이번에는 near-field diffraction(근거리 회절)애 대해 다루고자 한다.
이는 단색(monochromatic) 파동에 대한 paraixal approximation(축 근사)를 사용하는 Fresnel 회절 적분에 의해 결정된다.
U(x2,y2)=jλ△zejk△zej2△zk(x22+y22) −∞∫∞−∞∫∞ U(x1,y1)× ej2△zk(x12+y12)e−jλ△z2π(x2x1+y2y1)dx1dy1
Fraunhofer 근사인 △z>λ2D2를 적용하면 위 식에서 quadratic phase exponential(2차 phase 항)이 제거된다. 결과적으로 Faunhofer 회절 적분이 된다.
하지만 근거리 회절의 경우에는 위 근사가 적용되지 않는다.
완벽한 구형(근축 근사에서) 및 얇은 렌즈에 의해 생기는 위상 지연 다음과 같이 주어진다.
- x,y: exit-pupil(빛이 렌즈를 통과한 후 모이는 평면)렌즈 평면에서 좌표
- fl은 초점거리다.
ϕ(x,y)=2flk(x2+y2)
투명한 평면 물체가 3가지 중 한 위치에 놓일 수 있다.
1. 렌즈에 닿은 상태(앞에)
2. 렌즈 앞에
3. 렌즈 뒤에
이 물체는 수직 입사하고 무한한 범위와 균일한 진폭을 갖는 plane wave에 의해 조명된다.
물체를 통과하는 빛을 렌즈의 후초점 평면으로 전파하는데 U(x2,y2) 식을 사용할 수 있다.
결과적으로 phase term(ϕ(x,y))는 Fresnel 회절 적분 안에서 U(x1,y1)의 부분이 된다. 이는 더 간단화할 수 있다.
1. 물체가 렌즈 앞에 닿은 상태
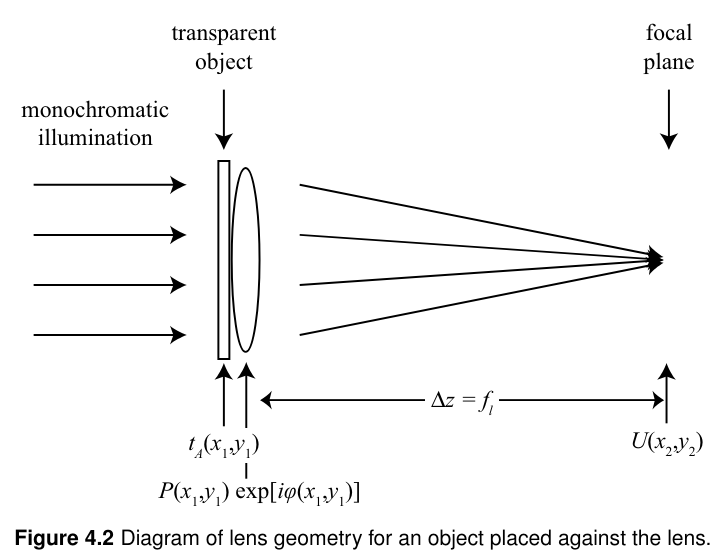
렌즈 바로 뒤 plane에서 optical field를 다음과 같이 정의할 수 있다.
- tA(x1,y1): 물체의 통과하는 빛의 비율(aperture transmittance)
- P(x1,y1): lens에 의한 apodization을 설명하는 실수 함수
- 광학 시스템의 입력 강도 프로파일을 의도적으로 변경하는 데 사용
- transmission profile that approaches zero at the edges.)
