Monte Carlo Algorithms
우리는 모델에 대한 정보 없이 학습하기 위하여 샘플을 사용할 수 있다.
이 방법을 몬테 카를로라고 부르며, 이는 MDP에 대한 지식이 필요 없는 model-free 알고리즘이다.
Monte Carlo: Bandits
간단한 예제로 Multi-armed Bandit을 생각해보자.
각 action에 대하여 reward sample의 평균은 다음과 같다.
qt(a)=∑i=0tI(Ai=a)∑i=0tI(Ai=a)Ri+1≈E[Rt+1∣At=a]
이는 다음과 같다.
qt(At)=qt(At)+Nt(At)1(Rt+1−qt(At))qt+1(a)=qt(a),∀a=At
Monte Carlo: Bandits with States
이는 bandit 들을 각각 다른 상태로 생각한다.
- episode는 아직 한 스텝으로 계산하며
- action은 state 변화에 영향을 끼치지 않는다.
그러면 우리는 다음을 계산하면 된다.
q(s,a)=E[Rt+1∣St=s,At=a]
이런 bandit을 contextual bandits라고 부른다.
Introduction Function Approximation
Value Function Approximation
우리는 지금까지 거의 룩업 테이블을 고려해왔다.
- 모든 상태 s는 v(s) 엔트리를 가진다.
- 또는 모든 상태-액션 페어 s,a가 q(s,a)를 갖는다.
그런데 이러면 커다란 MDP에서는 이런 문제들이 생긴다.
- 메모리 상에 저장해야할 상태나 액션들이 너무 많아진다.
- 그리고 각각의 상태에 대한 value를 개별적으로 학습하는 것이 너무 느리다.
- 각각의 상태는 보통 fully observable이 아니다.
그래서 해결법을 제시한다.
- function approximation을 통하여 value function을 추정한다.
vw(s)≈vπ(s)orv∗(s) qw(s,a)≈qπ(s,a)orq∗(s,a)
- Monte Carlo 나 Temporal-Difference 학습을 이용하여 매개변수 w를 업데이트 한다.
- 보이지 않는 상태에 대해서도 일반화한다.
Agent state update
큰 MDP에 대하여 환경이 fully observable이 아니라고 가정하자.
이때 다음과 같이 agent state를 정의하자. (w∈Rn)
St=uw(St−1,At−1,Ot)
이제부터 St는 agent state를 의미한다.
이를 우리는 agent 내부의 vector 또는 간단한 케이스에서는 단순히 현재 관측값이라고 볼 수 있다. St=Ot
여기서는 어떻게 agent state update를 학습할 지에 대해선 얘기하지 않을 것이다.
Linear Function Approximation
Feature vectors
다음과 같이 feature vector를 이용하여 상태를 표현해보자.
x(s)=⎝⎜⎜⎛x1(s)⋮xm(s)⎠⎟⎟⎞
x:S→Rm은 agent state에서 feature로의 고정된 매핑이며, 간략하게는 xt=x(St)라고 쓸 수 있다.
예를 들면 이런 곳에 적용할 수 있다.
- 랜드마크로부터의 로봇의 거리
- 주식시장에서의 경향
- 체스에서 기물들과 폰의 배치
Linear Function Approximation
value function을 feature들의 선형 결합을 통해 근사한다.
vw(s)=wTx(s)=j=1∑nxj(s)wj
여기에서 loss는 w에 대한 이차식으로 나타난다.
L(w)=ES∼d[(vπ(S)−wTx(S))2]
여기세서 stochastic gradient descent를 사용하면 global optimum으로 수렴하게 되며, 업데이트 수식은 간단하다.
∇wvw(St)=x(St)=xt⇒Δw=α(vπ(St)−vw(St))xt
즉 업데이트는 step-size와 prediction error, feature vector를 곱한 값으로 이루어진다.
Table Lookup Features
Table Lookup은 linear value function approximation의 특별한 케이스다.
n 상태들이 S={s1,⋯,sn}으로 주어진다고 하자.
