[Photogrammetry] 12-1 Camera Parameters - Extrinsics and Intrinsics
Photogrammetry (Cyrill Stachniss)
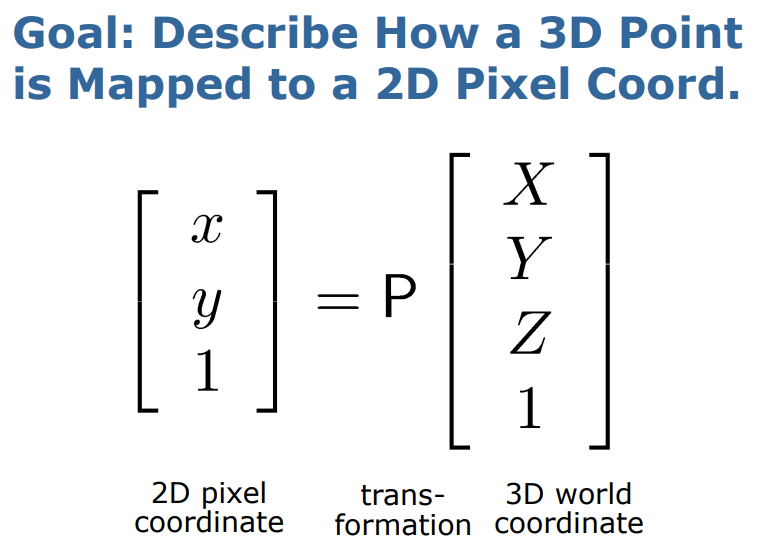
Goal: Mapped to a Pixel Coordinate
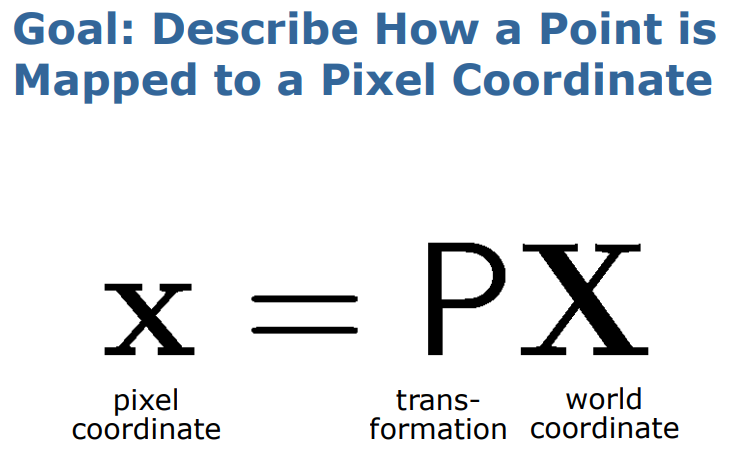 world coordinate는 3d, pixel coordinate는 2d
world coordinate는 3d, pixel coordinate는 2d
어떻게 3d->2d로 변환할지 알아보기
Coordinate Systems 종류
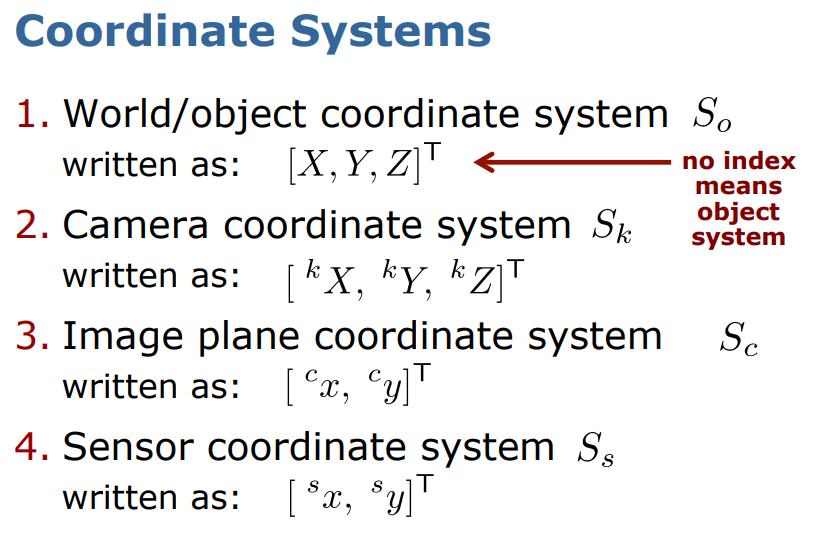 좌측 위에 있는 index에 따라서 이게 어떤 좌표계(coordinate system)인지 알 수 있다.
좌측 위에 있는 index에 따라서 이게 어떤 좌표계(coordinate system)인지 알 수 있다.
