Bibtex 인용
@INPROCEEDINGS{5979641,
author={Kaess, Michael and Johannsson, Hordur and Roberts, Richard and Ila, Viorela and Leonard, John and Dellaert, Frank},
booktitle={2011 IEEE International Conference on Robotics and Automation},
title={iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering},
year={2011},
volume={},
number={},
pages={3281-3288},
keywords={Simultaneous localization and mapping;Graphical models;Smoothing methods;Sparse matrices;Accuracy;Trajectory},
doi={10.1109/ICRA.2011.5979641}}요약
- 기존의 그래픽 베이스 모델 추론 알고리즘과 sparse matrix factorization method의 연결을 이해하기 위한 기초를 제공
- bayes tree라는 새로운 구조를 통해 제공
- Clique tree와 유사하지만 방향성을 가지는 bayes tree를 제시
- SLAM 문제의 squre root information matrix에 더 자연스럽게 mapping
인트로
- Probabilistic inference algorithm
- 다양한 로봇 공학 분야에서 활용 ex) SLAM, tracking, etc
- 본 연구는 large-scale SLAM에 집중
- 센서의 불확실성 때문에 probabilistic inference algorithm이 선호됨
관련 연구
- Thin Junction Tree Filter (TJTF), 2003
- 그래픽 모델 기반 incremental solution
- non-linear SLAM problem에 대해 일관성 없음
- Full SLAM, 2005
- 모든 로봇 자세에 대해 기록하여 정확한 solution 제공, 일관성 문제 없음
- Graphicall SLAM (Folkesson and christensen), 2004
- locally complexity를 줄이는 방법 제안
- Treemap, 2006
- 트리 노드에서 QR 분해 수행
- Loopy SAM, 2007
- SLAM 그래프에 직접 loopy belief propagation 적용
- iSAM
- 빠른 Incremental 업데이트를 통해 squre root information matrix를 계산하면서 global map과 경로를 언제든 계산 가능
- 새로운 measurements는 matrix update equation을 통해 추가, 이전에 사용된 information matrix의 일부를 활용
- efficiency와 consistency 유지를 위해 periodic batch step이 필요
- 실시간성 유지하지 못함 0.7*realtime으로 진행
기여
- Bayes tree라는 새로운 데이터 구조를 제안
- matrix factorization을 bayes net으로 변환 가능
- QR factorization의 결과가 더 natural하게 mapping됨
- 구조를 conditional probabilistic density로 분석 가능
- iSAM2라는 새로운 알고리즘을 개발함
- Incremental variable re-ordering과 fluid re-linearization, periodic batch step의 제거를 통한 efficiency 개선
- sparse non-linear problem에 효율적 solution
- bayes tree기반 영향을 받는 부분만 re-calculate → 효율성 증대
- 실시간성 확보
Problem
Target
- non-linear한 추정 문제에 대해 incremental하고 real-time인 해결 방법
- incremental: 새로운 measurement가 추가될 때 마다 추정값을 업데이트 현재 측정된 모든 값으로 도출할 수 있는 가장 정확한 환경모델 반영
- real-time: 작업을 수행하는 동안 추정값을 실시간 제공, 탐색 및 계획을 위한 추정값 필요
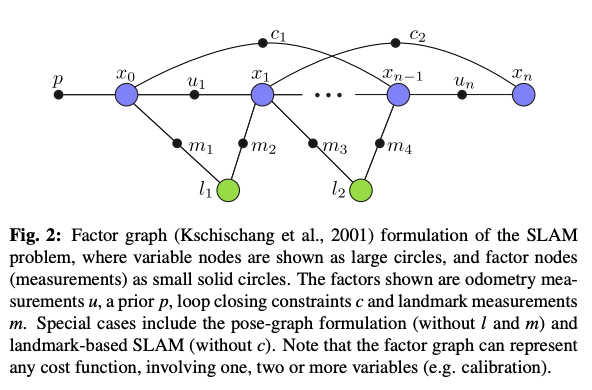
- 주어진 추정 문제를 그래프 모델로 표현하기 위해 factor graph사용
- 다양한 확률 분포나 비용 함수를 포함할 수 있음
- factor node - 랜드마크 측정값, 오도메트리(움직임에 관한 정보), loop closing constraint(재방문 시 발생하는 제약조건) 등
- variable node - 추정하려는 변수, 각 시간 스텝에서의 위치, 랜드마크의 위치 등
Gaussian Case
- non-linear least squre 문제
- - measurement function
- - measurement
- - mahalanobis distance
- linearization
- gauss-newton, levenberg-marquardt
- 각 iteration에서 linearization point 부근에서 테일러 전개를 수행 새로운 least squre 문제를 도출
- - measurement jacobian
- linearization 됐으니까 새로운 추정값은 단순 +로 계산가능
- 의 최소 해는 Cholesky 혹은 QR factorization 을 통해 계산
- iSAM2는 QR factorization 사용
- incrementally update square root information matrix
- measurement 추가 시에 matrix variable의 순서가 최적이 아니게 되고 fill-in현상이 발생할 수 있음
- periodic batch re-ordering을 수행하고 batch factorization 진행
- iSAM과 다르게 re-linearization은 batch 단계에서만 수행
- period of batch step은 heuristically(empirically인듯?
