📦 RT-MOT: Confidence-Aware Real-Time Scheduling Framework for Multi-Object Tracking Tasks
RTCL

Introduction
R1. Guarantee of timely execution , R2. High tracking accuracy
No study has achieved both for multiple MOT tasks to be applied to a vision system with multiple cameras.
Key questions addressed
- How can we design the system architecture of RT-MOT to provide a control knob to explore a trade-off between R1 and R2?
- How can we efficiently utilize the proposed system architecture to achieve R1 and R2?
Contributions
- Motivate
the importance of choosing a proper pair of detection and association modelsto explore a trade-off between R1 and R2. - Propose the first system design
RT-MOT, which addresses R1 and R2 for multiple MOT tasks. - Re-define and estimate a measure, which enables to predict tracking accuracy variation to be used in the scheduling framework.
- Develop a novel
confidence-aware real-time scheduling frameworkfor RT-MOT, which offers both offline and online timing guarantees withflexible execution - Demonstrate the effectiveness of RT-MOT through experiment on an actual computing system.
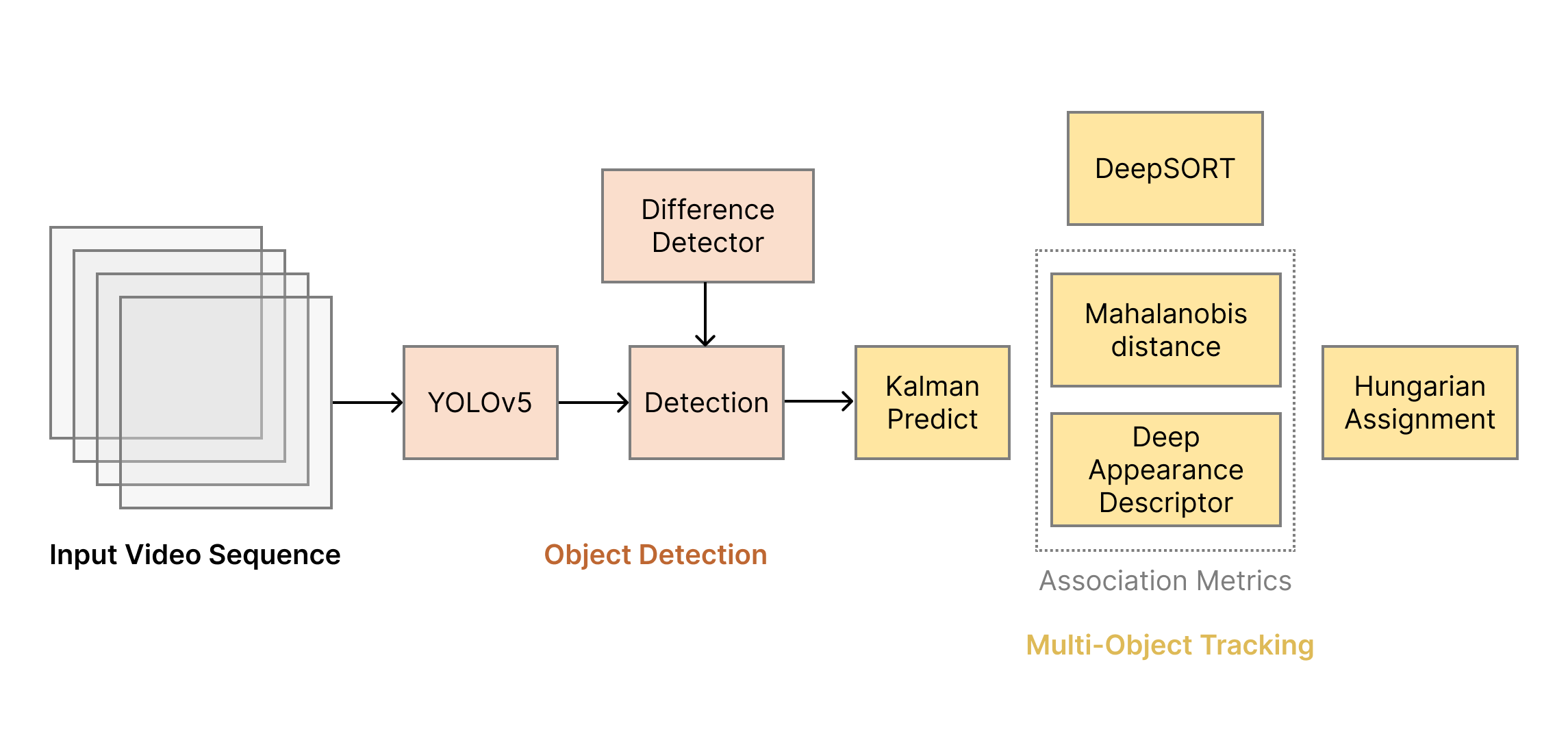
Target System: DNN-based Multi-Object Tracking
Trade-off between Execution Time and Tracking Accuracy
Experiment inputs
- High-confidence detection () : processing a full-size frame
- Low-confidence detection () : processing a partial portion of a frame
- High-confidence association () : performing both feature- and IoU-based methods
- Low-confidence association () : performing the IoU-based method only

Observations
- There exists a