이때 다음과 같은 one-hot feature를 사용하자. 여기서 one-hot은 해당하는 값을 제외한 모든 값은 0이 되는 벡터를 의미한다.
x(s)=⎝⎜⎜⎛I(s=s1)⋮I(s=sn)⎠⎟⎟⎞
parameter w는 오직 각 상태에 대한 value 추정값만을 들고 있게 된다.
v(s)=wTx(s)=j∑wjxj(s)=ws
Monte Carlo Algorithms
Bandits with States
다시 앞으로 돌아와서 살펴보자. q는 neural network와 같은 매개변수 함수가 될 것이며, 우리는 loss를 다음과 같이 나타낼 수 있다.
L(w)=21E[(Rt+1−qw(St,At))2]
그러면 gradient update는 다음과 같을 것이다.
wt+1=wt−α∇wtL(wt)=wt−α∇wt21E[(Rt+1−qw(St,At))2]=wt+αE[(Rt+1−qw(St,At))∇wtqwt(St,At)]
여기서 우리는 Stochastic Gradient Update를 얻기 위해 샘플을 사용할 수 있다.
이건 그저 회귀일 뿐이므로 커다란 상태 공간에서도 잘 작동한다.
linear function q(s,a)=wTx(s,a)를 사용하면,
∇wtqwt(St,At)=x(s,a)
가 될 것이며, 이때 SGD update는 다음과 같을 것이다.
wt+1=wt+α(Rt+1−qw(St,At))x(s,a)
- Linear update에서는 step-size × prediction error × feature vector
- Non-Linear update에서는 step-size × prediction error × gradient
가 되는 것이다.
Monte-Carlo Policy Evaluation
이제 우리는 순차적 결정 문제를 고려할 수 있다.
목표: 정책 π에 의한 경험들로부터 vπ를 학습하기
S1,A1,R2,⋯,Sk∼π
return은 전체 discounted reward이다. (T>t에 대하여):
Gt=Rt+1+γRt+2+⋯+γT−t−1RT
이때 value function은 return의 기댓값이다.
vπ(s)=E[Gt∣St=s,π]
우리느 간단히 표본평균을 모평균 대신 사용할 수 있으며, 이를 우리는 Monte-Carlo Policy Evaluation이라고 부른다.
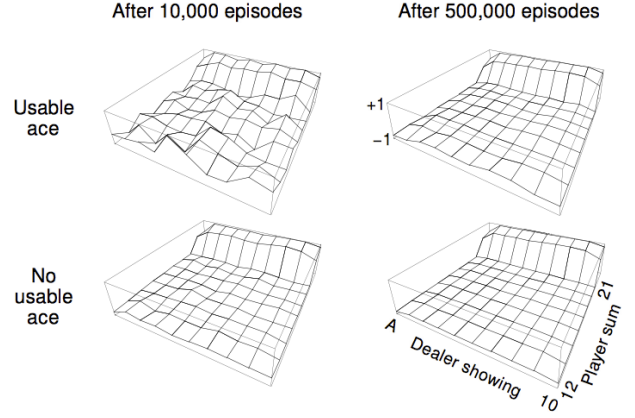
Example: Blackjack
- States
- 현재 총합 (12 ~ 21)
- 딜러가 보여주고 있는 카드 (ace ~ 10)
- 내가 사용할 수 있는 ace를 갖고 있는가? (yes or no)
- Action
- stick: 카드 받기를 멈춘다.
- draw: 다른 카드를 한장 뽑는다. (비복원)
- Stick에 대한 Reward
- 카드의 합이 딜러 카드의 합보다 크면 +1
- 카드의 합이 딜러 카드의 합과 같으면 0
- 카드의 합이 딜러 카드의 합보다 작으면 -1
- Draw에 대한 Reward
- 카드의 합이 21보다 커지면 -1 (그리고 종료)
- 나머지 경우에는 0
- 카드의 합이 12보다 작다면 자동 Draw
이 예제에서 MC Approximation을 사용하여 학습을 시키면 상태별로 아래와 같은 결과를 얻을 수 있다.
Monte-Carlo Learning의 단점
우리는 Value prediction을 학습하기 위해 사용할 수 있는 MC algorithm들을 봐왔다.
그러나 에피소드 자체가 길어지면, 학습이 느릴 수도 있다.
- 학습을 시작하기 전에 일단 그 에피소드가 끝나야 한다.
- 또한 return이 높은 분산을 가질 수 있다.
이에 대한 대안을 소개한다.