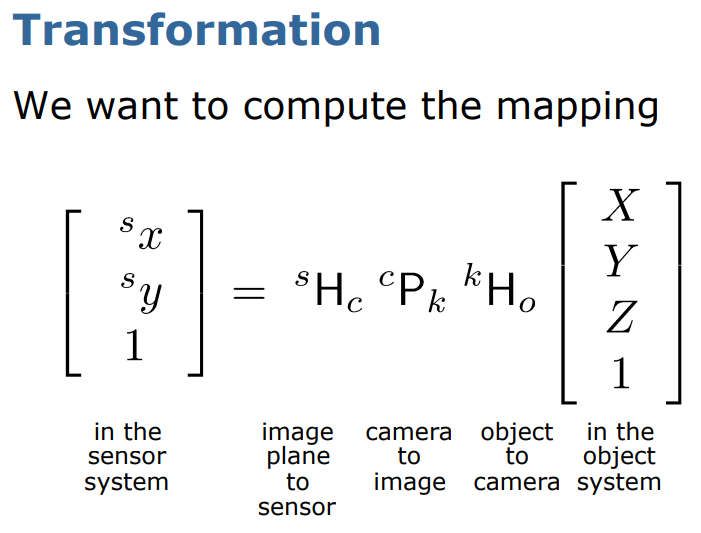 index를 읽을 때,
index를 읽을 때,
from 오른쪽아래 index로부터 왼쪽위 index로!
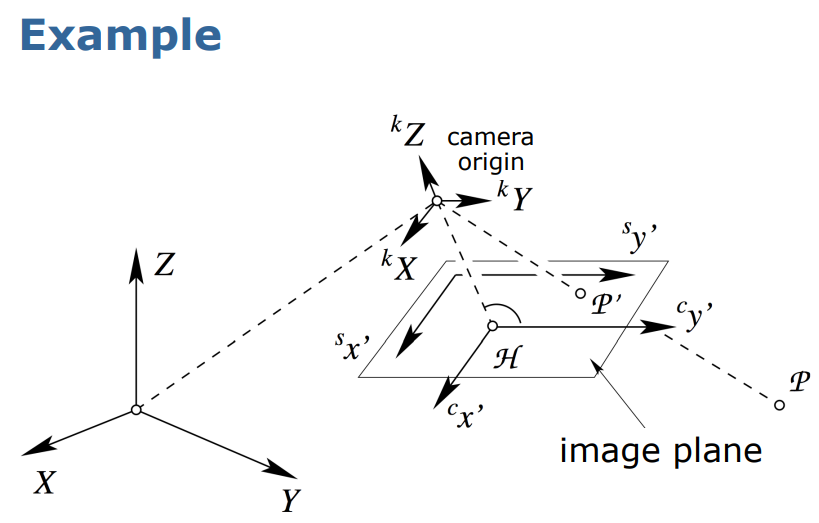
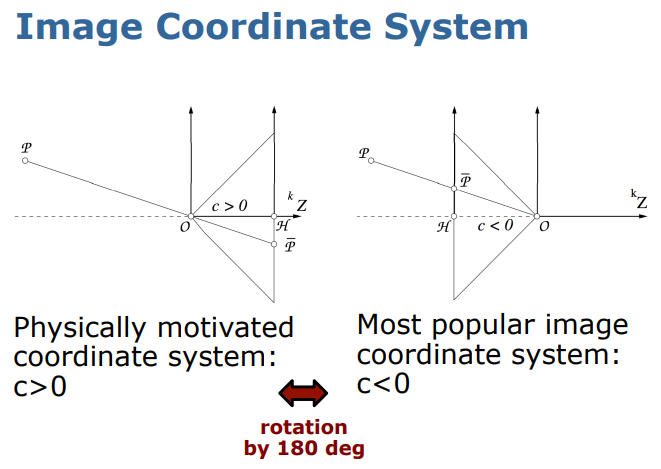
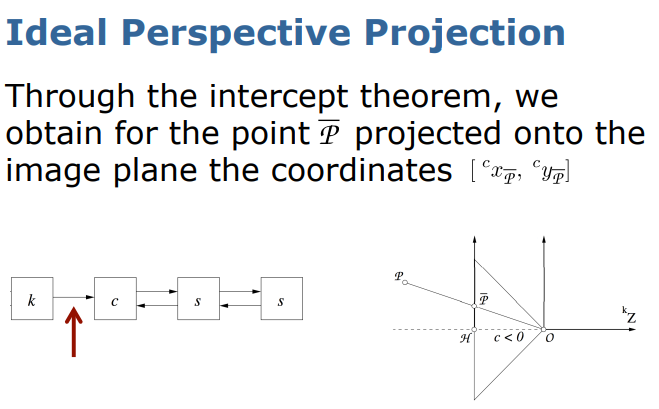
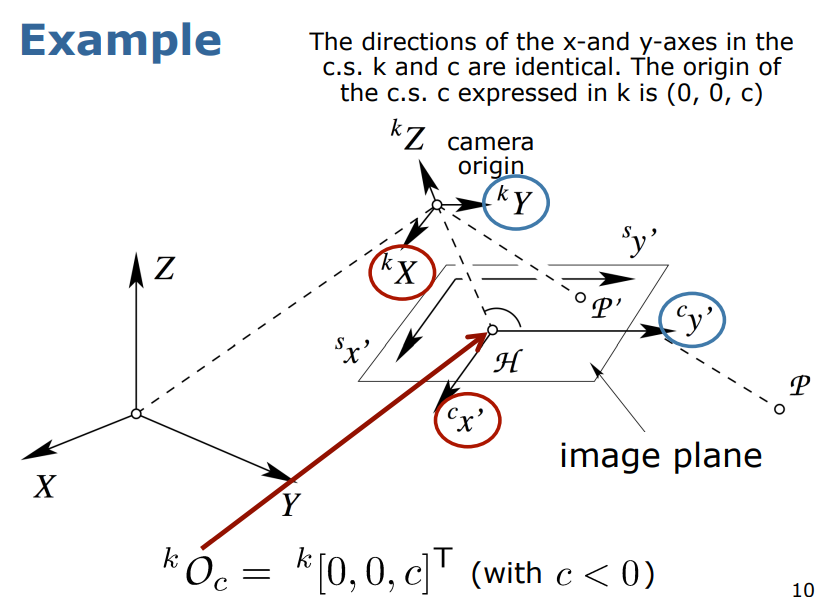 image plane은 camera coordinate system(k)로부터 camera constant만큼 떨어져 있음
image plane은 camera coordinate system(k)로부터 camera constant만큼 떨어져 있음
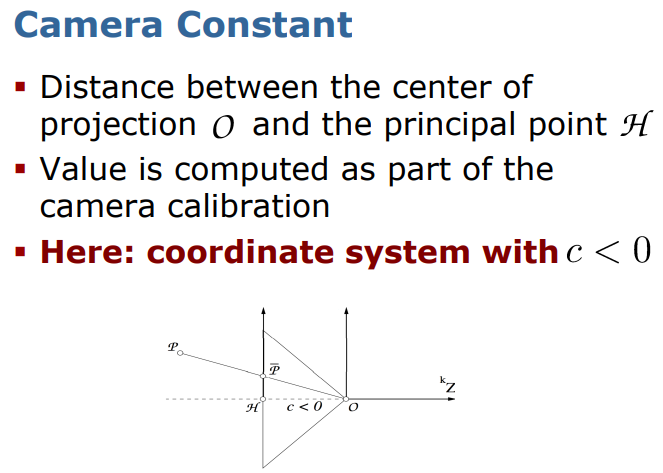