trade-off between execution time and tracking accuracyin choosing the ratio of high-confidence detection/association. - Tracking accuracy
varies greatlywith different combinations of a choice of detection and association schemes,although the combinations yield similar computation time.
Challenges
- There exists
a huge number of possible combinations of the choicesof detection and association schemes for a frame sequence. - The tracking accuracy of one combination also dynamically varies with the input frame sequence.
- + Multiple tasks
System Goal and Overview
RT-MOT
- Supports dynamic selection of different execution models for detection and association.
- Run-time frame-level scheduling decisions
Key issues
- I1) How to
estimate the variation of overall accuracyaccording to different detector/tracker selections of the next frame? - I2) How to
provide an offline timing guaranteeto multiple MOT tasks while maximizing the overall accuracy at runtime using the answer of I1? - I3) How to
design the system architecturethat supports flexible tracking-by-detection andprovides an interfacethat can accommodate the answer of I1 and I2?
Design of RT-MOT
1. Dynamic tracking-by-detection execution pipeline
- High-confidence detector () : process a full-size frame (672 672)
- Low-confidence detection () : process a RoI of a frame (256 256)
- High-confidence association () : feature-based + IoU-based
- Low-confidence association () : IoU-based only

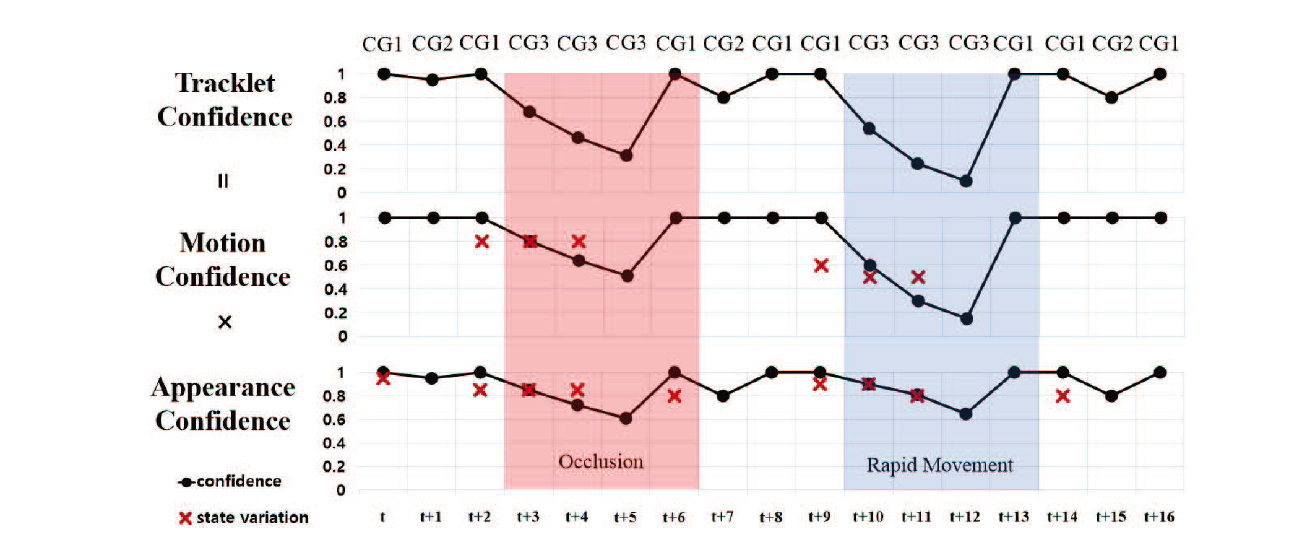
2. Multi-object tracking confidence estimator
- Tracklet confidence:
- Motion confidence(): specified as position, size, and velocity.