Temporal-Difference Learning
Sampling Bellman Equations
이전 시간에 Bellman equation과 iterating을 통한 근사법에 대하여 배웠었다.
vπ(s)=E[Rt+1+γvπ(St+1)∣St=s,At∼π(St)]vk+1(s)=E[Rt+1+γvk(St+1)∣St=s,At∼π(St)]
이걸 우리는 아래처럼 표본화할 수 있다!
vt+1(St)=Rt+1+γvt(St+1)
이건 꽤 노이즈가 클 것 같다. 이를 위해 파라미터 α를 통하여 스텝을 작게 만들 수 있다.
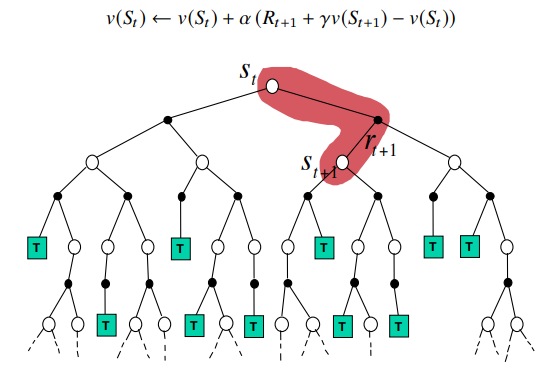
vt+1(St)=vt(St)+αt⎝⎜⎛targetRt+1+γvt(St+1)−vt(St)⎠⎟⎞
Temporal difference learning
Prediction setting: policy π 하에 이뤄진 경험을 통하여 vπ를 온라인 학습
- Monte-Carlo
vn(St)를 표본 return Gt를 통해 업데이트 함.vn+1(St)=vn(St)+α(Gt−vn(St))
- Temporal-difference learning
vt(St)를 추정 return인 Rt+1+γv(St+1)를 통해 업데이트 함vt+1(St)=vt(St)+αt⎝⎜⎛targetRt+1+γvt(St+1)−vt(St)TD error⎠⎟⎞ δt=Rt+1+γvt(St+1)−vt(St)를 TD error라고 부른다.
Summary: DP,MC,TD Backup
Dynamic Programming Backup
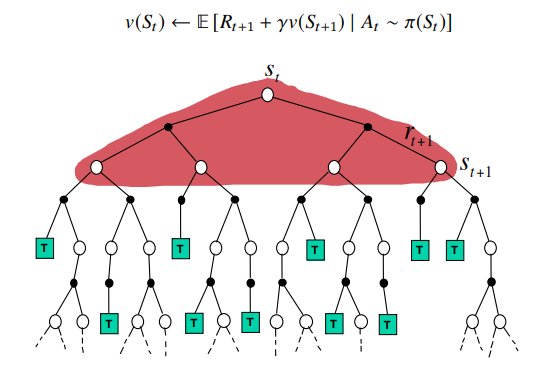
Monte-Carlo Backup
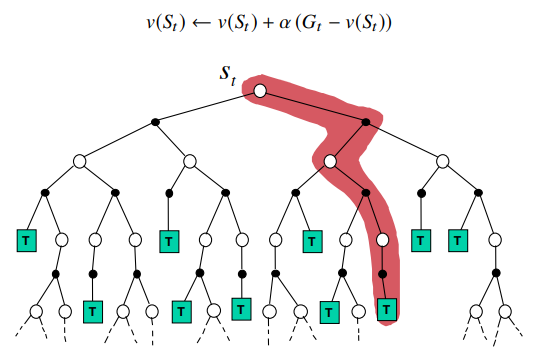
Temporal-Difference Backup
Bootstrapping and Sampling
- Bootstraping: 업데이트가 estimate를 필요로 함
- MC: does not bootstrap
- DP: bootstraps
- TD: bootstraps
- Sampling: 표본 기댓값을 통해 업데이트함
- MC: samples
- DP: does not sample
- TD: samples
Again: Temporal difference learning
우리는 같은 아이디어를 action value에도 적용할 수 있다.
- qt(St,At)를 추정 return인 Rt+1+γq(St+1,At+1)를 통해 업데이트 함
qt+1(St,At)=qt(St,At)+αt⎝⎜⎛targetRt+1+γqt(St+1,At+1)−qt(St,At)TD error⎠⎟⎞
이 알고리즘은 SARSA라고도 부르는데, (St,At,Rt+1,St+1,At+1)을 사용하기 때문이다.
