1. Polyak’s Step Length
이번 포스트에서는 먼저 Polyak이 제안한 step length 선택 방법에 대해 알아볼 예정이다. Optimal value인 f⋆를 알 때, 아래와 같은 step size를 선택할 수 있다.
αk=∣∣g(k)∣∣22f(x(k))−f⋆
어떻게 이러한 step size가 도출되는 것일까? 아래의 식을 보자.
f(x(k)−αg(k))≈f(x(k))+g(k)T(x(k)−αg(k)−x(k))=f(x(k))−αg(k)Tg(k)
좌변을 f∗로 대체하고 α에 대해 정리하면 위와 같은 step length가 얻어지는 것을 확인할 수 있다. 나아가 지난 포스트에서 확인했던 식 2∑i=1kαi(f(xi)−f∗)≤R2+∑i=1kαi2∣∣g(i)∣∣22 의 step size 자리에 αk를 대입하고 정리함으로써 Convergence를 확인할 수 있다.
i=1∑k(f(x(i))−f⋆)2≤R2G2⇒f(x(k))→f∗
또한 suboptimality인 ϵ 을 보장하는 steps의 수는 k=(RG/ϵ)2 이다.
2. Polyak step size choice with estimated f∗
위의 step size αk는 f∗를 알아야 계산될 수 있는데, 이번에는 이 optimal value를 fbest−γk로 estimate 하는 방법에 대해 다루고자 한다. 이때 γk는 γk>0, γk→0를 만족한다.
step size : αk=∣∣g(k)∣∣22f(x(k))−fbest(k)+γk, (∑k=1∞γk=∞)
이때의 γk 는 현재 point의 estimate of suboptimal 이며, ∑k=1∞γk=∞을 만족한다. 그렇다면 fbest(k)→f⋆ 이 만족된다. 이번에도 수렴성을 살펴보자.
R2≥i=1∑k(2αi(f(x(i))−f∗)−αi2∣∣g(i)∣∣22)=i=1∑k∣∣g(i)∣∣222(f(x(i))−fbest(i)+γi)(f(x(i))−f∗)−(f(x(i))−fbest(i)+γi)2=i=1∑k∣∣g(i)∣∣22(f(x(i))−f(i)best+γi)((f(x(i))−f∗)+(fbest(i)−f∗)−γi)=S
만약 fbest(k)−f∗≥ϵ>0 라면 i=1,...,k에 대해 f(x(i))−f∗≥ϵ가 만족되고, 이는 곧 (f(x(i))−f∗)+(fbest(i)−f∗)−γi≥ϵ을 암시한다. 이때 위의 합을 쪼갬으로써 아래와 같은 관계식을 도출할 수 있다.
i=N∑k∣∣g(i)∣∣22(f(x(i))−f(i)best+γi)((f(x(i))−f∗)+(fbest(i)−f∗)−γi)≤R2−S
이제 f(x(i))−fbest(i)+γi≥γi와 ∣∣g(i)∣∣22≤G를 이용하여 수렴성을 최종적으로 확인하자.
(ϵ/G2)i=N∑kγi≤R2−S
이때 좌변이 ∞ 으로 converge하고 우변이 변수 k에 대한 식이 아니므로 k는 너무 클 수 없다.
