1. Back-door Criterion
1.1 Conditional Back-door Criterion
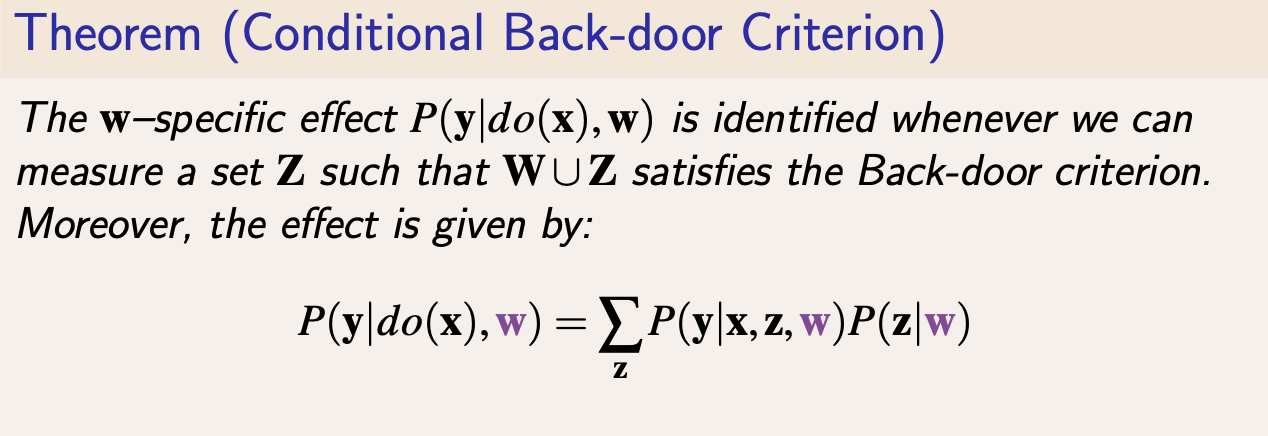
위의 정리에 따르면, 앞서 배운 back-door criterion을 만족하는 변수들에 대해, w를 만족하는 특정 집단에 대한 treatment의 인과효과를 측정할 수 있으며 이를 w-specific effect 라고 부른다.
1.2 Tightness of the Back-door Criterion
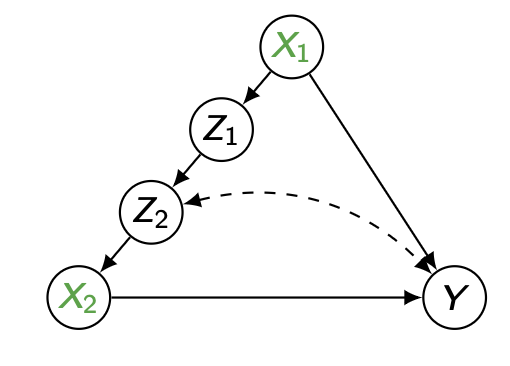
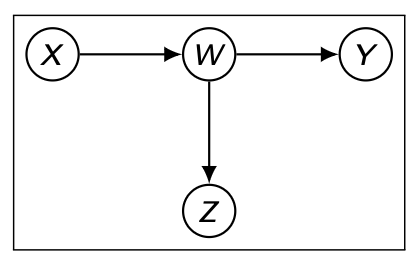
위의 그래프의 경우, 모두 의 후손(descendant) 이므로 back-door criterion을 만족하지 않기에 얼핏 보면 Adjustment formula를 사용하지 못할 것처럼 보인다.
하지만 실제론 를 이용하면 에서 로 가는 back-door path가 끊어지게 되므로 곧 와 같은 형태로 계산할 수 있다.
이에 따라, back-door criterion 이 adjustment formula 를 적용할 수 있는지에 대해 충분조건일 뿐, 필요 충분 조건이 아니기에 이를 정의하고자 한다.
2. Adjustment Criterion
2.1 Proper Causal Paths
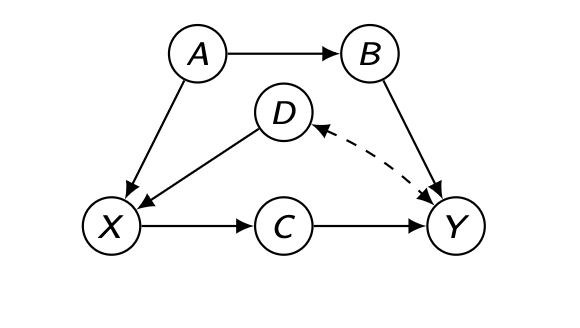
Adjustment formula를 이용하여 인과 효과를 계산할 수 있는 조건을 정의하기에 앞서, 먼저 Proper Causal Path, 곧 실제로 인과 효과를 일으키는 경로들에 대해 정의내릴 필요가 있다.
