2023-Spring
1.[Week 1] Statistical estimation [1]

봄학기 첫 세션에서는 우리가 전공에서 배운 다양한 통계적 기법들이 최적화 문제로서 어떻게 표현될 수 있는지 살펴보았다.
2023년 12월 13일
2.[Week 1] Statistical estimation [2]
이번에는 우리가 잘 아는 확률에 관한 부등식들을 살펴보고, 이들의 더욱 일반적인 형태가 컨벡스 최적화 문제로 표현될 수 있음을 보일 것이다.
2023년 12월 13일
3.[Week 2] Gradient Descent & Newton's Method
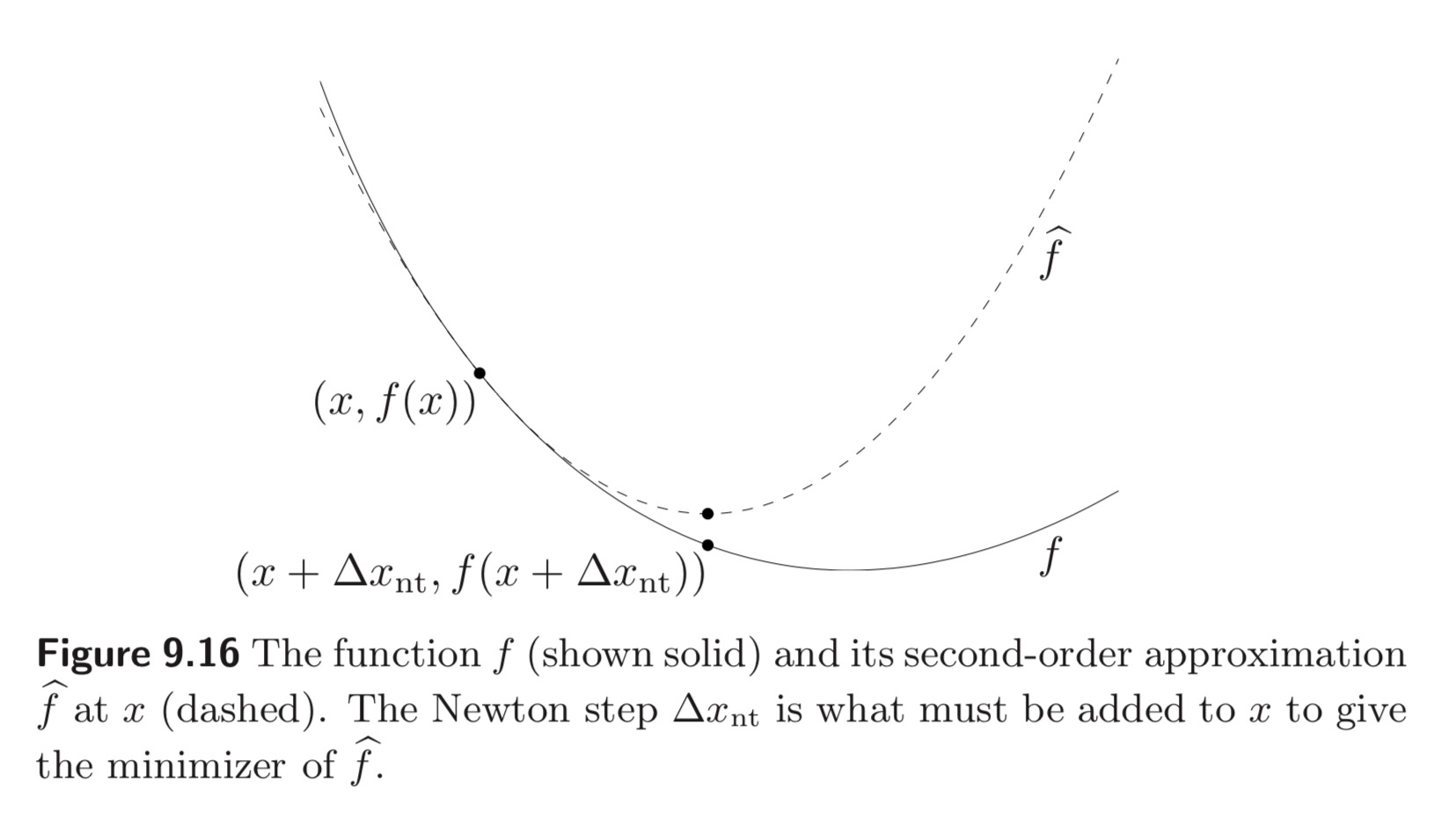
이번 포스트는 아래와 같은 unconstrained minimization 문제를 푸는 방법에 대해 다룬다.
2023년 12월 13일
4.[Week 3] Sub-gradient Method [1]
지금까지 우리는 제약 조건이 없는 Convex한 목적 함수가 모든 점에서 미분 가능하다는 전제 하에 최적화 문제를 해결하는 알고리즘들을 다루었다. 그러나 많은 현실의 문제들은 이와 같이 ‘수학적으로 예쁜’ 모양을 띄고 있지 않다.
2023년 12월 13일
5.[Week 3] Sub-gradient Method [2]
이번 포스트에서는 먼저 Polyak이 제안한 step length 선택 방법에 대해 알아본다.
2023년 12월 13일
6.[Week 4] Robust Optimization [1]
우리가 얻을 수 있는 데이터 중 '완전한 것'은 거의 없다.
2023년 12월 13일
7.[Week 4] Robust Optimization [2]
이번에는 원래의 constraint 자체가 second-order cone 형태로 주어진 robust SOCP에 대해 알아보자.
2023년 12월 13일
8.[Week 4] Robust Optimization [3]
이번에는 이전에 살펴보았던 예시를 일반화해서, constraint 만족을 높은 확률로 보장하는 기회 제한 최적화(chance-constrained optimization)에 대해 알아보자.
2023년 12월 13일
9.[Week 5] Robust Optimization in Machine Learning
봄학기 마지막 세션.
2023년 12월 13일