TD는 model-free이며, 경험으로부터 직접 학습한다.
TD는 완료되지 않은 episode에 대해서도 bootstrapping을 통해 학습할 수 있으며, 그렇기에 episode가 진행중일때에도 학습할 수 있다.
Comparing MC and TD
MC vs TD
- TD는 최종 결과를 알기 전에도 학습할 수 있다.
- TD는 각 step 이후에 online으로 학습할 수 있다.
- MC는 무조건 return이 나오기 전까지 episode가 끝나는 것을 기다려야 한다.
- TD는 최종 결과가 없어도 학습할 수 있다.
- TD는 incomplete sequence를 통해서도 학습할 수 있다.
- MC는 complete sequence를 통해서만 학습할 수 있다.
- TD는 끊이지 않는 환경에서도 작동한다.
- MC는 끊어지는 환경에서만 작동한다.
- TD는 예측에 걸리는 시간과 독립적이다.
- TD는 단일 트랜지션에서도 학습할 수 있다.
- MC는 episode가 끝날때 업데이트하기 위해 모든 예측을 저장하여야 한다.
- TD는 합리적인 value estimate가 필요하다.
Bias/Variance Trade-off
-
MC의 리턴값 Gt=Rt+1+γRr+2+⋯는 vπ(St)의 unbiased 추정값이다.
-
TD의 타겟 Rt+1+γvt(St+1)는 vπ(St)의 biased 추정값이다. (vt(St)=vπ(St)가 아니라면)
-
그러나 TD target은 더 낮은 분산을 갖는다.
- MC return은 많은 랜덤 액션, 트랜지션, 리워드의 영향을 받지만
- TD target은 하나의 랜덤 액션, 트랜지션, 리워드의 영향을 받는다.
-
몇몇 상황에서 TD는 비가역적인 bias를 가질 수 있다.
-
partially observable한 상황에서, MC는 암묵적으로 모든 잠재변수를 계산한다.
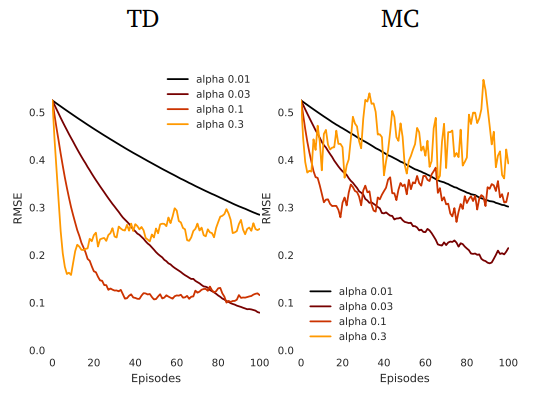
Example: Random Walk

이런 상황을 가정하자.
- transition은 왼쪽, 오른쪽 50%로 동일하고, Initial value는 v(s)=0.5,∀s라고 하자.
- 이때 실제 value는 다음과 같이 나타날 것이다.
v(A)=61,v(B)=62,v(C)=63,v(D)=64,v(E)=65
이때 TD와 MC에서의 평균 제곱근 오차 (RMSE)는 다음과 같이 나타난다.
Batch MC and TD
MC와 TD는 experience→∞, αt→0이라면 vt→vπ로 수렴한다.
그러나 만약 경험이 유한하다면 어떨까?
다음과 같이 경험의 fixed batch를 생각해보자.
episode 1: S11,A11,R21,⋯,ST11⋮episode K: S1K,A1K,R2K,⋯,STKK
이때 우리는 k∈[1,K] 에피소드에서 반복적으로 표본을 추출하여 MC나 TD(0)에 적용할 수 있다. = 경험적 모델에 의한 표본 추출
Differences in batch solutions
MC vs TD
- TD는 Markov property를 이용한다.
- 이는 fully-observable 환경에서 유용하다.
- MC는 Markov property를 이용하지 않는다.
- 이는 partially-observable 환경에서 유용하다.
- 유한한 데이터 또는 함수 근사를 하게 되면 solution은 달라질 수 있다.