즉, camera constant는 image plane이 나의 카메라의 prediction center로부터 얼만큼 떨어져 있는지 알려줌
그리고 image plane 다음으로는 sensor가 있음
image plane -> camera는 Z축으로 shift한 것
World->Sensor로 가는 과정
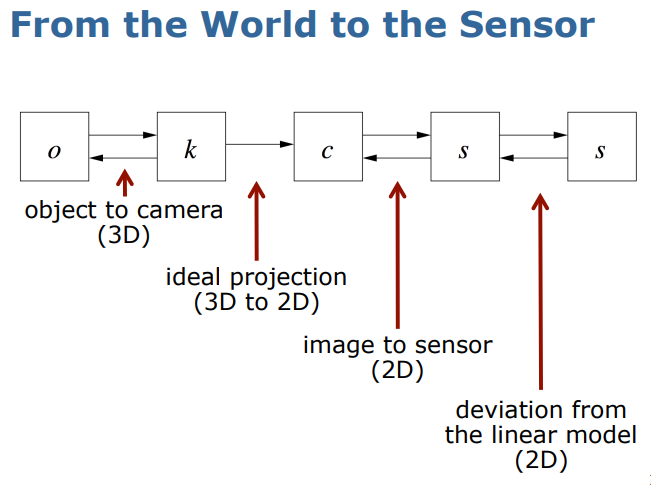 ideal projection(3D->2D)에서는 몇몇 정보들을 잃고 있다는 것을 의미
ideal projection(3D->2D)에서는 몇몇 정보들을 잃고 있다는 것을 의미
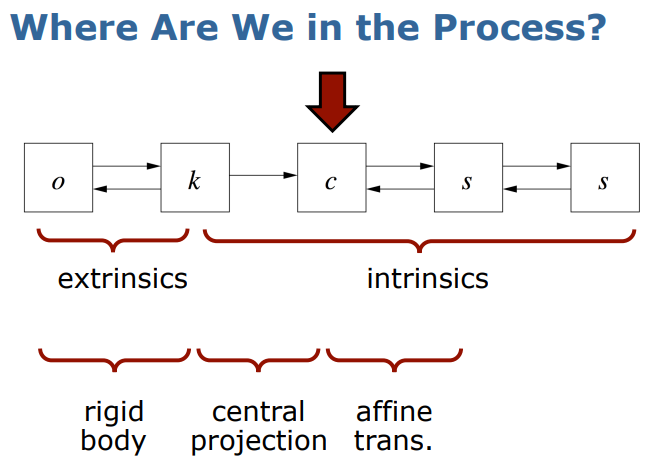
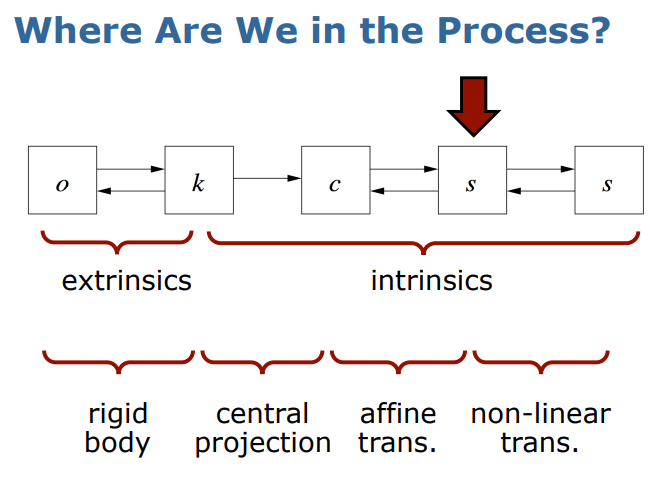
Extrinsic & Intrinsic
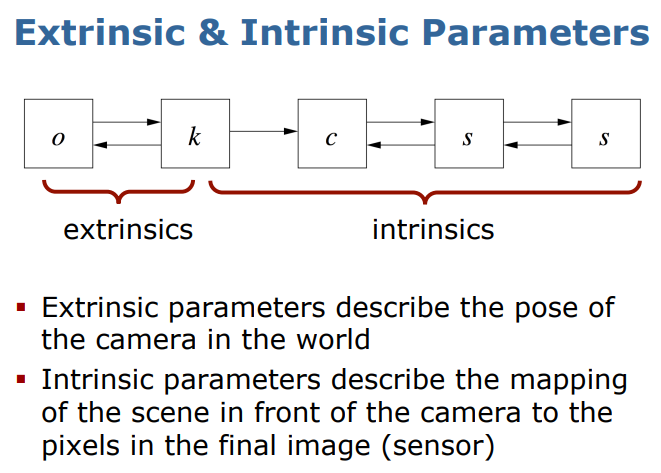