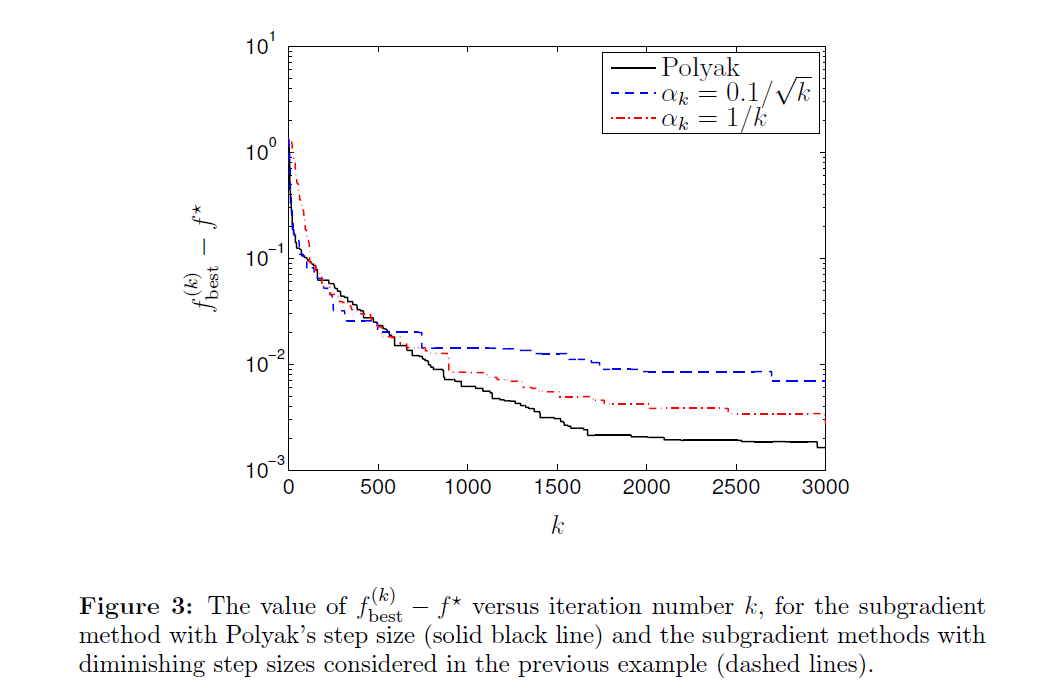
Piecewise linear example을 Polyak’s step size로 진행한 sub-gradient method의 결과이다. 문제를 풀기 전에는 f⋆ 의 값을 모르기 때문에 사실 현실적인 문제들에 적용하기는 어렵다. 또한 수렴 속도가 꽤 느린 것을 관찰할 수 있다.
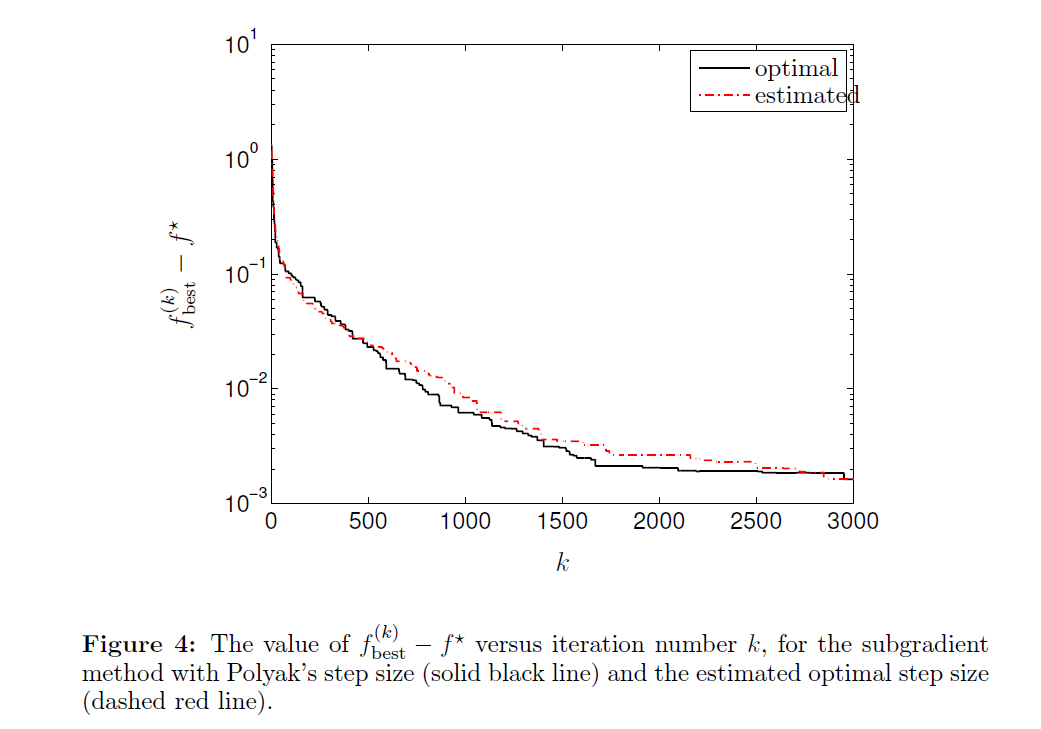
똑같은 문제의 optimal step size와 estimated step size에 대한 fbestk 를 보여준다. Estimated optimal value를 사용한 Polyak step size가 known optimal value의 step size만큼 좋은 결과를 보이고 있다.
