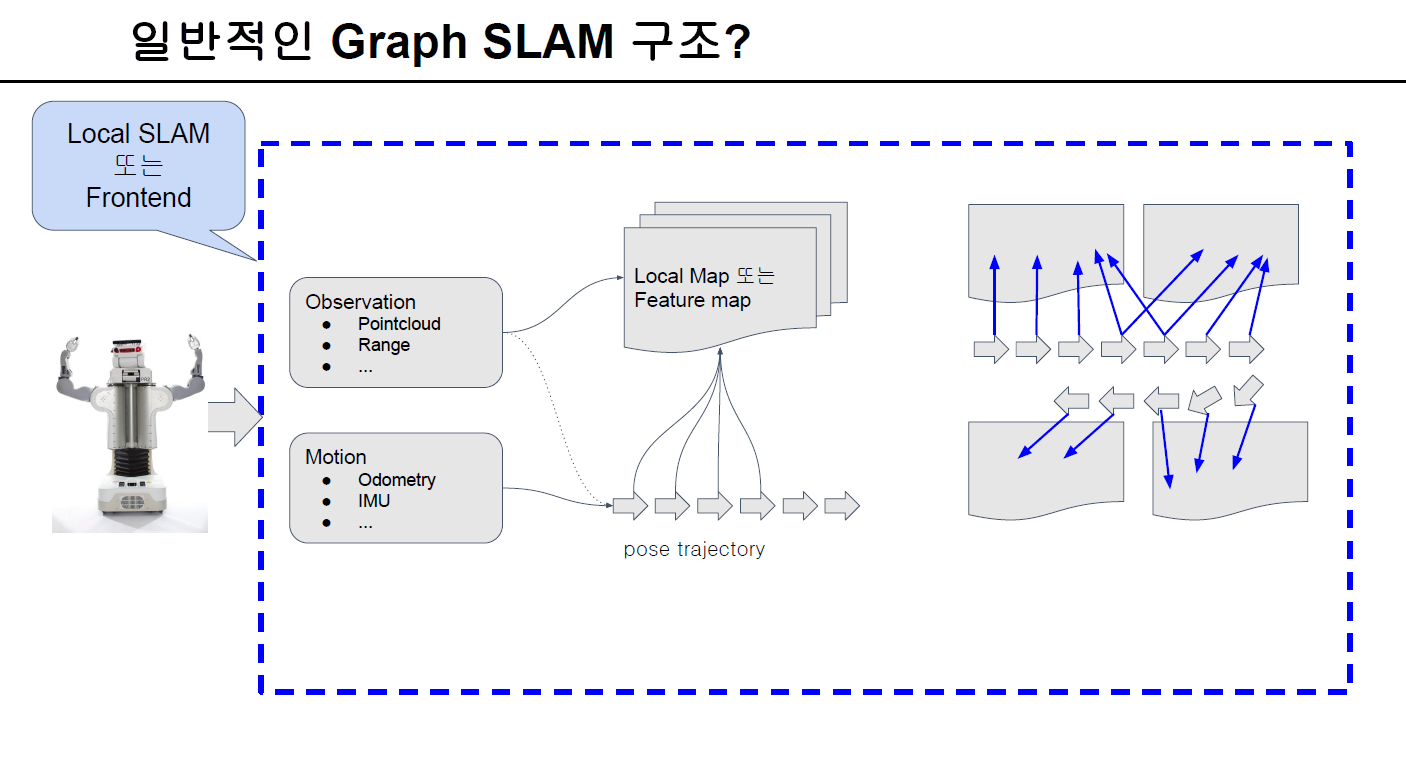
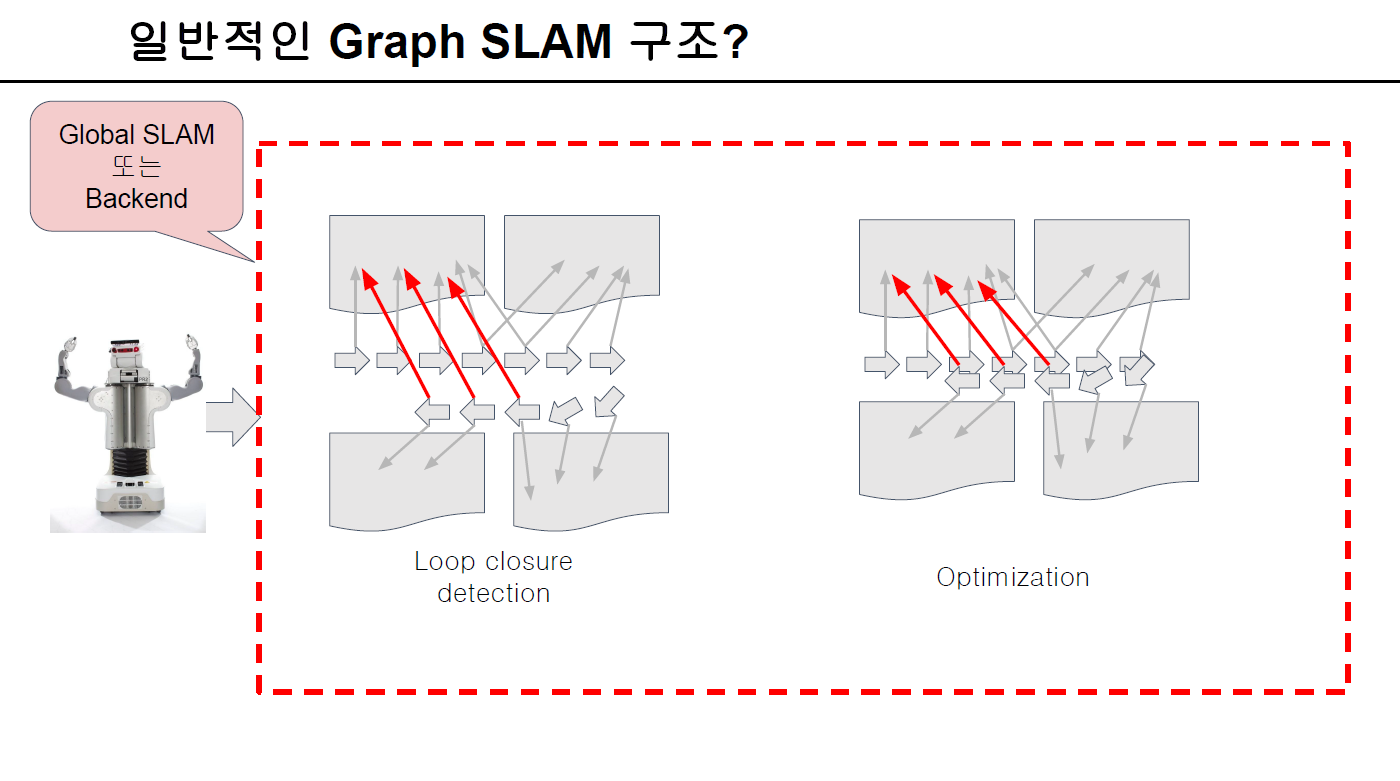
Graph SLAM 구조
- Loop Closure Detection - Revisit
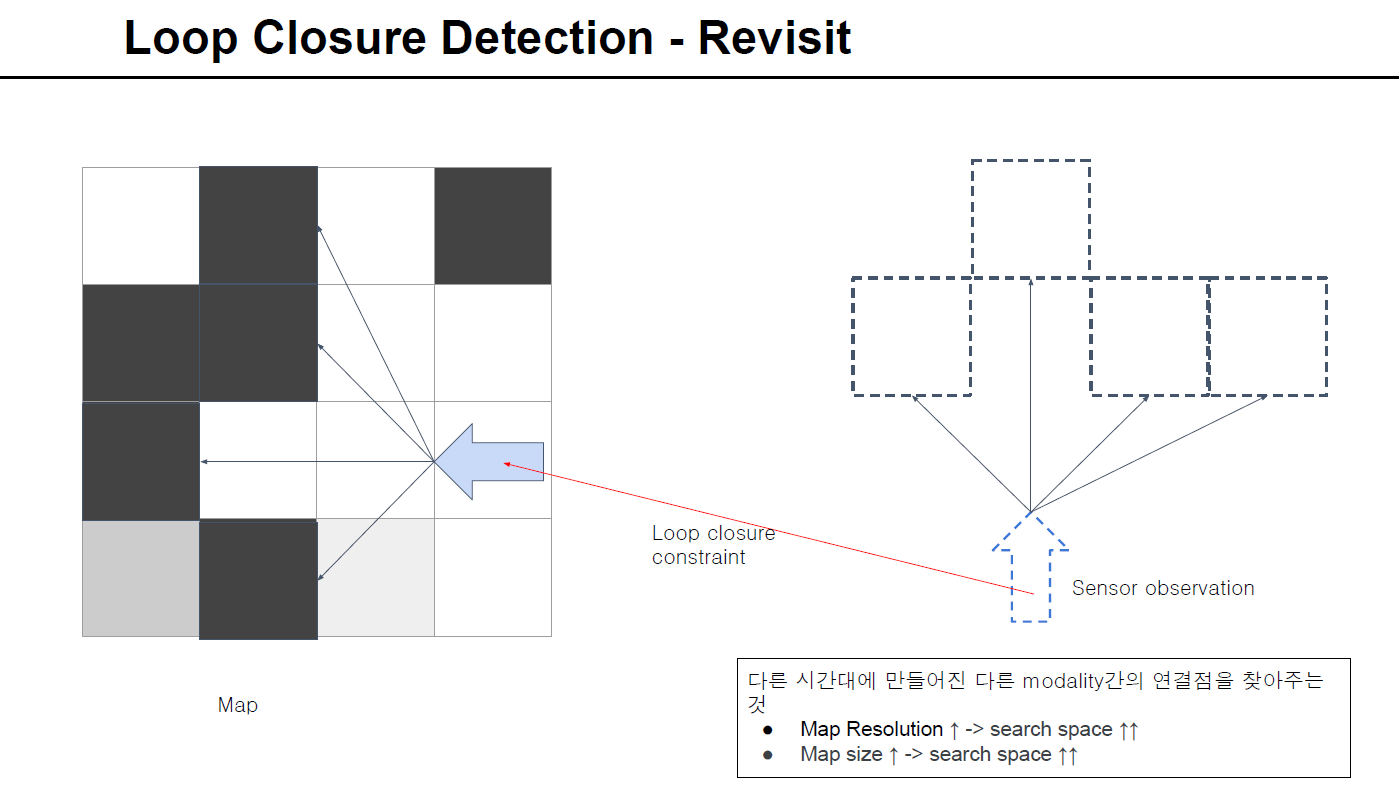
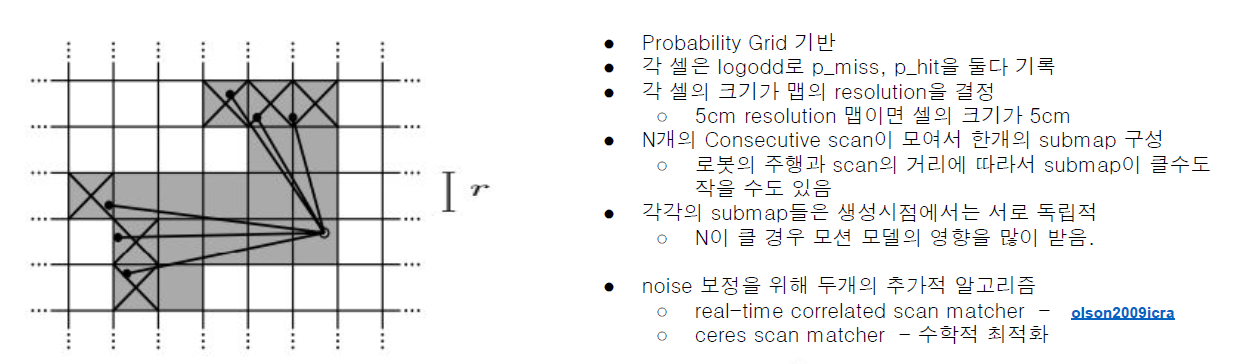