extrinsic parameter: outside the camera
ex) 카메라 이동, 회전intrinsic parameter: inside the camera
ex) sensor가 prediction center로 부터 얼마나 솟아있는지
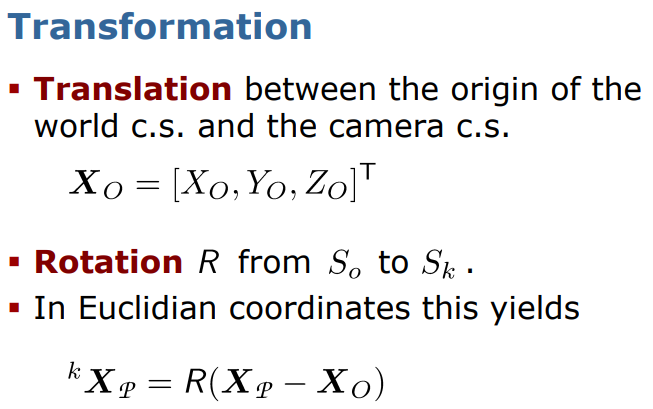
Extrinsic Parameters
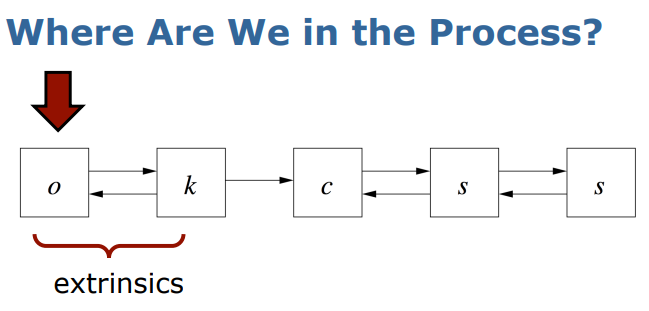 이 과정에서 사용되는 것이 바로 extrinsic parameter
이 과정에서 사용되는 것이 바로 extrinsic parameter
world/object 좌표계 => camera 좌표계
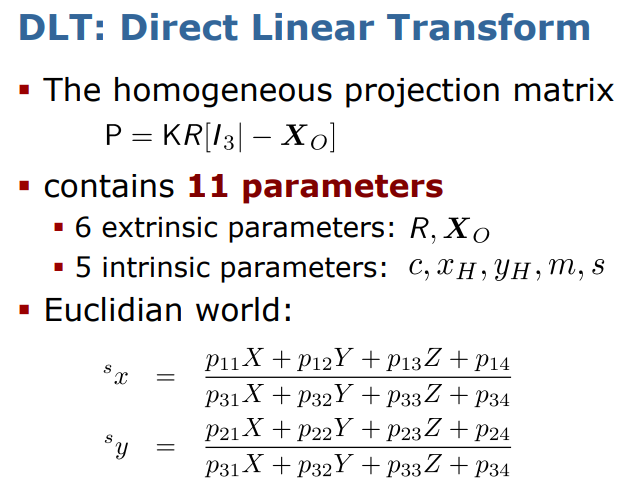
 총 6개의 parameter가 필요함
총 6개의 parameter가 필요함
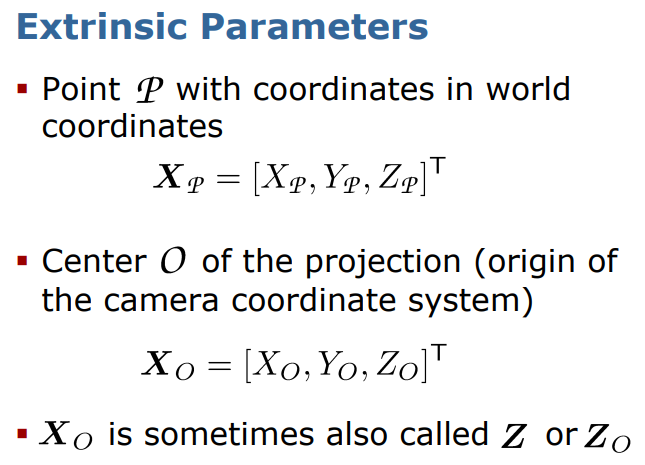 Point P와 Center O