- Appearance confidence(): feature vector extracted by feature extractor.
3. Frame-level flexible scheduler
- The scheduler determines each frame’s priority and its pair of detector and tracker according to non-preemptive fixed-priority
with the minimum execution by default. - Considering the currently available running time, prioritize and select detection and association models that
provide higher accuracy.
Tracking confidence
Definition of Tracklet
Object,
- the -th object response detected at the -th frame
- : motion state, appearance state
Tracklet,
- a set of tracks followed by up to the -th frame
Tracklets set,
- A set of tracklets of all objects up to the -th frame.
Tracklet confidence definition
Tracklet confidence,
Motion confidence,
- specified as position, size, and velocity.
Appearance confidence,
- feature vector extracted by feature extractor.
Updating tracklet confidence
CG1. is matched with one of the detected objects by high-confidence association.
CG2. is matched with one of the detected objects by low-confidence association.
CG3. is unmatched with any of the detected objects.
Calculating variation of confidences
-
Motion confidence variation ()
where
-
Appearance confidence variation ()
Tracklet Confidence Prediction for next frame
Confidence Prediction Model
- (, ) : all tracklets belong to CG1.
- (, ) : a subset of tracklets in RoI belongs to CG1, and the rest of tracklets outside RoI belongs to CG3.
- (, ) : all tracklets belong to CG2.
- (, ) : a subset of tracklets in RoI belongs to CG2, and the rest of tracklets outside RoI belongs to CG3.
Expected Confidence Score Calculation
Measured Confidence Score Calculation
Confidence Improvement Calculation
Scheduling Framework for RT-MOT
Scheduling Framework, NPFP
-
First, NPFP shares the existing
offline schedulability testfor NPFP, which offerstimely executionof every instance (i.e. job) of a set of multi-object tracking tasks. -
Second, NPFP checks the feasibility for each active job to be executed
beyond its minimum execution requirement, without compromising the schedulability of any future jobs to executed according to NPFP. -
Third, NPFP chooses to execute the job that yields the
largest expected improvementof confidence score
Task Model
Periodic task model
- (detection + association)
Detection part
- : the WCET for RoI identification and image cropping.
- : the total inference time for YOLOv5 that has the two different WCETs for low-confidence () and high-confidence () detection.
Association part
- : the WCET for low-confidence (L) and high-confidence (H) association.
- : the WCET for a simple IoU-based matching algorithm.
- : the WCET for feature-based method.
- ,
- : the WCET for updating the confidence of all tracklets in each task.
Combinations
Base Scheduling Algorithm
NPFP
Same as the traditional non-preemptive fixed-priority scheduling with for every .
Lemma 1
Suppose that a task set is scheduled by the NPFP scheduling algorithm.
If every task satisfies , every job invoked by tasks in cannot miss its deadline.where , the worst-case response time of , is calculated by finding through iteration from in .
Novel Scheduling Framework for RT-MOT
NPFP
To guarantee the feasibility of a job, we need to guarantee
- No deadline miss of if it starts its execution for at .
- No deadline miss of all future jobs to be executed after according to NPFP.
If it's deemed feasible to execute for given ,
- we calculate
- set to T.
If flex is T, find the largest
otherwise, follow NPFP.