3. Alternating Projection
Alternating projections method는 convex sets들의 intersection에 있는 점을 찾는 기법으로, 이 과정에서 Polyak’s step이 어떻게 사용되는지를 설명하고자 한다.
C1,...,Cm⊆Rn 이 closed and convex한 sets일 때, C=C1∩⋯∩Cm 에 있는 점을 찾는 문제는 다음 함수를 minimizing함으로써 풀 수 있다.
f(x)=max{dist(x,C1),…,dist(x,Cm)}
이때 f(x)는 convex하고 f⋆=0 이라는 minimum value를 갖는다. 그리고 f의 x에서의 sub-gradient g를 찾는 방법은 다음과 같다. (f(x)=0 이면 g=0 이다)
g=∇dist(x,Cj)=∣∣x−∏Cj(x)∣∣2x−∏Cj(x)
이때 ∏Cj 는 Cj로의 Euclidean projection이고 ∣∣g∣∣2=1 이므로 G=1 이다. j를 x(k)가 Cj에 최대 거리를 가지는 index라 정의하고, 앞에서 나온 step size 식을 활용하여 sub-gradient algorithm을 update하면 다음과 같은 결과를 얻는다.
x(k+1)=x(k)−αkg(k)=x(k)−f(x(k))∣∣x−∏Cj(x)∣∣2x−∏Cj(x)=Cj∏(x)
이때 두 번째 줄에서 ∣∣g(k)∣∣2=1 과 f⋆=0 을 사용하면 다음과 같은 식을 얻는다.
f(x(k))=dist(x(k),Cj)=∣∣x(k)−Cj∏(x(k))∣∣2
이는 현재의 점을 가장 먼 set에 projection 시키는 간단한 알고리즘이다. Alternating projections algorithm의 확장판이라고 생각하면 된다. 유의해야 할 것은, f(x(k))→f⋆=0 은 보장되지만 C 안에 있는 정확한 점을 찾는 것은 보장되지 않는다는 점이다. 교재에서는 이를 해결하기 위한 크게 두 가지의 방법을 제시하고 있다.
(1) Closed sets인 Ci~⊆intCi 를 사용하여, x(k)→C~=C1~∩⋯∩Cm~ 이 만족된다면 x(k)∈C 인 k가 존재함을 이용한다.
(2) 각 step에 over-projection을 한다. 즉 C에 radius ϵ인 Euclidean ball을 있다고 가정하면 Euclidean ball의 center인 현재의 점을 가장 먼 set에 project 하면서 ϵ 을 바꿀 수 있다.
x(k+1)=Cj∏(x(k))−ϵ∣∣x(k)−∏Cj(x(k))∣∣2x(k)−∏Cj(x(k))
이런 alternating projections은 projection하는 sets이 간단할 때 주로 사용한다.
이번에는 Convex inequalities를 다루는 방법에 대해 살펴보자. fi(x)≤0, i=1,…,m 을 만족하는 점을 찾는 문제가 있다. 이런 convex inequalities의 set을 풀기 위해서는 subgradient method를 사용하여 unconstrained function인 f(x)=maxifi(x) 를 minimize해야 한다. 이때 inequalities가 strictly feasible하면 f⋆<0이고, finite한 step을 통해 f(x)≤0 인 점을 찾을 수 있다.
ϵ>0 이 tolerance일 때 f(x)=max{f1(x),…,fm(x),−ϵ} 에 대하여 fi(x)≤−ϵ 인 점이 있다고 가정하면 step length 는 다음과 같다.
step size : α=∣∣g∣∣22f(x)+ϵ
간단함을 위해 ϵ=0 이라 가정하고 위의 step length에 대한 해석을 해보자. 현재의 점 x 에 대하여 fi(x)=f(x)>0 이고 g∈∂fi(x) 라 하자. x⋆가 fi(x⋆)≤0인 점이라면 다음을 얻는다.