Point P와 Center O
Translation & Rotation
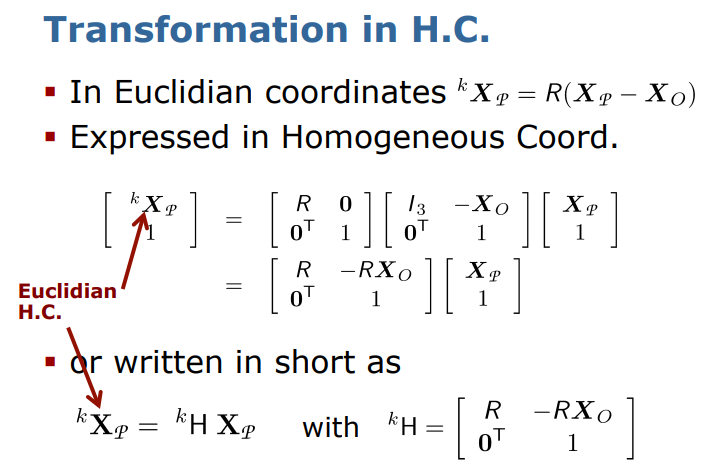 동차좌표계로 표현한 형식
동차좌표계로 표현한 형식
두가지 방식으로 쓸 수 있다
Intrinsic Parameters
inside the camera에서 일어나기 때문에 camera를 이동시키거나 회전해도 영향을 받지 않는다.
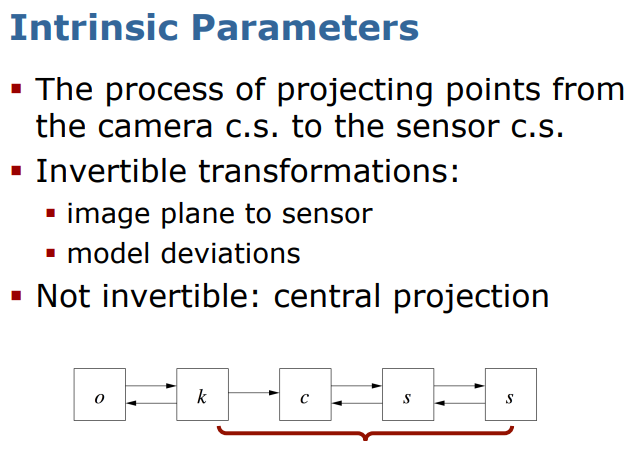 k->c는 not invertible하지만
k->c는 not invertible하지만
나머지 transformation들은 invertible하다
(화살표 방향을 제대로 살펴보면 되지)
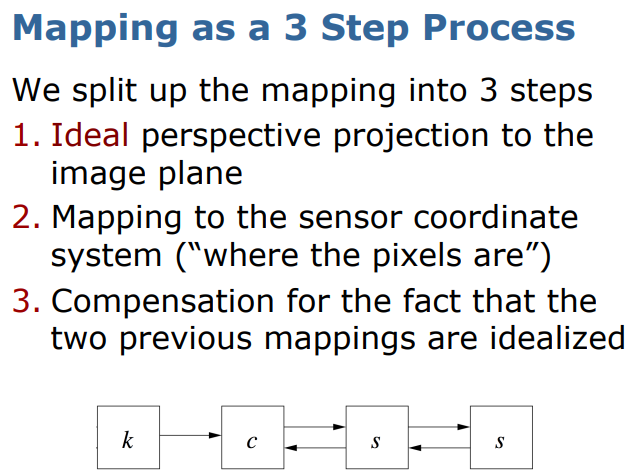 세 단계로 쪼개서 설명할 수 있다.
세 단계로 쪼개서 설명할 수 있다.