Online feasibility test
- : the existence of an active job of at .
- : the earliest release time of any job of after or at .
(if , then the deadline of a job of )
Lemma 2
Suppose that we start to execute a job of (denoted by ) at for at most .
Then, if holds, cannot miss its deadline.
Lemma 3
Suppose that
(i) We start to execute an active job of (denoted by ) at for at most
(ii) All jobs to be executed after ’s execution are scheduled by NPFPIf holds, the earliest job of a given with to be executed after ’s execution (denoted by ) cannot miss its deadline. (Note that can be .)
Lemma 4
Suppose that
(i) We start to execute an active job of (denoted by ) at for at most
(ii) All jobs to be executed after ’s execution are scheduled by NPFP
(iii) holds for every .If holds, the earliest job of a given with to be executed after ’s execution (denoted by ) cannot miss its deadline. (Note that cannot be .)
Lemma 5
Suppose that
(i) a job of (denoted by ) starts its execution at and does not miss its deadline if it executes for up to ,
(ii) all jobs to be executed after ’s execution are scheduled by NPFP, and
(iii) holds for every .Then, any job of to be executed after ’s execution cannot miss its deadline.
Theorem 1
Suppose that a task set is scheduled by NPFP in Algorithm 1.
If every task satisfies , every job invoked by tasks in cannot miss its deadline.
Experimental Setup
Hardware and Software
- Intel(R) Xeon(R) Silver 4215R CPU @ 3.20GHz, 251.5GB RAM, NVIDIA V100 GPU.
- Ubuntu 18.04.4 with CUDA 10.2, and PyTorch 1.10.2
- YOLOv5 as a front-end detector.
- Waymo Open dataset.
- DeepSORT, SORT for association.
Experimental Setup
Execution time profiling and run-time overhead
| 0.6 | 12.6 | 13.1 | 3.2 | 23.4 | 0.7 | |
| 0.9 | 17.6 | 23.2 | 9.6 | 32.7 | 0.9 |
- : the WCET for RoI identification and image cropping.