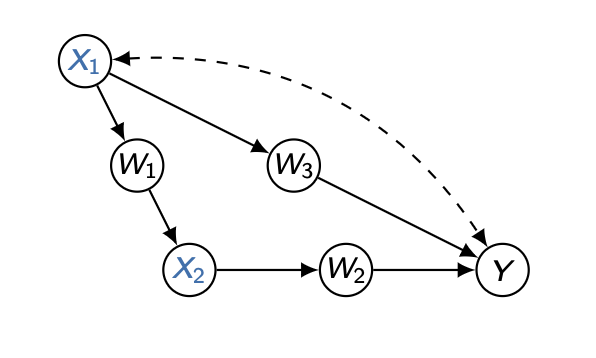
다음의 그래프가 주어져 있다고 생각해보자. Intervention은 곧 주어진 Graph 을 변형하는 것으로, 이를 Graph Surgery 라고도 부른다.
X를 condition 함으로서 우리가 새로운 그래프에서 얻을 수 있는 인과 경로 상의 중간에는 다른 X 집합 안의 변수는 들어올 수 없다. 이유는 intervention은 곧 X 집합 내의 노드들의 incoming edge를 pruning 하는 것이기 때문이다.
고로 우리는 로의 진정한 인과 경로 상에서 출발점을 제외한 그 어떠한 중간 지점에도 X 집합 내 원소는 존재하지 않는다고 정의한다.
Proper Causal Paths of given Graph
Non-proper Causal Path
이때, 만약 proper causal path 의 변수의 자손을 사용할 경우, adjustment formula를 이용하여 인과 효과를 계산할 수 없다.
고로, adjustment criterion 은 identifiability 에 대한 조건이 아닌, adjustment formula 를 사용할 수 있는지에 대한 필요 충분 조건인 것 뿐이므로 이에 주의하도록 하자.
귀류법(Proof by Contradiction)으로 위가 참임을 보여보자.
z를 이용해서 adjustment formula를 통해 X가 Y에 미치는 인과 효과를 계산할 수 있다고 가정하자. 위의 경우 confounding bias 가 존재하지 않으므로 이다.
(in general, but can be equal)
따라서 모순이 발생, z로는 adjustment formula를 사용할 수 없음을 쉽게 알 수 있다.
2.2 Implementation of Adjustment Criterion
이산 수학적으로 주어진 집합 X, Y, Z와 에 대해 Z가 adjustment criterion을 만족하는지 여부를 반환하는 알고리즘을 설계해보자.
Graph after intervention (do(X))
이때, proper causal path로 이루어지고 bidirected edge를 제거한 그래프를 라 표현할 수 있고, 라 표시하자.
Set of variables forbidden to adjustment
우선적으로 인지 확인한다. 만약 공집합이 아니라면 adjustment criterion을 위배하므로 바로 False 를 반환한다.
그 다음 D-Separation 여부를 확인하는데, 요약하자면 proper non-causal path들을 전부 본 다음 각 Path 별로 in-active triplet 이 존재하는지 확인하는 과정이라 말할 수 있다. 그렇게 모든 proper non-causal path가 d-separated 되었다면 Adjustment Formula를 적용할 수 있다.
3 Algorithms
3.1 Checking for Adjustment Criterion
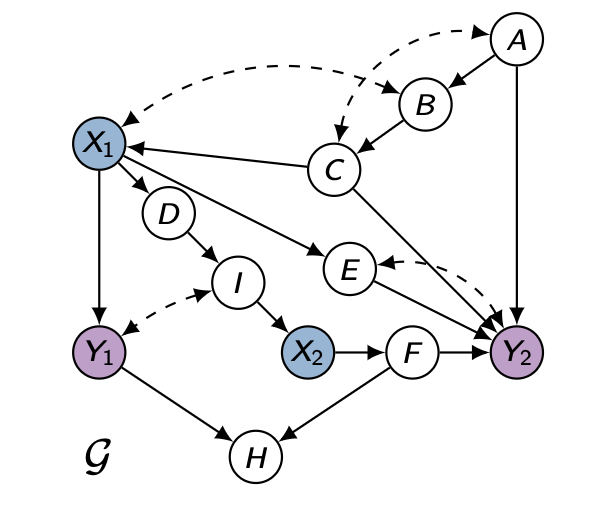
주어진 그래프 에 대해, 는 adjustment criterion을 만족하는가?