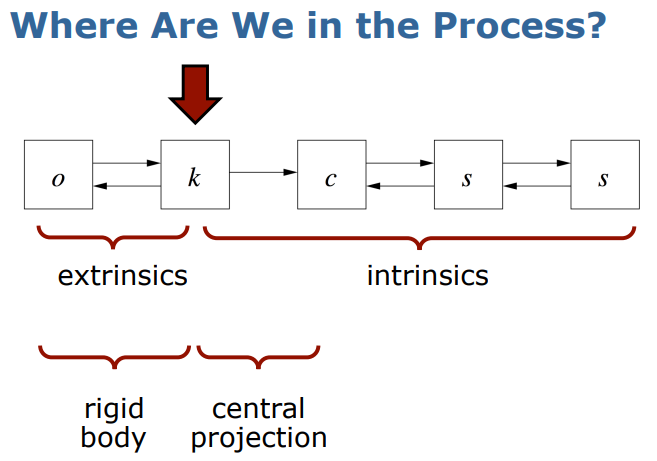
자 이제 central projection에 대해 알아볼 시간 :D
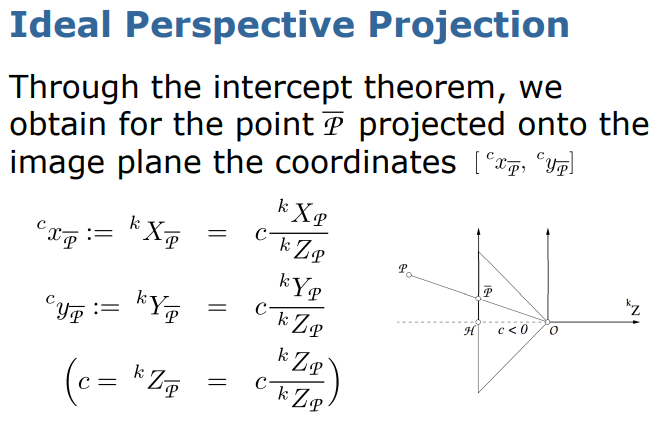
[1] Ideal Perspective Projection
Camera Constant
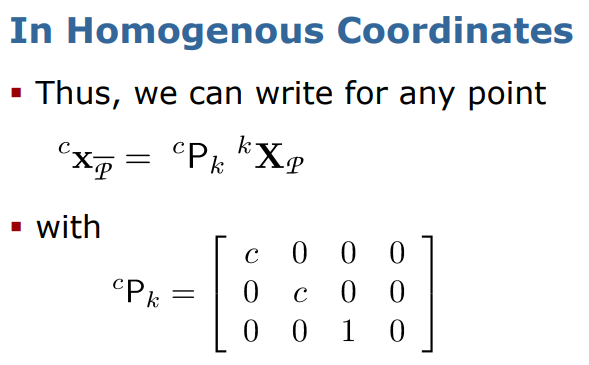
In Homogenous Coordinates
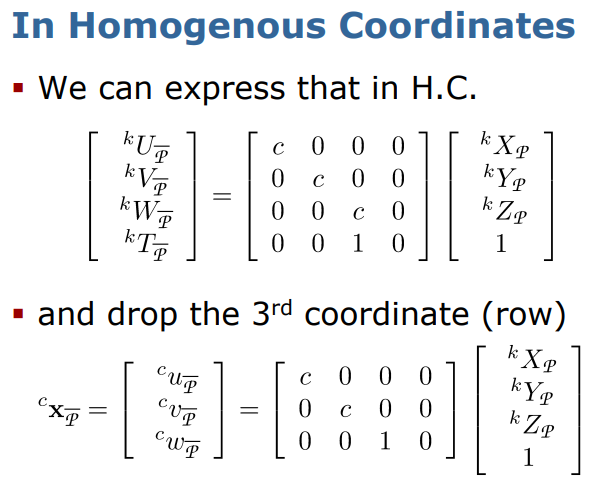 3D에서 2D로 바뀌었다고 생각하면 됨
3D에서 2D로 바뀌었다고 생각하면 됨
Verify the Result
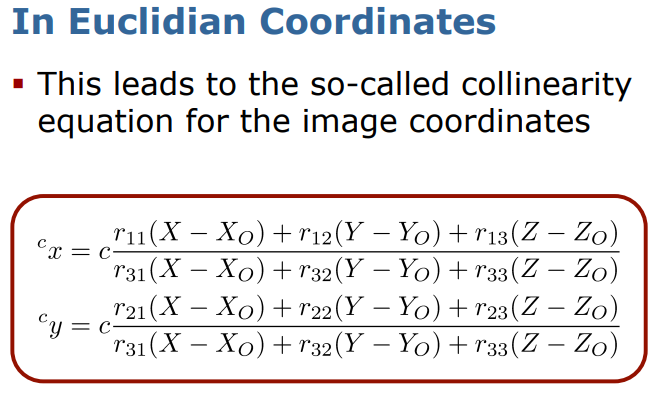