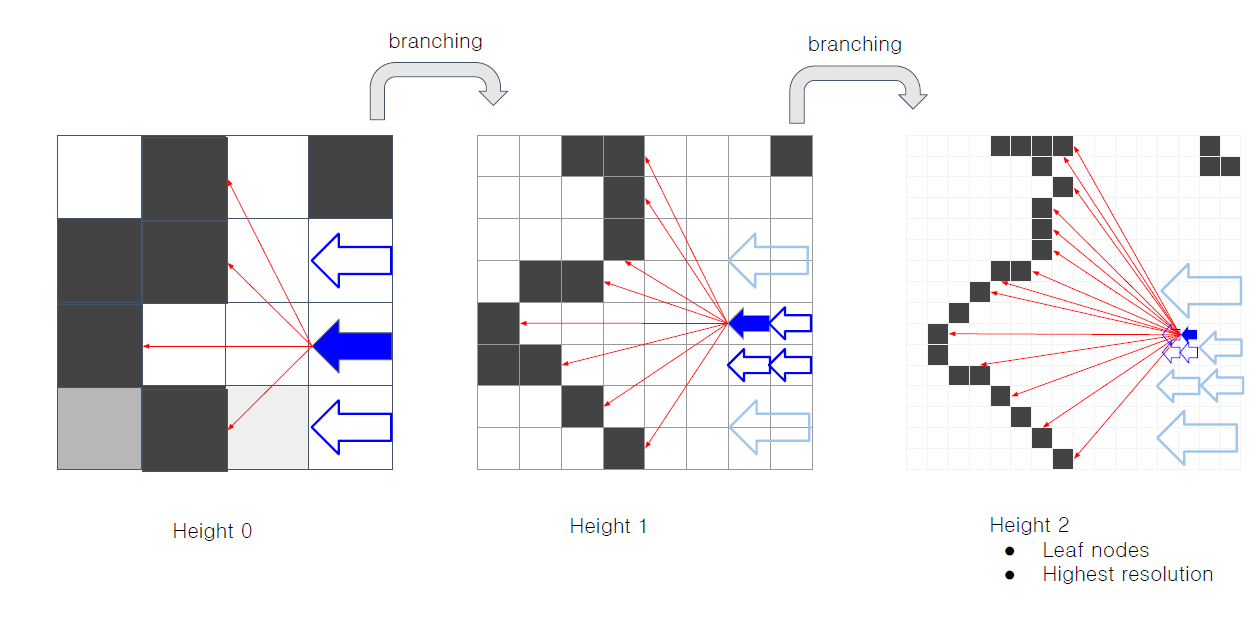
- 2D LiDAR SLAM은 5cm 수준의 고화질의 Map에서 Global(Loop closure) Constraint를 실시간 수준으로 계산할 수 있는 Branch-and-bound 방식을 제안함.
- Branch-and-Bound (DFS 기반) :
Cartographer