U(x1,y1)=tA(x1,y1) P(x1,y1)e−j2flk(x12+y12)
focal plane에서니깐 △z=fl
U(x1,y1)을 Fresnel 회절 적분에 대입하면,
U(x2,y2)=jλ flejk flej2 flk(x22+y22) −∞∫∞−∞∫∞ tA(x1,y1)× P(x1,y1) ej2flk(x12+y12)e−j2fl2π(x12+y12) e−jλfl2π(x2x1+y2y1)dx1dy1
=jλ flejk flej2 flk(x22+y22) −∞∫∞−∞∫∞ tA(x1,y1)× P(x1,y1) e−jλfl2π(x2x1+y2y1)dx1dy1
위 식을 Fourier Transform의 형태로 변환하면
U(x2,y2)=jλ flejk flej2 flk(x22+y22) F{tA(x1,y1)P(x1,y1)}∣fx=λflx2,fy=λfly2
수렴 렌즈에 닿게 놓인 물체의 경우, 물체 평면에서 초점 평면으로의 전이를 아래 lens_against_ft 함수로 제공
2. 물체가 렌즈 전에 있는 경우
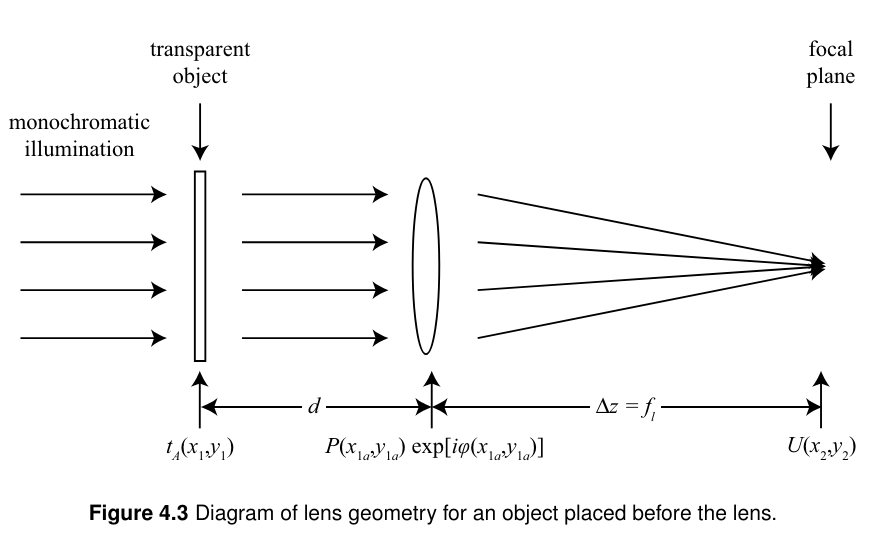
렌즈 뒤 d만큼 떨어진 위치에 놓인 일반적인 상황에서 빛이 초점 평면으로 전파하면,
렌즈 aperture에 의해 물체의 vignetting(비네팅)을 고려하기 위해 조리개 pupil 함수인 P(∙)의 인자가 shift된다.
- Vignetting: 광학 시스템에서 빛이 모이는 곳에 도달하는 데 필요한 경로가 차단되어 광학 성능이 저하되는 현상
focal plane에서 각 점은 광축 상의 점에서 가장 작은 vignetting을 경험한다.
U(x2,y2)=jλ flejk flej2 flk(1−fld)(x22+y22) −∞∫∞−∞∫∞ tA(x1,y1)× P(x1+fldx2, y1+fldy2) e−jλfl2π(x2x1+y2y1)dx1dy1
결국 FT로 표현하면,
U(x2,y2)=jλ flejk flej2 flk(1−fld)(x22+y22) ×F{tA(x1,y1)P(x1+fldx2, y1+ㄴdfly2)}∣fx=λflx2,fy=λfly2
여기서 흥미로운 case가 있는데, 물체를 lens에 바로 닿는 d=0이면 #1 경우와 같은 해가 된다.
두번째는 d=f1 에 물체가 focal plane에 놓이는 경우,
밖의 phase factor가 1이 된다. 정확하게 푸리에 변환만 가지고 관계식이 된다.
3. 물체가 렌즈 후에 있는 경우
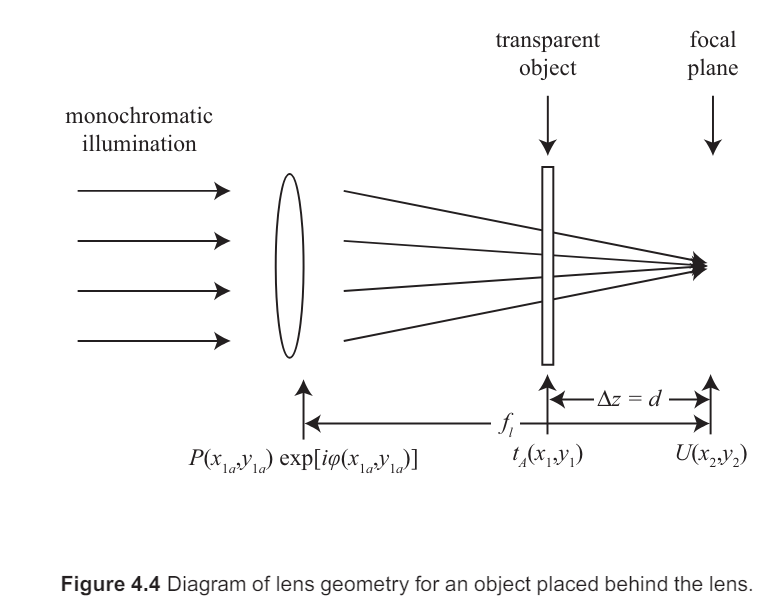
위 그림과 같이 focal plane으로부터 d만큼 lens 후에 물체가 있는 경우 optical field Us(x1,y1)은 물체 바로 전에서 수렴하는 구면파로 다음과 같이 주어진다.