0≥fi(x⋆)≥fi(x)+gT(x⋆−x)
즉, H={z ∣ 0≥fi(x)+gT(z−x)}에 대해 x∈H이다. 우리는 Polyak’s step length를 사용하여 x에서의 sub-gradient를 업데이트하는 것이 x를 H에 projection하는 것과 같음을 알 수 있다.
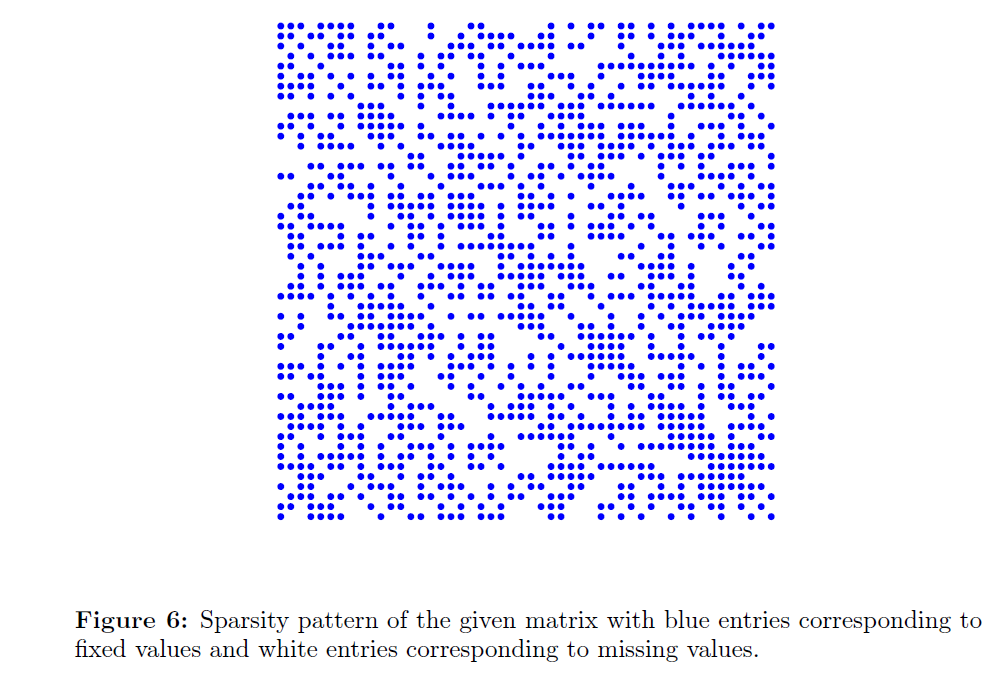
마지막으로, sub-gradient method가 positive semidefinite matrix completion problem을 푸는 데 어떻게 사용될 수 있는지를 살펴보자. 이는 Sn에 있는 matrix에 대해 diagonal entries을 포함한 몇몇의 entries 이 고정되어 있는 상황에서 다른 entries 들을 채워넣어야 하는 문제이다. 목표는 빈 entries들을 채워넣어 matrix가 positive semidefinite가 되도록 만드는 것이다.
Positive semidefinite matrices 인 S+n의 set 과 고정된 entries 로 이루어진 matrix에서 alternating projection 을 사용한다. 첫 번째 projection은 eigenvalue decomposition 을 통해 찾을 수 있다. X=∑i=1nλiqiqiT 라 하면 ∏(X)=i=1∑nmax{0,λi}qiqiT이다. 두 번째 projection은 주어진 matrix의 fixed entries들을 fixed values 로 바꾸면 된다.
