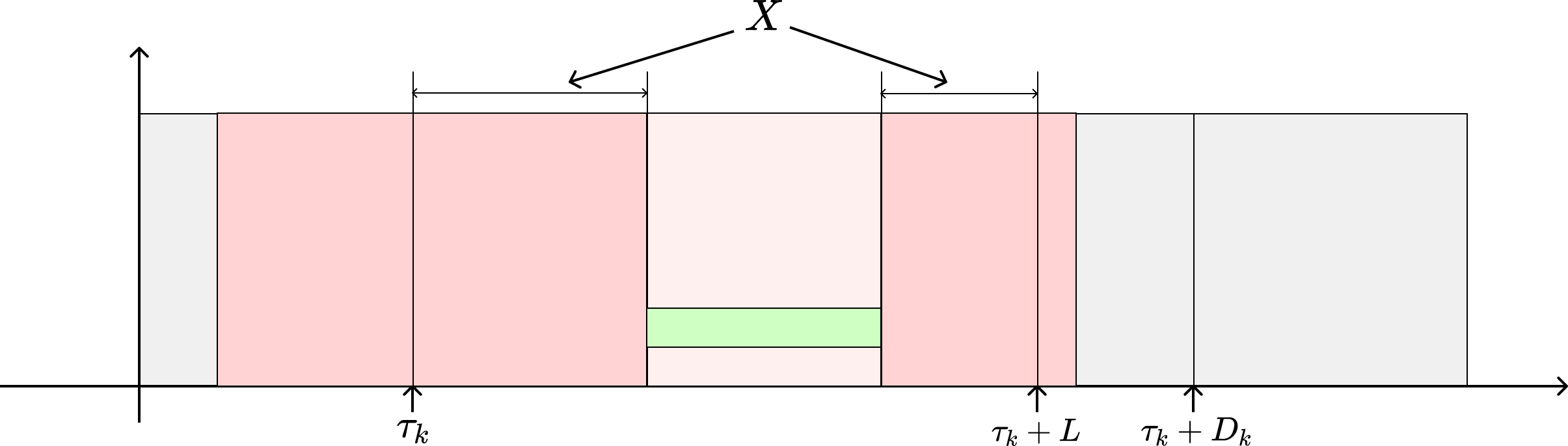
Definition 1 (mi=1) X를 τk의 target interval L에 대해서 τk가 active하지만 실행되지 못한 시간의 길이라고 정의하자.
만약 X가 (L−Ck+1) 보다 크다면 임의로 (L−Ck+1)개의 time slot을 X에서 선택하자.
X가 (L−Ck+1)보다 작다면 X의 전부를 선택하자.
여기에서 이 선택된 time slot들을 k-interference time slots of length L for τk라고 하자.
여기에서 우리는 (L−Ck+1)만큼의 k-interference time slots가 존재함이 τk가 L 안에 Ck만큼을 실행하지 못할
필요조건임을 알 수 있습니다.
Definition 2 Ik←i(L)는 k-interference time slots of length L for τk에서 τi의 실행시간으로 정의되며, 이를 duration of interference of τi on τk라고 하자.
앞에서 이야기했던 (L−Ck+1)만큼의 k-interference time slots가 존재함은 결국 ∑τi∈τ,τk=τiIk←i(L)=m⋅(L−Ck+1)로 정리할 수 있습니다.
따라서, 식 (1)(식 (2)와 동치)을 만족하는 Ck≤L≤Dk가 있다면 τk는 L 안에 Ck만큼을 실행할 수 있습니다.
τi∈τ,τk=τi∑Ik←i(L)<m⋅(L−Ck+1)(1)
⇔Ck+⌊m∑τi∈τ,τi=τkIk←i(L)⌋≤L(2)
Offline test에서 사용하기 위해 각 target 알고리즘에 대해서 Ik←i(L)의 upper bound Ik←i+(L)를 구해야 합니다.
이때 모든 τk∈τ에 대해서 Ik←i+(L)를 식 (1)에 대입하였을 때 성립한다면, Schedulable하다는 것을 알 수 있습니다.
이제 Gang Scheduling에 적용하기 위하여 mi=1 가정을 해제하고, 다음과 같이 정의할 수 있습니다.