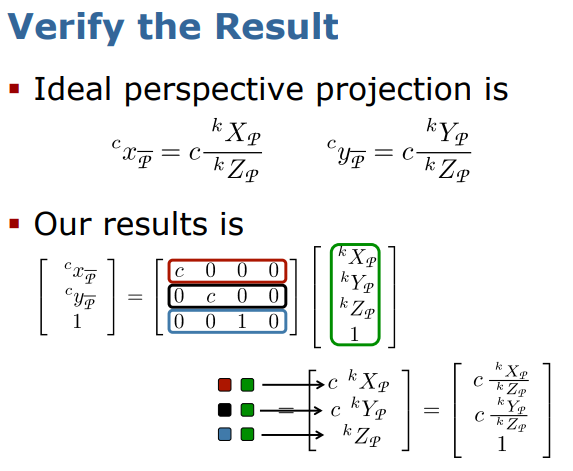 로 나누면 오른쪽벡터가 되는 것을 확인할 수 있음
로 나누면 오른쪽벡터가 되는 것을 확인할 수 있음
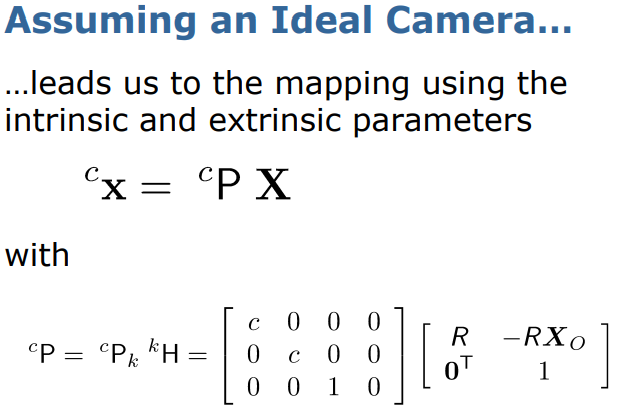 Extrinsic과 Intrinsic을 모두 사용하여 표현한 행렬
Extrinsic과 Intrinsic을 모두 사용하여 표현한 행렬
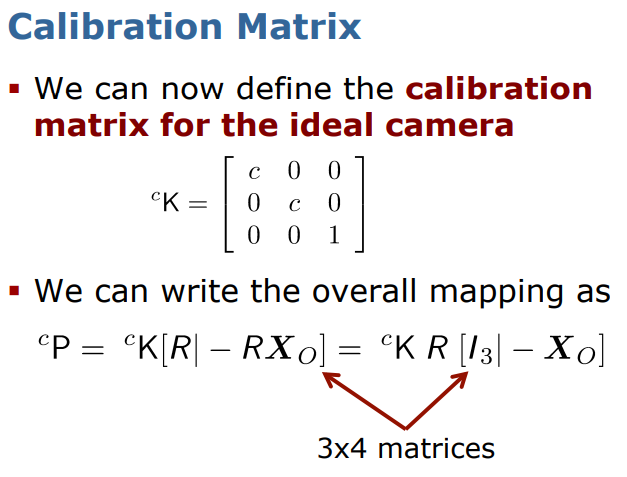
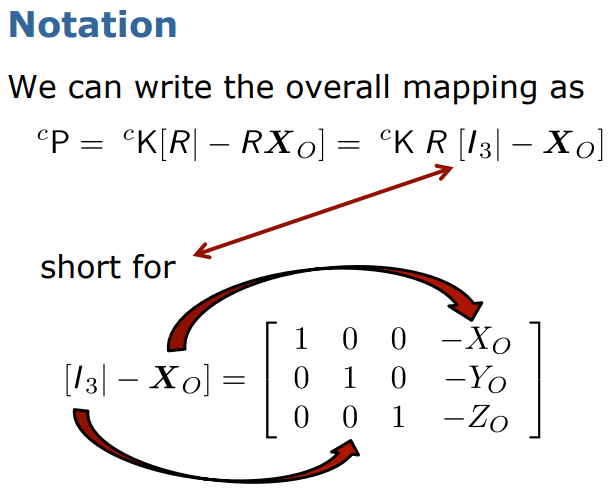
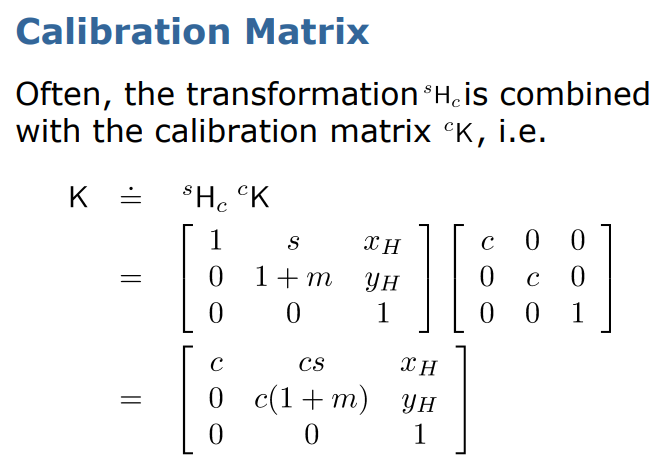
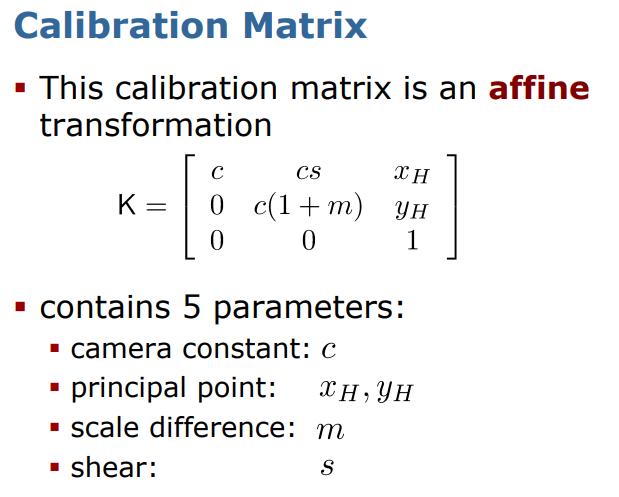
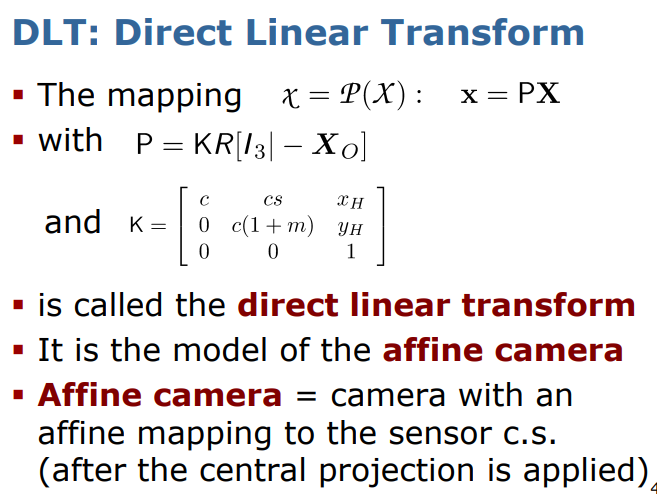
Calibration Matrix