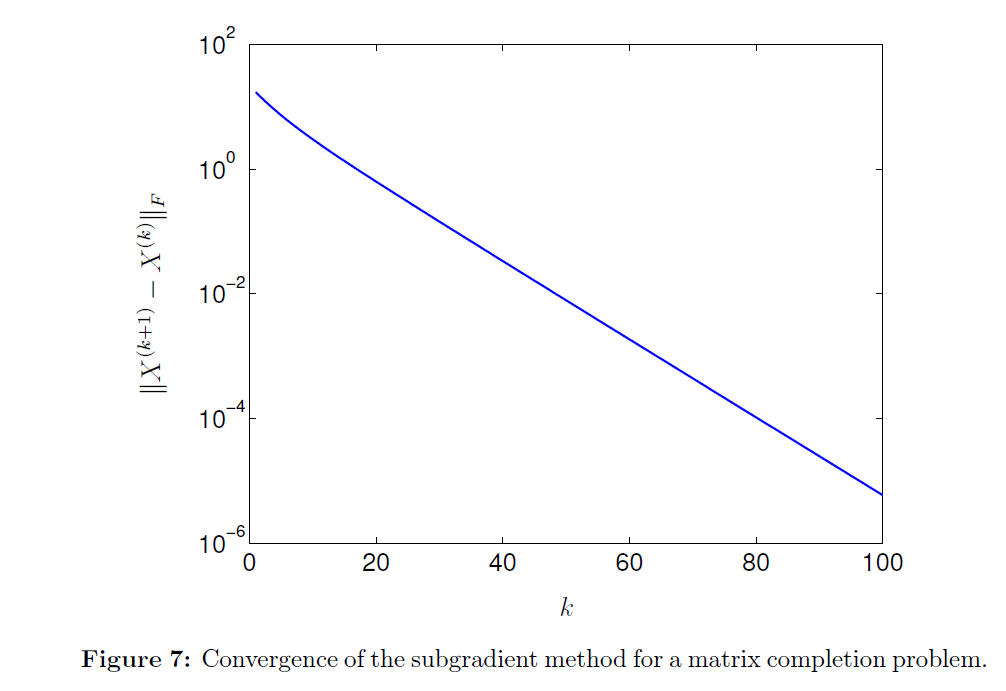
50×50 matrix의 예시를 보면 unknown entries 들이 positive semidefinite completion 으로 아주 잘 수렴하고 있음을 관찰할 수 있다.
4. Projected sub-gradient method
이번에 살펴볼 Projected sub-gradient method는 sub-gradient method의 확장으로, convex set으로의 제약 조건이 있을 때 optimization 문제를 풀기 위한 방법이다.
minimize f(x)subject to x∈C
Projected sub-gradient method는 다음과 같이 주어진다.
x(k+1)=Π(x(k)−αkg(k))
그냥 sub-gradient method와 비교했을 때 Π가 추가된 점이 다르다. 이 Π는 constraint set C로 projection 해주는 operator, 즉 negative sub-gradient 방향으로 이동한 뒤 projection 해준다는 의미를 지닌다 이때의 convergence는 standard case와 동일하게 성립한다.
z(k+1)을 projection 전의 point로 놓고 optimal point와의 distance에 대입해 정리해 보자.
∥z(k+1)−x∗∥22=∥x(k)−αkg(k)−x∗∥22=∥x(k)−x∗∥22−2g(k)T(x(k)−x∗)+αk2∥g(k)∥22≤∥x(k)−x∗∥22−2αk(f(x(k))−f∗)+αk2∥g(k)∥22
이때 z(k+1)을 C로 projection 시켰으므로 C 안의 점인 optimal point에 더 가까워지는 것은 당연하다. 따라서 ∥x(k+1)−x∗∥22≤∥z(k+1)−x∗∥22 이고, 이 둘을 합치면 ∥x(k+1)−x∗∥22≤∥x(k)−x∗∥22−2αk(f(x(k))−f∗)+αk2∥g(k)∥22 의 inequality를 얻을 수 있다. 이는 standard sub-gradient method의 convergence 증명에서 얻은 결과와 일치하므로, projection이 convergence에 영향을 미치지 않는다는 것을 알 수 있다. 앞에서 나온 Polyak’s step length를 적용해도 convergence는 동일하게 성립한다고 한다.
만약 C={x∣Ax=b}꼴의 affine set이라면 Ax(k)=b이므로 A의 null space로 projection해주면 된다. 그리고 null space는 AT의 column space의 orthogonal complement이므로 sub-gradient update는 아래와 같이 도출된다.
x(k+1)=x(k)−αk(I−HT)g(k)
이처럼 operator를 연산하기 쉬운 경우에는 projected sub-gradient method를 잘 사용할 수 있다.