The Bayes Tree
- 기존의 factor graph를 sparse matrix로 바꾸어 sparse linear algebra대신 graph model 자체에서 연산을 수행
Inference and Elimination
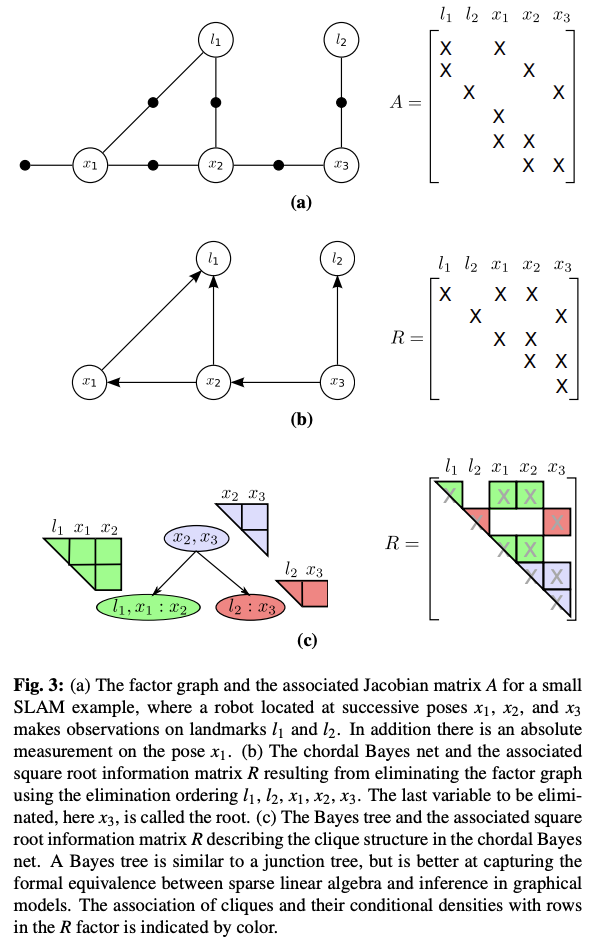
- 추정은 factor graph를 bayes net으로 변환하는 것으로 이해할 수 있음
- 변수 제거
- 는 와 직접 연결된 변수들의 집합
- factor graph 변환 과정
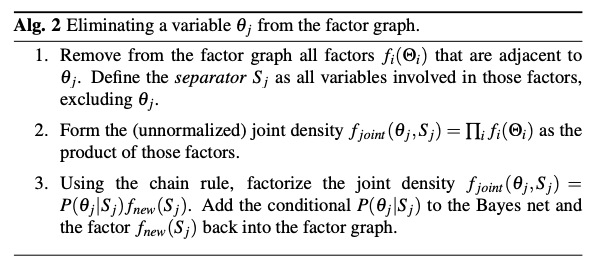
- 위의 과정을 반복하여 모든 variable을 제거하면 bayes net이 됨
- probabilistically variable의 probability의 곱이 conditional probability의 곱으로 변환된는 것과 같음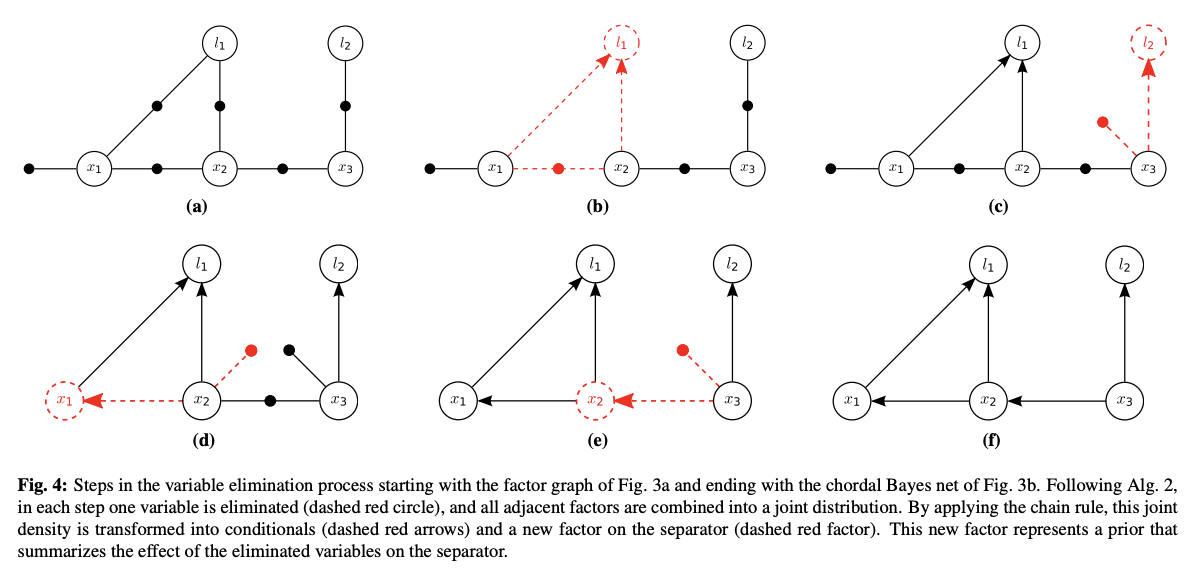
- 위에 그림이 이해가 좀 안됨
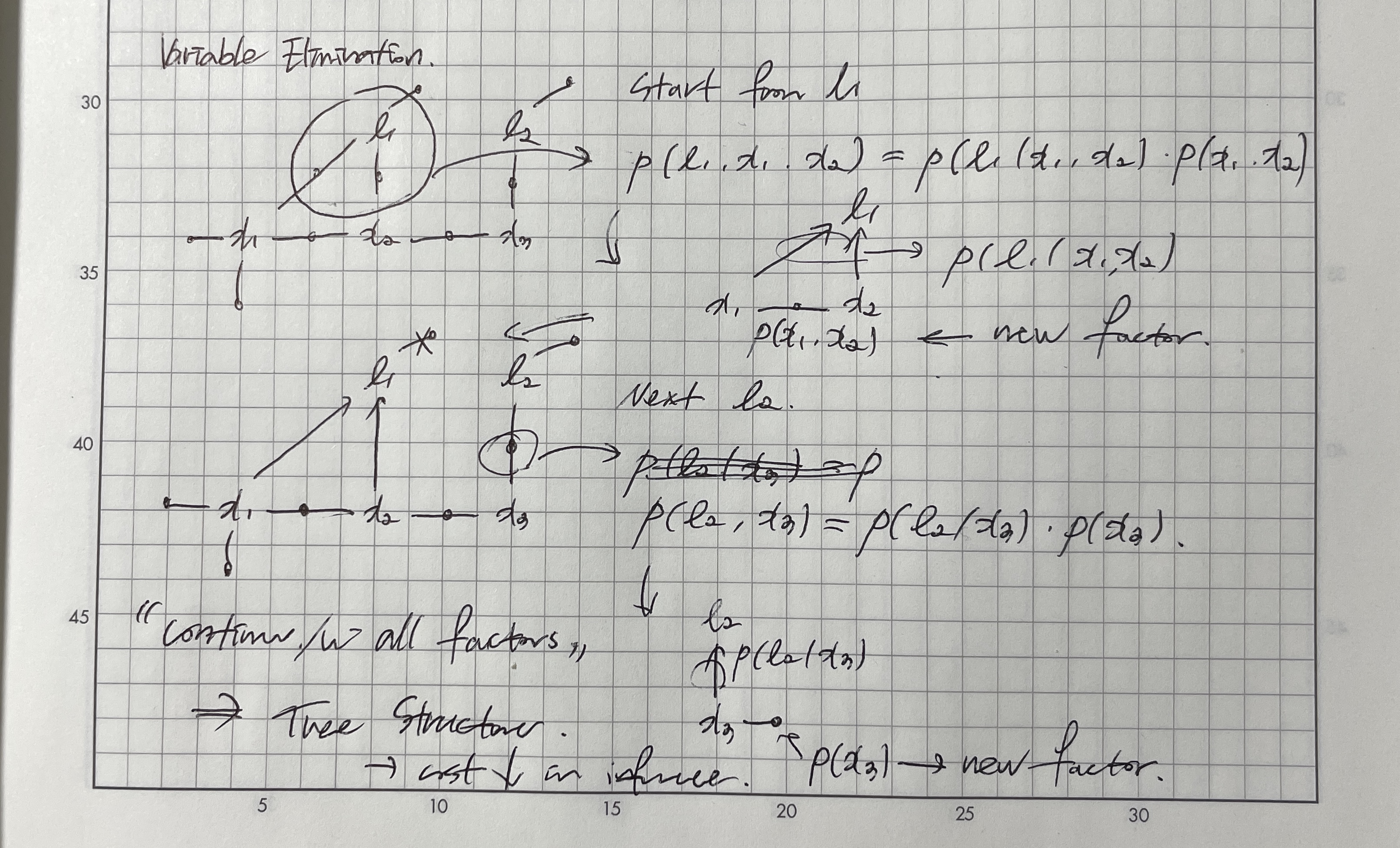