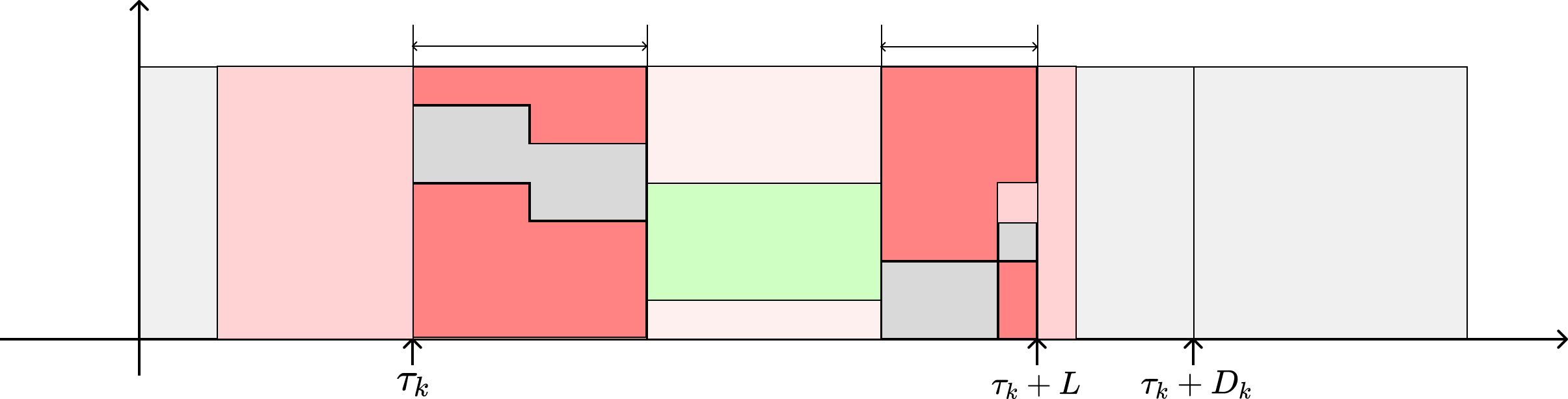
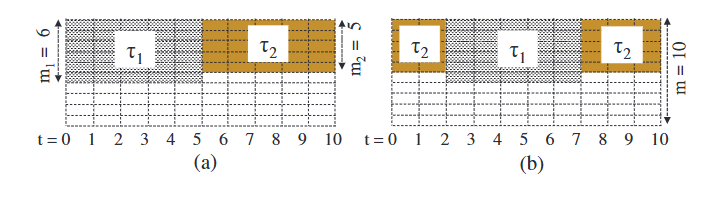
Definition 3 k-interference time slots 동안 (m−mk+1)개의 프로세서가 τk가 아닌 작업에 의해 점유되어야 한다.
만약 덜 점유되어있다면 k-interference time slots의 정의에 위배된다.
이때 우리는 임의로 (m−mk+1)개의 프로세서를 선택할 수 있고,
이때 선택된 프로세서들을 k-interference processors of k-interference time slots라고 하자.
(진한 빨간색이 k-interference processors of k-interference time slots)
여기에서 duration of interference(1차원)도 amount of interference(2차원)로 일반화할 수 있습니다.
Definition 4 Ak←i(L)은 k-interference processors of k-interference time slots에서 τi의 실행양으로 정의되며, 이를 amount of interference of τi on τk라고 하자.
그러면 다음 lemma를 통해 작업이 실행을 완료하지 못할 정확한 조건을 도출해낼 수 있습니다.
Lemma 1
식 (3)은 τk가 L 안에 Ck만큼을 실행하지 못할 필요충분조건이다.
τi∈τ,τi=τk∑Ak←i(L)=(m−mk+1)⋅(L−Ck+1)(3)
Proof
충분조건
만약 식(3)이 성립한다면 정의에 의해 각 k-interference time slots에 대해서 (m−mk+1)개의 프로세서가 τk가 아닌 작업에 의해 점유되어야 하므로, τk는 L 안에 Ck만큼을 실행하지 못합니다.
필요조건
만약 τk가 L 안에 Ck만큼을 실행하지 못한다면, 적어도 (L−Ck+1)의 time slot동안 실행되지 못해야 하며,
정의에 의해 (m−mk+1)개의 프로세서가 τk가 아닌 작업에 의해 점유되어야 하므로, 식(3)이 성립합니다.
Lemma 1을 부정함으로써 Theorem 1을 도출할 수 있습니다.
Theorem 1
만약 식 (4)를 만족하는 Ck≤L≤Dk가 존재한다면 τk는 L 안에 Ck만큼을 실행할 수 있다.
τi∈τ,τi=τk∑Ak←i(L)<(m−mk+1)⋅(L−Ck+1)(4)
⇔Ck+⌊m−mk+1∑τi∈τ,τi=τkAk←i(L)⌋≤L(5)
또한 Ak←i(L)의 상한 Ak←i+(L)를 모든 τk에 대해서 유도하였고, 모든 τk에 대해서 Ak←i+(L)에 대해 식 (4)를 만족한다면 타겟 알고리즘에 대해 τ는 schedulable하다.
이때 τk에 대한 최소 L을 τk의 response time Rk라고 정의한다.
Proof
식 (4)를 만족하지만 L안에 τk가 완료되지 않음을 가정한다면 Lemma 1에 의해 모순이 발생합니다.