(Is given set Z is admissible for adjustment?)
우선 proper causal path들을 전부 작성한다.
Proper Causal Paths in
이때, Proper causal path 내 변수들의 descendant 들을 정리한다.
Descendants of variables in proper causal path
(Descendant of both )
그러고 난 뒤, Proper causal path의 각 첫 번째 간선을 끊어버린다.
Why?
Proper causal path의 첫 번째 간선을 잘라내면 집합 X 내 변수들에서 Y로 가는 경로들은 proper non-causal path 만 존재한다.
이후에 C, D, I 변수들이 given일 때 하나 이상의 active path가 존재한다면 proper non-causal path를 모두 막지 못하므로 adjustment criterion을 만족하지 못하고, 어떠한 경로도 존재하지 않는다면 adjustment criterion을 만족한다고 볼 수 있다.
3.2 Construction of Admissible Sets
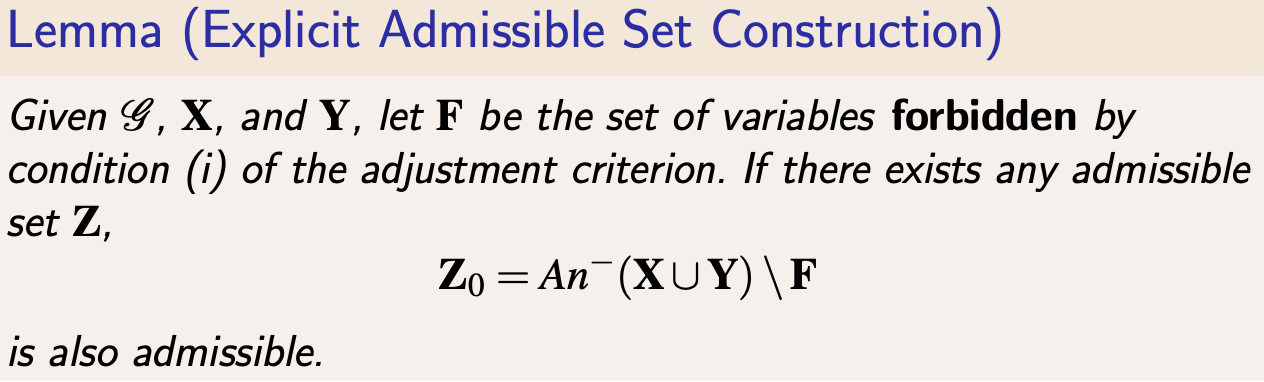
쉽게 말해서, 만약에 adjustment criterion을 만족하는 어떠한 집합 Z가 존재한다면 X와 Y의 조상 집합에서 X, Y, F를 뺀 집합 는 무조건 adjustment criterion 을 만족 시킨다는 것이다.
다르게 말하면? Contraposition 인 가 adjustment criterion을 만족하지 못한다면 어떠한 집합 Z도 adjustment criterion을 만족시키지 못한다는 것이다.
하지만 현실에선 모든 변수들을 관찰 가능한 것이 아니기 때문에, 다른 변수 집합 Z를 알 수 있다면 그 중 사용 가능한 집합을 사용하여 인과 효과를 계산할 수 있기에 이에 대한 알고리즘이 필요했다.
Polynomial Delay Class
모든 가능한 를 열거하여 하나 하나 가능한지 확인하는 것은 못해도 지수 시간이 소요됨. (각 경우당 이 소요된다고 해도
그렇다면 전체 시간 자체는 지수 시간 아래로 낮출 수 없다고 하더라도 각 조합 별 시간 간격을 다항 시간으로 효율적으로 할 수 있다면?
이를 만족 시키기 위해 Inclusion and Restriction 을 활용한 Divide-and-Conquer 전략을 채택한 것이 바로 List-Seps 알고리즘이다.
앞서 다루었던 Forbidden Set F 에 대해, 라 하자.
이때, 처음에 라 하고, graph 에서 proper causal path의 첫 간선을 끊어두었다고 생각하자.
이때, 각각 inclusion, exclusion 하며 아래와 같은 이진 트리 형태로 전개해가며 inclusion set과 exclusion set이 같아질 때까지 트리를 전개하고, 중간에 d-separation 을 restriction set이 만족하지 못한다면 pruning 하는 식으로 전개할 수 있다.