(Example) l1 norm problem
minimize ∥x∥1subject to Ax=b
x∈Rn이고 A는 full column rank라고 가정하자. l1 norm의 subgradient는 sign(x)이다. 따라서 업데이트 공식은 아래와 같다.
x(k+1)=x(k)−αk(I−AT(AAT)−1A)sign(x(k))
이번에는 dual problem에 대해 projected sub-gradient를 적용해보자. convex optimization problem의 dual problem을 정의하는 것은 익숙하다.
maximize g(λ)subject to λ⪰0
strong duality가 성립할 때, (가령 slater’s condition을 만족할 때) lambda의 optimal값을 구한 뒤 역으로 x의 optimal 값을 구할 수 있었다. (x∗=x∗(λ∗) 이 dual problem 역시 sub-gradient method를 이용해 풀 수 있다. 업데이트 식은 다음과 같다.
λ(k+1)=(λ(k)−αkh)+,h∈∂(−g)(λ(k))
라그랑지안에 대한 sub-gradient는 아래와 같이 찾을 수 있다.
−g=−f0(x∗(λ))−i=1∑mλifi(x∗(λ)),h=−(f1(x∗(λ)),...,fm(x∗(λ)))
Dual problem에 대한 projected sub-gradient method의 업데이트 식은 다음과 같이 정의된다.
x(k)=xargmin(f0(x)+i=1∑mλi(k)fi(x))
λi(k+1)=(λi(k)+fi(x(k)))+
이때 primal variable x는 limit에서만 feasible하다. 또한 dual function value와 primal function value는 optimal로 같이 수렴한다.
5. Sub-gradient method for constrained problem
minimize f0(x)subject to fi(x)≤0,i=1,...,m
제약 조건이 있는 convex optimization의 경우에도 sub-gradient update 식은 앞과 똑같다. 다만 현재 x값이 feasible, infeasible한지에 따라 objective의 sub-gradient를 사용할지, 또는 violated된 constraint의 아무 subgradient를 사용할지가 달라진다.
g(k)∈{∂f0(x(k))∂fj(x)fi(x)≤0,i=1,...,mfj(x)>0
다 결국 iteration이 반복됨에 따라 optimal point로 수렴함을 귀류법으로 증명할 수 있다. Polyak’s step length를 사용하고 f∗를 안다고 하면 현재 상태가 feasible이냐, infeasible이냐에 따라 아래와 같이 step size를 선택한다.
αk={(f0(x(k))−f∗)/∥g(k)∥22(fi(x(k))+ϵ)/∥g(k)∥22x(k)is feasiblex(k)infeasible
A. Directional Derivative
Directional Derivative의 개념이 포스트 전반에 등장하여, 이를 쉽게 이해할 수 있도록 Kahn Academy의 아래 영상 내용과 기타 자료들을 정리하였다.
https://www.youtube.com/watch?v=N_ZRcLheNv0
Directional derivative, ‘방향도함수’라고 칭해지는 이 개념은 쉽게 말해 편도함수의 확장이라고 볼 수 있다. f(x,y)=x2y로 정의된 함수를 생각해보자. 해당 함수는 두 개의 변수 즉 multivariable을 받아서 하나의 실수를 출력하는 함수이다. 따라서 input space와 output space를 다음과 같이 표현할 수 있다.