정리의 두번째 부분은 Ak←i(L)≤Ak←i+(L)이므로 만족합니다.
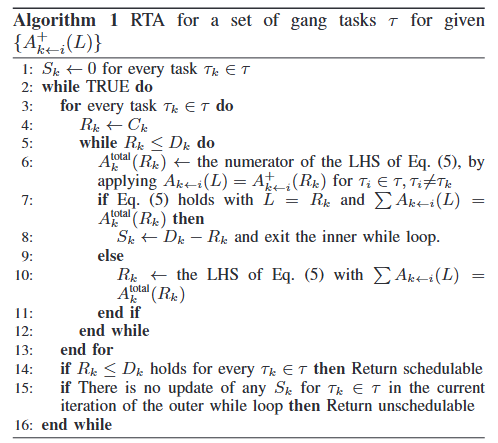
이를 통해 우리는 다음과 같은 알고리즘을 도출할 수 있습니다.
이는 Slack Sk를 이용하며, Sk가 양수라면 모든 τk의 작업들이 deadline보다 Sk만큼 먼저 완료될 수 있음을 의미합니다.
위 식에서 Ak←i+(L)를 구하기 위해서 Ak←i(L)를 Ik←i(L)와 processors of interest의 개수로 분해할 수 있습니다.
Lemma 2
Ak←i(L)≤Ik←i(L)⋅min(mi,m−mk+1)(6)
Proof k-interference time slots과 k-interference processors의 정의에 의해 Ak←i(L)는 Ik←i(L)와 min(mi,m−mk+1)의 곱으로 제한된다는 것을 알 수 있습니다.
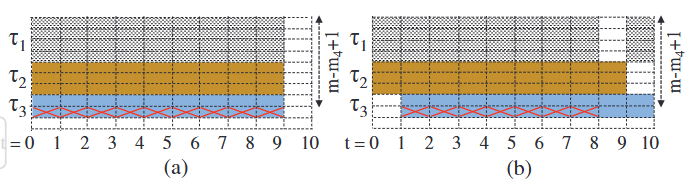
AkΔ=∑x=1∣τ′∣Ak←xΔ 이고, msum(i)=∑x=1imin(mi,m−mk+1) 일 때, Ak←xΔ는 τ1부터 τ∣τ′∣까지 차례대로 계산된다.
Ak←xΔ=⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧IkΔ(i)⋅min(mi,m−mk+1)IkΔ(i)⋅(msum(i)−(m−mk+1))0if msum(i−1)>m−mk+1 and IkΔ(i)>0;else if msum(i)>m−mk+1 and IkΔ(i)>0;otherwise.
(15)
Proof
else if의 경우는 Lemma 6을 이용하여 증명할 수 있습니다.
otherwise는 아무것도 빼지 않으므로 증명됩니다.
if의 경우를 보면 이미 i−1 tasks만으로도 ∑x=1i−1min(mi,m−mk+1)>m−mk+1이 성립하므로, IkΔ⋅mi가 전부 ∑τi∈τ′Ak←i(L)에 기여하지 못함을 알수 있습니다.
따라서 이를 모두 제거해주면 if를 증명할 수 있습니다.
여기까지 계산하는 방법을 Algorithm 3에 정리하였습니다.
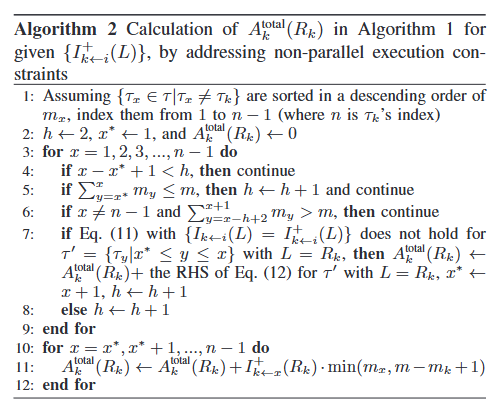
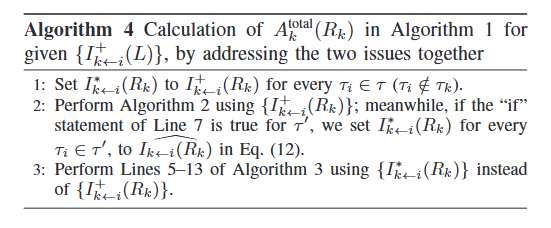
Algorithm 2와 3을 사용하기 위해서 우리는 두 알고리즘을 결합해야 합니다.
Algorithm 2에서는 그대로 Ik←i+(L)를 사용하고 그 동안 Ik←i∗(L)를 Ik←i(Rk)로로 업데이트합니다.
Algorithm 3에서는 Ik←i+(L)를 Ik←i∗(L)로 대체합니다.