- 모두 제거하고 나면 all factor들이 conditional probability로 표현가능해짐, tree structure를 가지게 됨
- 이것이 부분적으로 새로운 measurement에 대해 inference할 수 있게하는 핵심 요소
Gaussian Case
- elimination 과정이 sparse QR factorization of measurement jacobian과 같음
- factor에 대한 gaussian density는 로 정의
- - 에 연결된 모든 요인의 partial derivatives를 concat한 matrix
- bayes tree로 변환할 때 사용되는 conditional probability는
- 는 의 pseudo-inverse matrix
- - 와 관련된 factor의 일부, partial derivative
- - 와 관련된 measurements
- -
- - 의 partial derivatives 집합
- - seperator; 와 직접 연결된 variable
- 새로운 factor는
- 이 과정은 gram-schmidt의 한 단계, 밀도 형태로 해석됨
- sparse vector 와 scalar 는 bayes net의 single joint conditional density를 지정하거나 sparse information matrix의 하나의 행
- least square problem은 tree의 leaves to root방향으로 한 번 통과하면서 최적의 를 계산, root to leaf 로 내려가며 각 변수의 최적 할당을 구함 → backsubstitution
Creating Bayes Tree
- Bayes tree
- linear algebra와의 equivalence를 더 잘 표현
- 새로운 recursive algorithm을 가능하게 함
- chordal 구조 - 모든 부분 순환 구조의 크기가 3이하, 4 이상이면 현을 가져야함
- 최적화 및 marginalization에 용이
- 방향성을 가지고, factored probability density를 encode하는 방식