Between MC and TD: Multi-Step TD
Unified View of RL
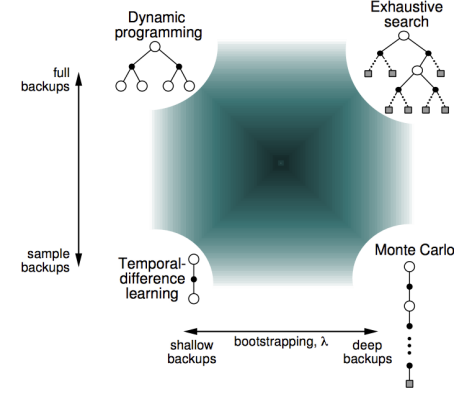
Multi-Step Updates
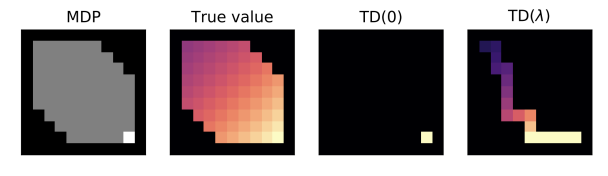
- TD는 정확하지 않을 수 있는 value estimate를 사용한다.
- 추가로 정보가 전파되는 속도가 꽤 느리다.
- MC는 전파가 빠르지만, update에 더 noise가 많다.
- 따라서 우리는 TD와 MC 그 중간을 찾고자 한다.
Multi-Step Prediction
TD target이 미래의 n 스텝을 본다고 해보자.
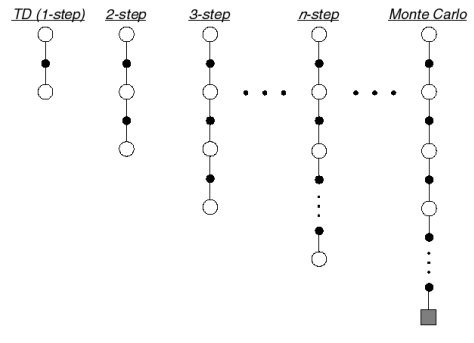
Multi-Step Returns
각 n-step의 리턴을 n=1,2,⋯,∞에 대해 생각해보자.
n=1n=2⋮n=∞(TD)(MC)Gt(1)=Rt+1+γv(St+1)Gt(2)=Rt+1+γRt+2+γ2v(St+2)⋮Gt(∞)=Rt+1+γRt+1+⋯+γT−t−1RT
이때 일반적으로 n-step은 다음과 같이 정의된다.
Gt(∞)=Rt+1+γRt+1+⋯+γn−1Rt+n+γnv(St+n)
그리고 Multi-step temporal-difference learning은 다음과 같이 진행한다.
v(St)←v(St)+α(Gt(n)−v(St))
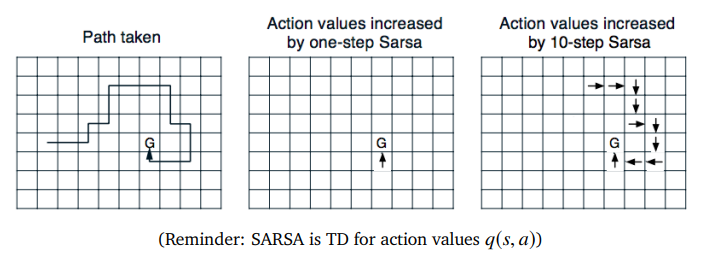
Grid Example
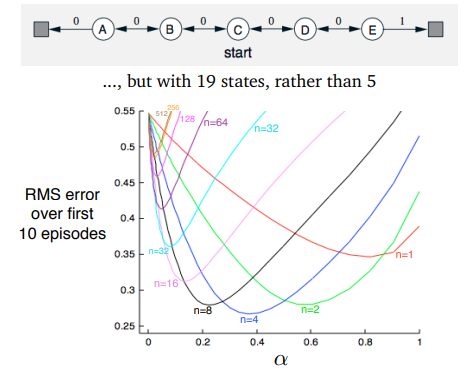
Large Random Walk Example
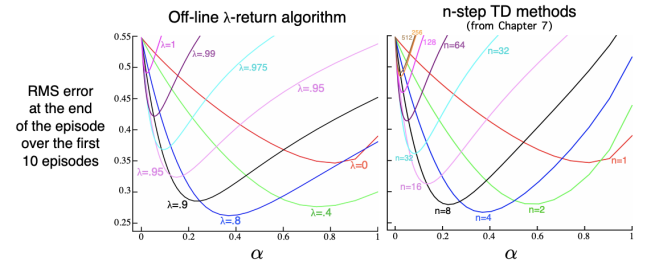
Mixed Multi-Step Returns
여러 state에 대하여 약간의 bootstrap을 수행할 수도 있다.