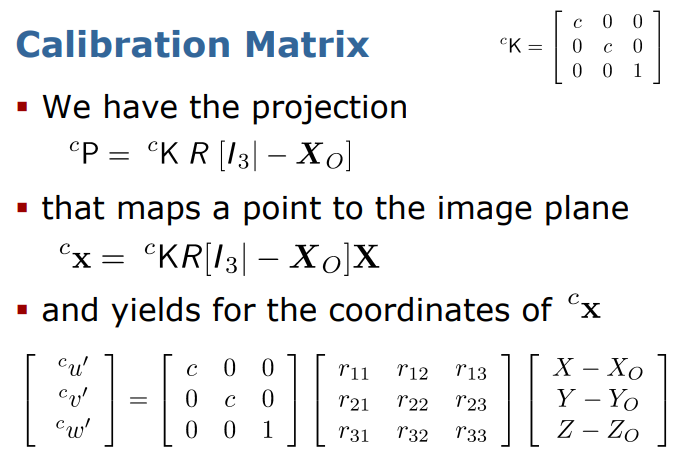
Euclidian Coordinates
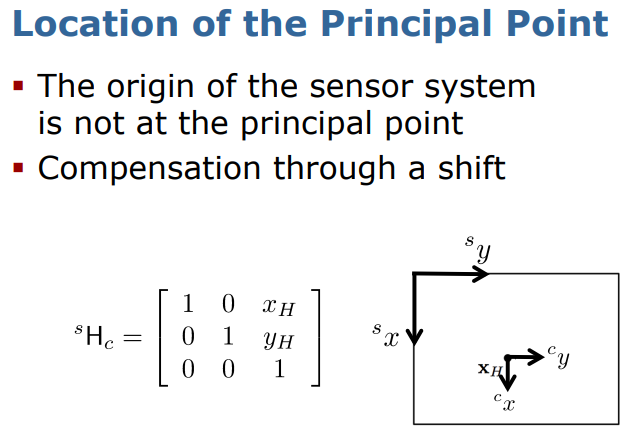
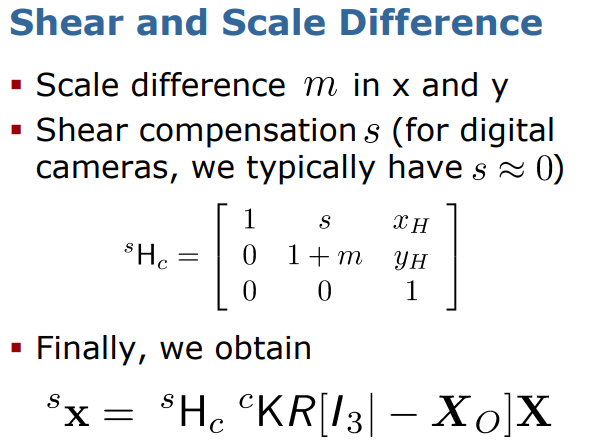
[2] Mapping to the Sensor
(without non-linear errors)
 이제 image plane -> sensor로 가는 과정을 알아볼 것
이제 image plane -> sensor로 가는 과정을 알아볼 것
New Calibration Matrix
DLT: Direct Linear Transform
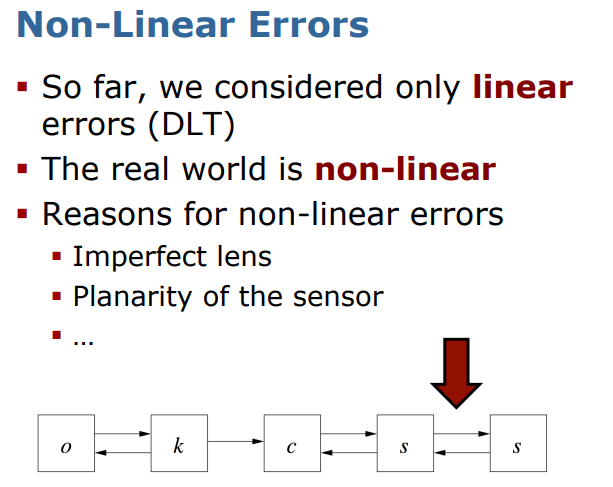
[3] Non-Linear Errors
 이제 마지막 단계를 해볼 차례
이제 마지막 단계를 해볼 차례