Theorem 7
Algorithm 1의 Line 6을 Algorithm 4로 대체하고, Ik←i+(L)를 식 (7) 또는 (8)로 대체한다면, 각각 FP와 EDF에 대한 schedulability test를 수행할 수 있다.
Proof
Algorithm 1, Lemma 2, 식 (7) 또는 (8)에 의해 남은 증명은 Algorithm 4를 통해 계산한 Aktotal(Rk)가 ∑τi∈τAk←i(Rk)의 upper bound임을 보이는 것입니다.
먼저 Algorithm 2의 기초인 Theorem 3에서는 ∑τi∈τAk←i(Rk)의 안전한 upper bound를 구하기 위해 각 Ik←i+(L)에 대하여 duration constraint를 유지할 때까지 가장 큰 mi를 선택합니다.
따라서 Algorithm3에서 Algorithm 2를 수행한 다음 Line 3에서 Algorithm 3을 수행하는 경우, 다른 선택이 더 큰 upper bound를 만들 수 없음을 증명하는 것으로 충분합니다.
Ik←i′(Rk)을 Ik←i(Rk)와 다른 선택이라고 정의합시다.
일단 h=g=2, 즉 mh+mj>m인 경우만 가정합니다. 다른 경우에서의 증명도 비슷합니다.
τh와 τj 사이에 딱 1 time unit을 교환했다고 가정합시다.
즉 Ik←h′(Rk)=Ik←h(Rk)−1, Ik←j′(Rk)=Ik←j(Rk)+1이라 합시다. 나머지 Ik←i′(Rk)는 Ik←i(Rk)와 같습니다.
이때 원래 interference로부터 감소하는 양은 min(mh,m−mk+1)=min(mj,m−mk+1)≤0입니다.
따라서, 남은 증명은 min(mh,m−mk+1)=min(mj,m−mk+1)≤0이 Algotihm 3에서 감소하는 interference의 upper bound임을 보이는 것입니다.
만약 Ik←i′(Rk)으로 Ik←i(Rk)를 대체한다면, 단 하나의 차이점은 한개 time slot에 대해서 min(mh,m−mk+1)=min(mj,m−mk+1)만큼의 기여가 줄어드는 것 뿐입니다.
즉 AkΔ는 많아야 min(mh,m−mk+1)=min(mj,m−mk+1)만큼 줄어들고, 즉 전체 upper bound가 1의 time unit을 바꾼다고 해서 더 커지지 않음을 증명합니다.
이 과정을 계속 반복하면 Ik←i(Rk)의 어떤 다른 선택도 upper bound를 더 키우지 않음을 증명할 수 있고, Theorem 7이 증명됩니다.
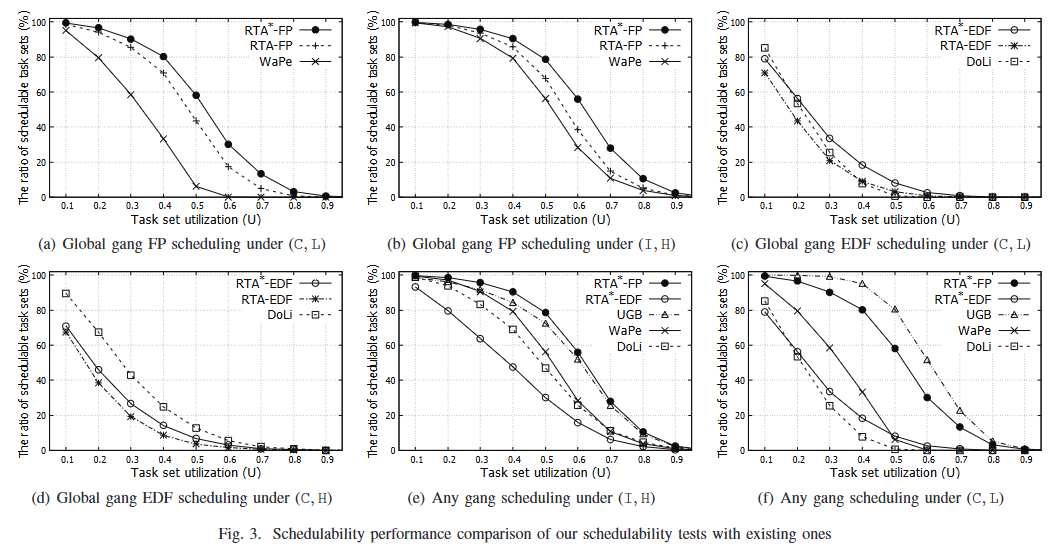
Evaluation
WaPe: global scheduling for FP
DoLi: global scheduling for EDF
UGB: non-global scheduling (i.e., a generalization of partitioned scheduling) for FP