-
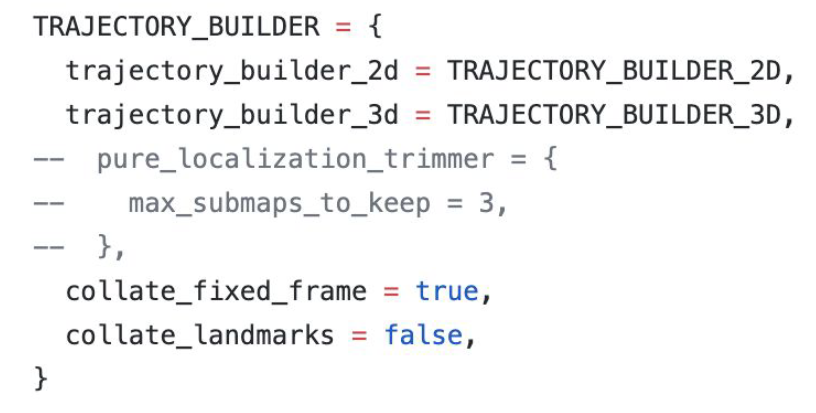
Localization
- Frozen Pose graph(Map)와 현재 로봇이 만들고있는 Pose graph간의 inter trajectory constraint(또는 global constraint)를 지속적으로
찾아주는 방식 - 현재 생성되는 pose trajectory의 길이를 windowing 방식으로 제한을 두어 실시간 최적화가 가능
- Frozen Pose graph(Map)와 현재 로봇이 만들고있는 Pose graph간의 inter trajectory constraint(또는 global constraint)를 지속적으로
-
Cloud based Mapping
cloud에서 map을 로봇에게 지속적으로 업데이트 해줌.