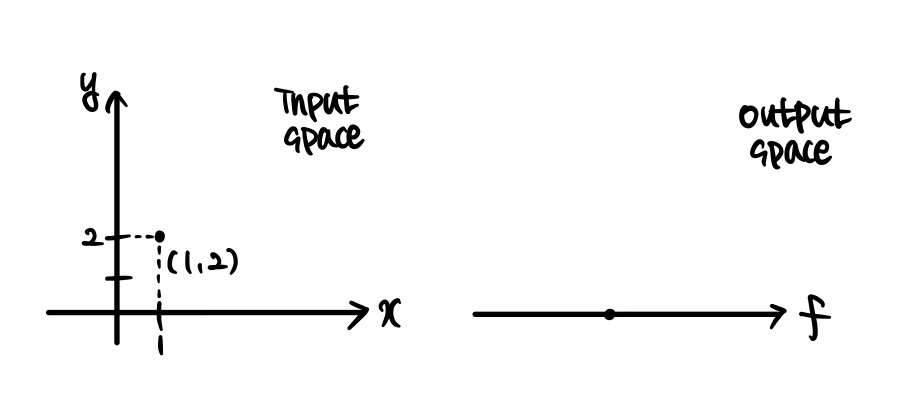
이때 우리가 아는 편도함수와 편미분의 개념에 대해 생각해보자. ∂f/∂x(1,2)가 의미하는 것은 무엇인가? 바로 input space의 점인 (1, 2)를 x축 방향으로 아주 조금 이동했을 때 출력값이 얼마나 이동해야 하는지를 의미한다. 이 출력값이 이동한 거리와 입력값이 이동한 거리의 비가 f의 x에 대한 편도함수에 입력값을 대입한 결과값이 되는 것이다. ∂f/∂y(1,2)도 마찬가지로 해석될 수 있다. 참고로 지금 그림들은 과장해서 그린 것이며, 실제로는 가시적인 변화가 아닌 아주 작은(0에 수렴하는) 변화에 대해 생각하고 있다.
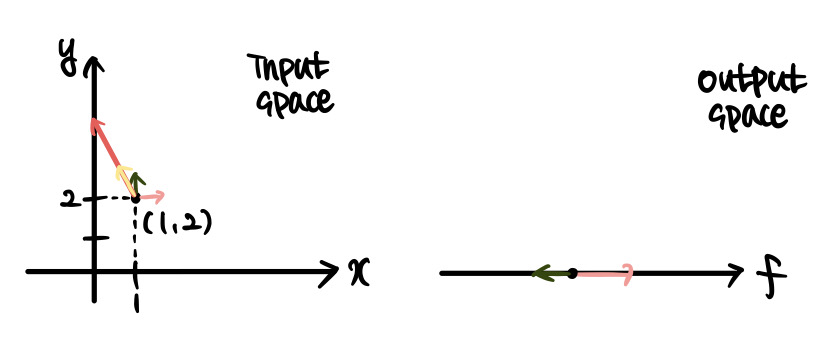
그렇다면 방향 도함수란 무엇인가? (1, 2)를 시점으로 하는 벡터 v를 [−1,2]T로 정의하도록 하겠다. 방향 도함수의 관심사는 이것이다. 입력값을 x나 y 방향이 아닌, 이 벡터의 방향으로 움직인다면 출력값에는 어떤 영향이 갈 것인가? 이 입력값의 변화를 식으로 표현하면 tv가 될 것이다(여기서 t는 아주 작은 값이다). 그리고 우리가 정의한 v값에 따라 [−h,2h]로 표현할 수 있다. 이는 수학적으로 다음과 같은 노테이션을 이용해 표현된다.
[−h,2h]를 보면 방향도함수가 어떤 식으로 계산될 지를 어느정도 예상해볼 수 있다. 아주 작은 단위 h만큼을 x축 방향으로 -1칸, y축 방향으로 2칸 움직였으니 −(∂f/∂x)+2(∂f/∂y) 임을 예상할 수 있고, 실제로도 그렇다. 이를 gradient form으로 일반화 해보자면, 벡터 w가 [a,b]T로 정의될 때 ▽wf=w⋅▽f=wT▽f로 나타낼 수 있다.
그리고 f가 점 x에서 미분 가능하다는 것의 필요충분조건은 방향도함수 값이 어떤 g에 대해서 f′(x;v)=gTv (여기서 g는 ▽f(x)이다) 의 linear한 형태로 표현되는 것이다. 위에 적은 노테이션을 참고했을 때 좌변이 우변의 형태로 정의되기 위해서는 일단 ▽f가 정의되어야 하기 때문이라고 생각하면 될 것 같다.
이제 교재의 내용으로 돌아와서, Convex function f에 대해 점 x에서의 v 방향으로의 방향도함수는 수식적으로 다음과 같이 정의된다.