Gtλ=Rt+1+γ((1−λ)v(St+1)+λGt+1λ)
이 방식은 n-step return에 대하여 가중치 평균을 제공한다.
Gtλ=n=1∑∞(1−λ)λn−1Gt(n)
그리고 이는 이렇게 변형할 수 있다.
Gtλ=Rt+1+γ((1−λ)v(St+1)+λGt+1λ)
λ가 0인경우 TD, λ가 1인 경유 MC가 되는 것을 알 수 있다.
Benefits of Multi-Step Learning
- Multi-step은 TD와 MC 의 이점을 동시에 가져갈 수 있다.
- Bootstrapping은 bias와 관련한 문제가 있을 수 있고,
- Monte Carlo는 variance와 관련한 문제가 있을 수 있다.
- 전형적으로 n이나 λ는 중간정도 값을 골랐을 때 좋다.
Eligibility Traces
Independence of temporal span
MC와 multi-step은 예측하는 시간에 독립적이지 못하다. 긴 episode에서 value를 업데이트하기 위해서는 기다려야만 한다.
반면 TD는 즉시 업데이트할 수 있고, 예측 시간으로부터 독립적이다.
어떻게하면 두 마리 토끼를 다 잡을 수 있을까?
Eligibility traces
다시 linear function approximation을 가져와보자.
vw(s)=wTx(s)에 대한 Monte Carlo와 TD 업데이트는 다음과 같다.
Δwt=α(Gt−v(St))xt(MC)Δwt=α(Rt+1+γv(St+1)−v(St))xt(TD)
episode k에서 MC는 모든 상태들을 한번에 업데이트한다.
Δwk+1=t=0∑T−1α(Gt−v(St))xt
모든 업데이트를 누적하면 다음과 같다:
Δwt≡αδtetwhereet=γλet−1+xt
여기서 우리는 다음의 직관을 얻을 수 있다: 현재 TD error에 대한 과거 상태의 자격을 축소하고, 더해준다.
이건 꽤나 신기한데, 우리는 이제 모든 과거 상태들을 한번의 업데이트만으로 업데이트할 수 있다. 더이상 각각을 다시 계산할 필요가 없다.
이 아이디어는 function approximation으로 확장된다.
우리는 MC error를 TD error들의 합으로 다시 쓸 수 있다.
Gt−v(St)=Rt+1+γGt+1−v(St)==δtRt+1+γv(St+1)−v(St)+γ(Gt+1−v(St+1))=δt+γ(Gt+1−v(St+1))=⋯=δt+γδt+1+γ2(Gt+2−v(St+2))=⋯=k=t∑Tγk−tδk
이제 전체 에피소드에 대한 누적을 고려하면 다음과 같아진다.
Δwk=t=0∑T−1α(Gt−v(St))xt=t=0∑T−1α(k=t∑Tγk−tδk)xt=k=0∑T−1αt=0∑kγk−tδkxt=k=0∑T−1αδk≡ekt=0∑kγk−txt=k=0∑T−1αδkek=t=0∑T−1αδtet
여기서
et=γet−1+xt
가 되는데, 이 et를 eligibility trace라고 부르며, 각 스텝마다 이는 γ에 따라 작아지고, 현재 feature xt가 더해진다.
Intuition: 같은 TD error가 여러 MC error들에서 나타나므로, 이를 grouping하면 모든 과거 상태들을 한번의 업데이트만에 적용할 수 있다.
Mixed Multi-Step Returns and Eligibility Traces
다시 mixed multi-step return을 가져와보자.
Gtλ=Rt+1+γ((1−λ)v(St+1)+λGt+1λ)
여기서 연관된 에러와 trace update는
Gtλ=k=0∑T−tλkγkδt+k
이며, 여기서
et=γλet−1+xtandΔw+t=αδtet
가 된다.
이를 decay γλ인 accumulating trace라고 부른다.
이는 batched episodic update(offline)에 대한 것이고, online updating에 대해서도 비슷한 trace가 존재한다.