- : the total inference time for YOLOv5 that has the two different WCETs for low-confidence () and high-confidence () detection.
- : the WCET for low-confidence (L) and high-confidence (H) association.
- ,
- : the WCET for updating the confidence of all tracklets in each task.
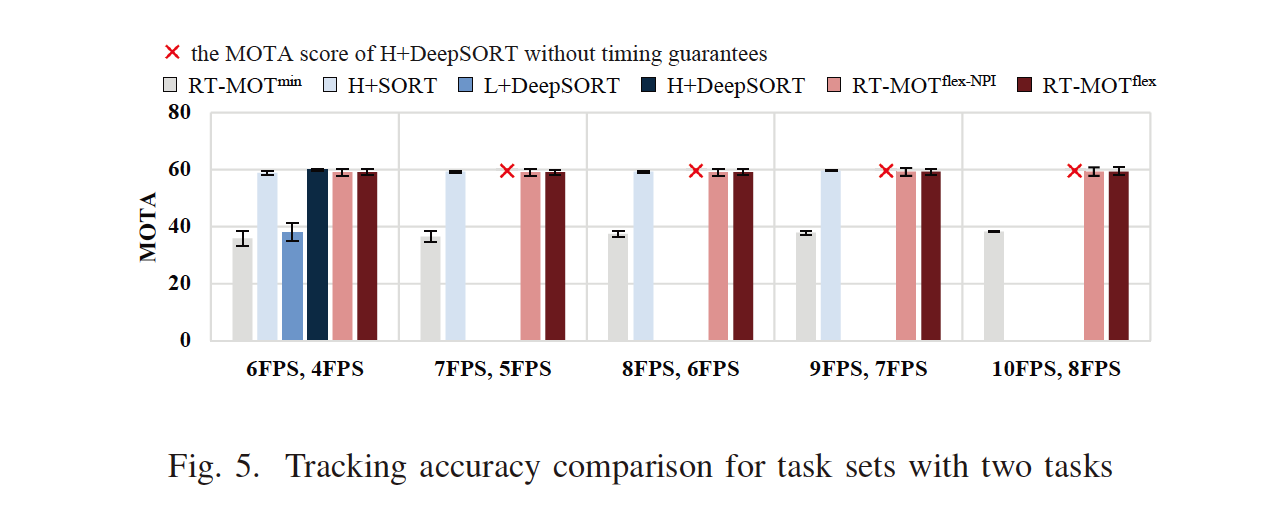
Experimental Results
MOTA
- : the number of all objects for time
- : the number of missed for time
- : the number of false positive for time
- : the number of mismatches for time
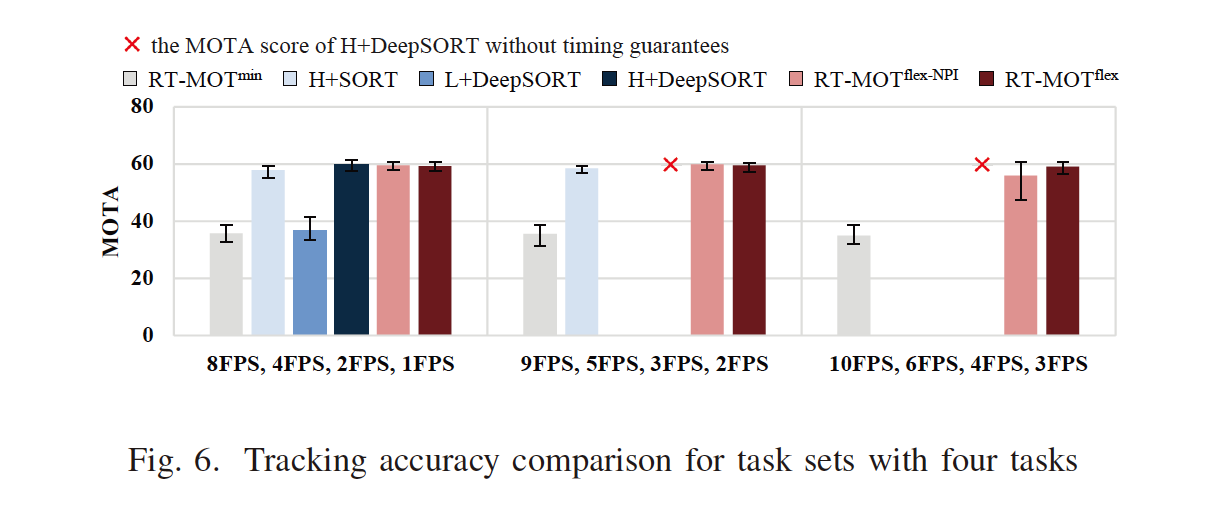
Three versions
- RT-MOT employs NPFP.
- RT-MOT employs NPFP but does not allow priority inversion.
- RT-MOT employs NPFP$^\textrm{flex} $ in Algorithm 1 as it is.
Fixed-Priority policy
- Rate-monotonic
Popular RT-MOT versions
H+SORTemploysYOLOv5 with the original framesize (672×672) for detection and SORT for association.L+DeepSORTemploysYOLOv5 with the down-scaled framesize (256×256) for detection and DeepSORT for association.H+DeepSORTemploysYOLOv5 with the original framesize (672×672) for detection and DeepSORT for association.
Related work
| Subject | Related works |
|---|---|
| One-Stage MOT | FairMOT, ByteTrack |
| Two-Stage MOT | DeepSORT, StrongSORT |
| RT Detection | DNN-SAM, AnytimeNet |
| RT Scheduling | SubFlow, Real-Time Multi-Path |
| Single MOT Task | Self-cueing Attention |
Conclusion
RT-MOT
- a method to
estimate the overall accuracy variationaccording to different detector/tracker selections - a scheduling framework that provides
offline timing guaranteeswhilemaximizing overall accuracyat run-time using the method - a
system architecturethat supports the framework.
Future Works
- More combinations of various detectors and trackers
- Improve the scheduling framework in terms of schedulability performance.
(e.g., by allowing a preemption between the completion of detection and the beginning of association for each MOT task.)