한정된 맵만 유지하고, 오버랩되는 submap은 지워줌. pose trajectory에 비례하는 것이 아니라 공간의 크기에 비례함 -
TSDF (Truncated Signed Distance Function) support
확률 그리드를 표현하는 방식의 일종
주로 3D volume reconstruction 할 때 사용
일반적인 확률 그리드 방식보다는 느리지만 더 정밀함 -
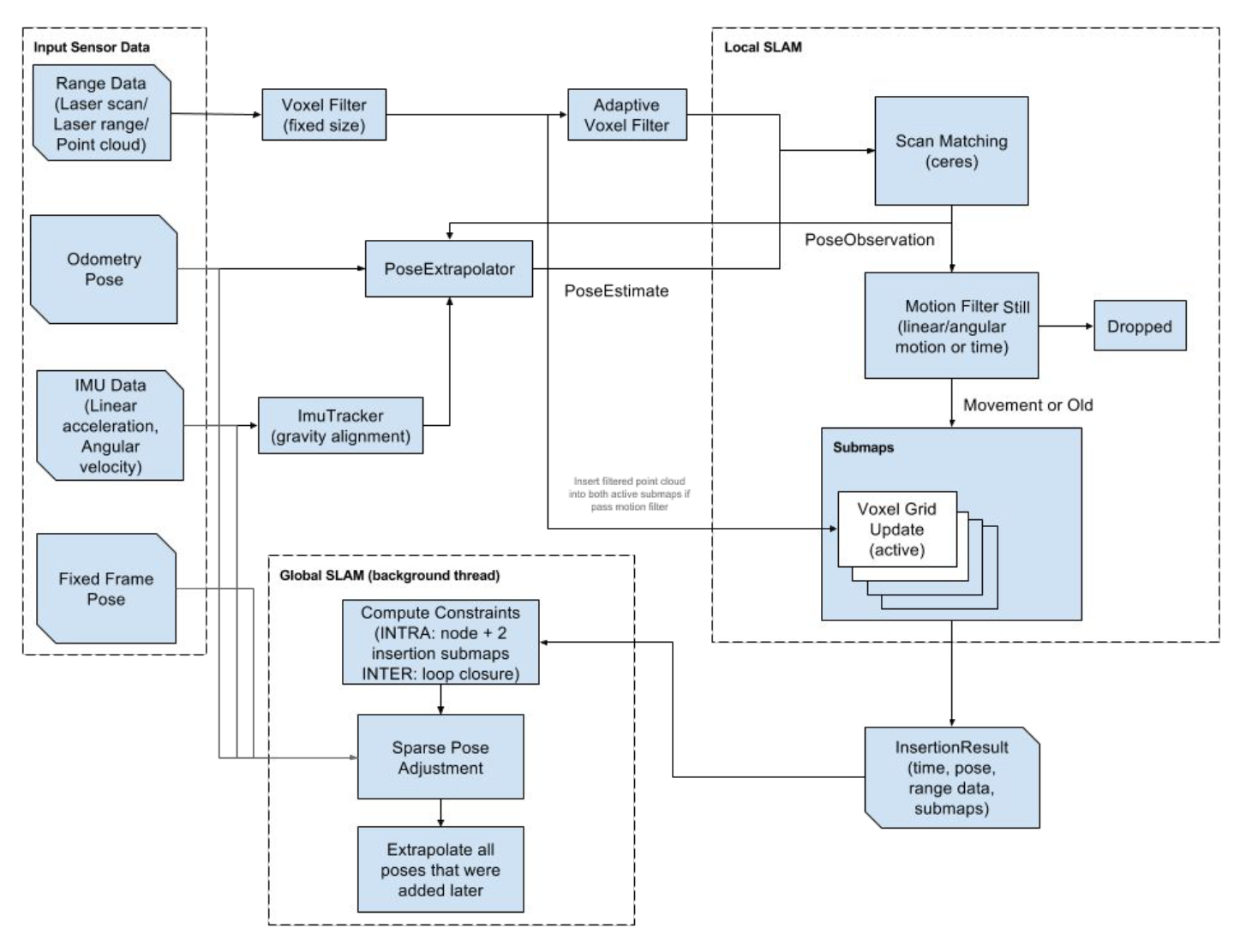
cartographer 구조도
offline / online
Offline SLAM
센서 데이터를 모두 얻은 다음에 맵을 만드는 것 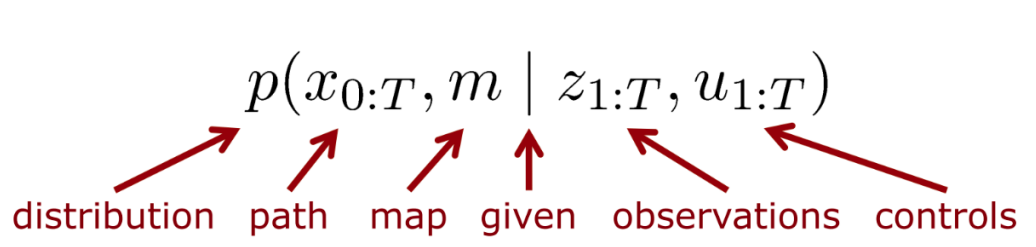
- 와 를 고려해서 와 을 확률적으로 표현함
Onlnie SLAM
실시간으로 맵도 만들고, 자신의 위치도 파악하는 SLAM 시스템
- 와 만을 이용해서 Map과 Path를 생성
- Online 식을 적분하면 Offline SLAM