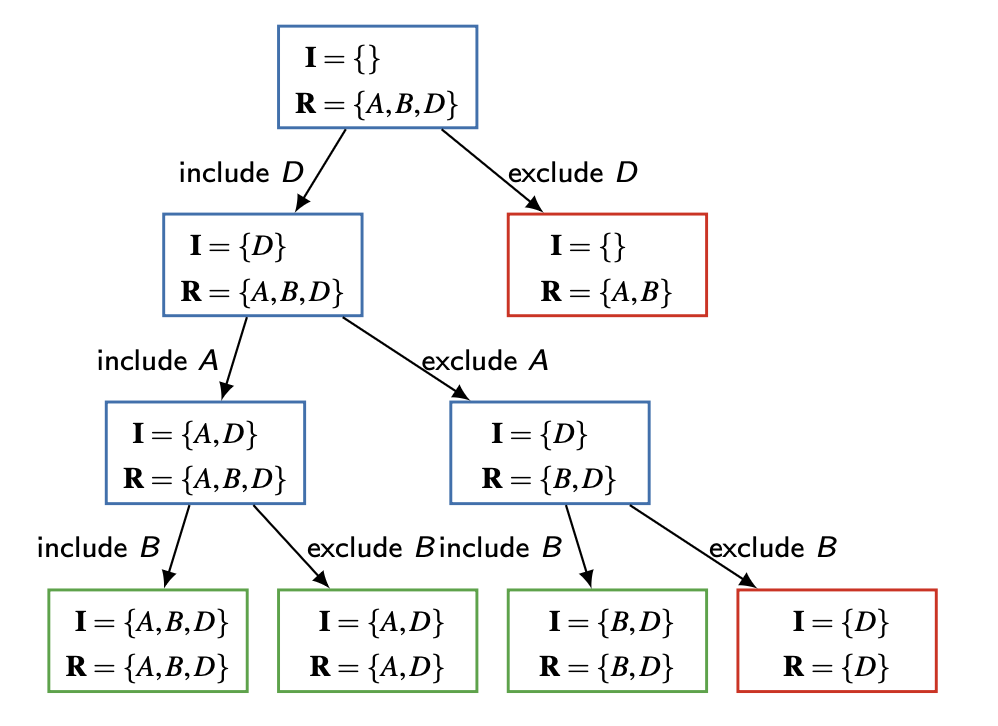
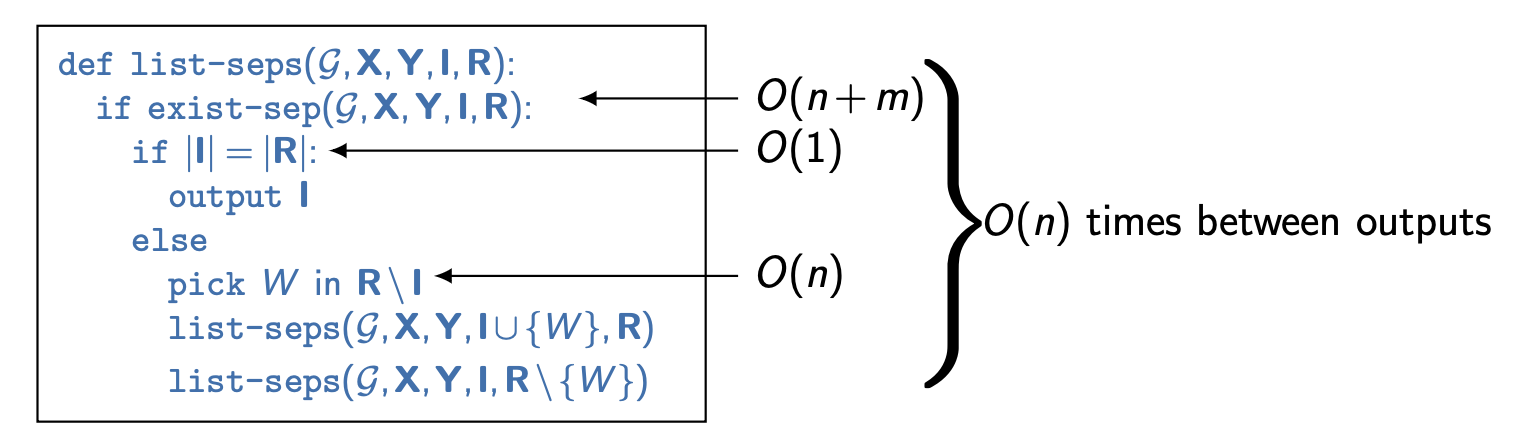
그에 따라, 각 조합 별 간격은 로 polynomial delay를 만족한다.