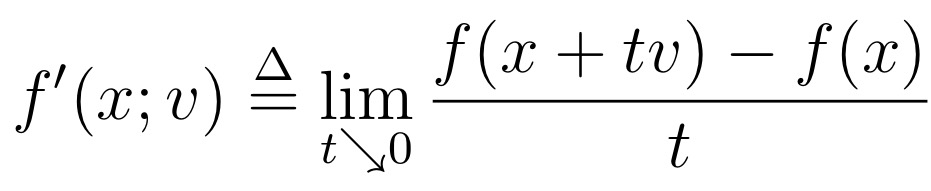
이 방향도함수는 몇 가지 성질을 지니는데, 교재에 나온 성질 중에서 함수의 convexity와 관련된 부분만 얘기하고 넘어가도록 하겠다. ∗∗f가 v에서 convex하고 x의 주변에서 finite 하다면 f′(x;v)는 존재한다**. 좀 더 러프하게 말하자면, (비록 ±∞의 값을 가질 수는 있지만) convex function f의 모든 점은 방향도함수 값을 가진다.
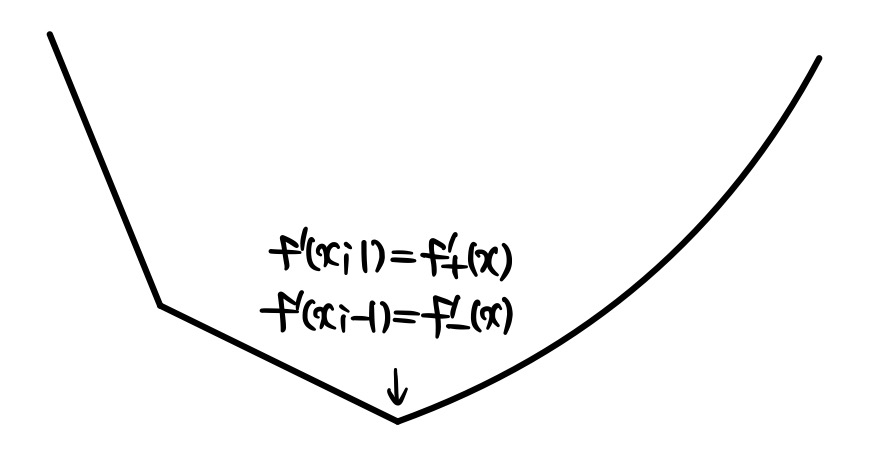
그림으로 살펴보자면, 다음과 같이 convex한 function에 미분 불가능한 점이 있다고 해도 이 점은 이 근처에서는 미분이 가능하기에 방향도함수를 갖는다. 예를 들어 아래의 점을 기준으로 1과 -1이 다른 방향에 있는 상황일 때, f′(x;1)은 f+′(x)이고 f′(x;−1)은 f−′(x)이 된다. 미분 가능하다는 것은 곧 이 방향도함수 값들이 서로 같은 값을 갖는 상황인 것이다.
그리고 방향도함수는 convex function f에 대해 다음의 관계를 만족한다.
f′(x;v)=supg∈∂f(x) gTv
이 등식을 증명하는데 sub-gradient의 개념이 이용된다. f가 x에서 미분가능하다면 그 gradient 값이 곧 sub-gradient 값과 동일하다. 따라서 sub-gradient의 정의에서 z자리에 x+tv를 넣어보겠다. 이때 식은 다음과 같이 정리되는데: f(x+tv)−f(x)≥tgTv, 여기에 리미트를 붙인게 방향도함수이고 모든 t와 g값에 대해서 이 식이 성립해야 하므로 (즉, 우변의 sup에 대해서도) f′(x;v)≥supg∈∂f(x) gTv가 만족된다.
f(x+v)≈f^(x+v)=f(x)+∇f(x)TvΔxnsd=argmin{∇f(x)Tv∣ ∣∣v∣∣=1}
이때 f가 x에서 미분 가능하다면 f가 어떤 g에 대해 f′(x;v)=gTv 꼴로 표현된다고 했기 때문에 등호가 성립한다고 생각할 수 있다.