- 각 node에 대해 conditional density 정의
- - 클리크 와 부모 클리크 의 intersection
- - 나머지 변수들
Gaussian Case
- 하나의 bayes tree가 여러 다른 square root information factor에 대응할 수 있음
- 임의의 순서가 매겨지기 때문
- 전체 variable의 순서는 fill-in이나 수치에 영향주지 않고 matrix내의 위치에만 영향
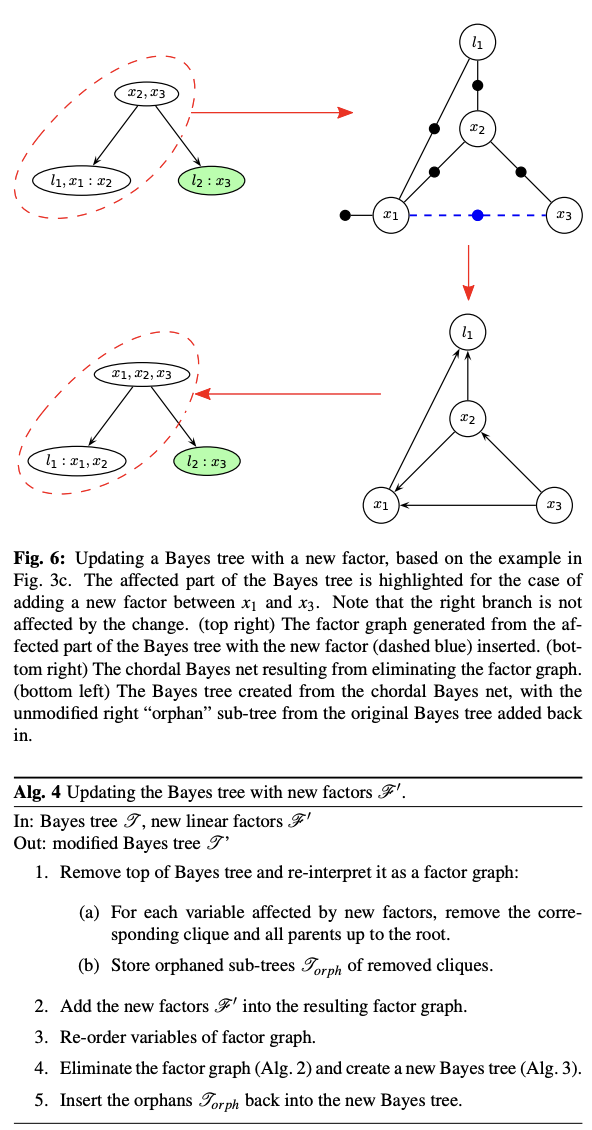
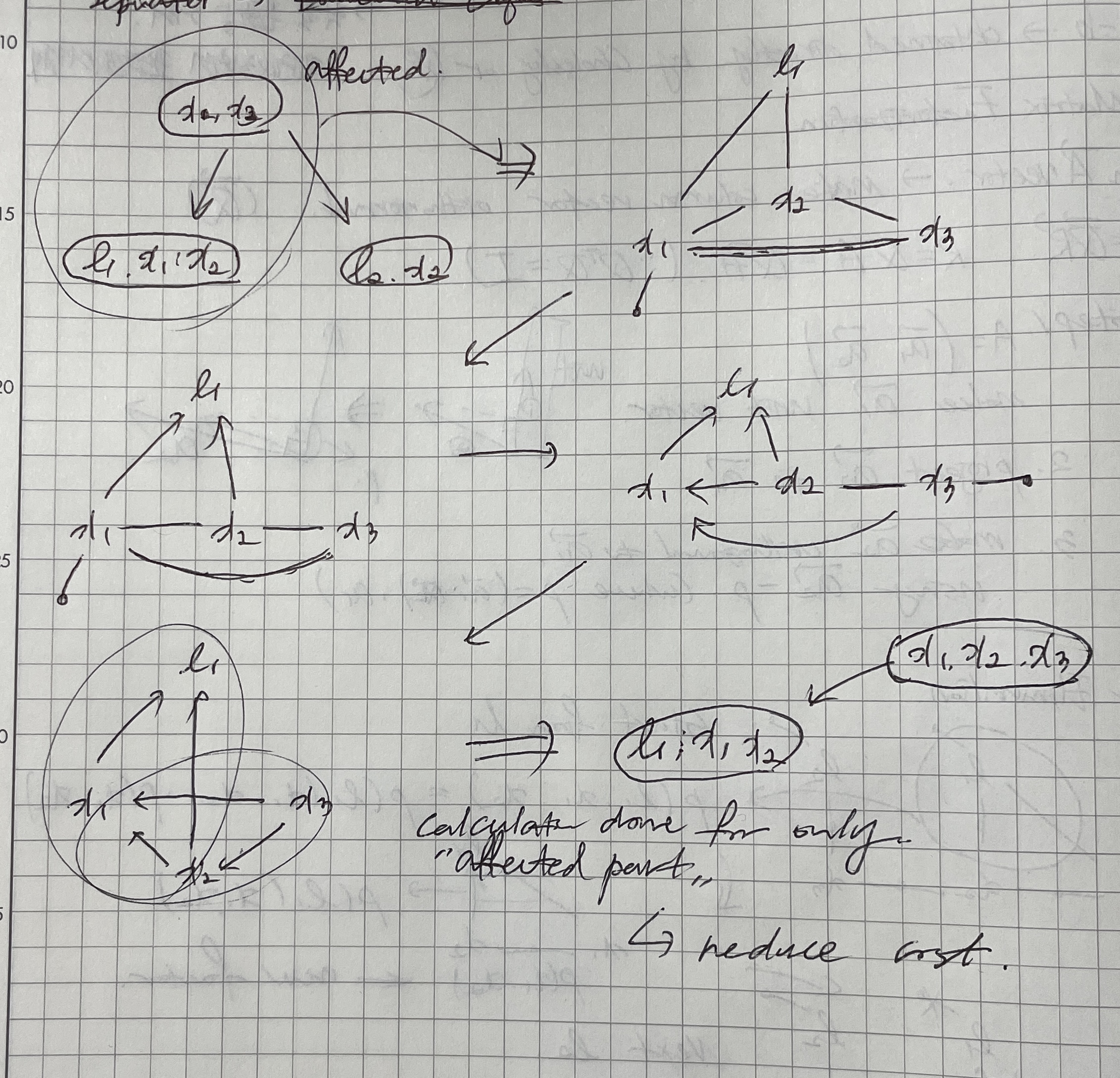
Incremental Inference
- incremental inference는 간단한 트리 수정으로 가능
- 영향을 받는 clique와 root사이의 경로만 영향을 받음 (clique to root , root to clique)
- new factor가 추가되므로, 다시 eliminating process를 거침
- 사진 이해 잘 안됨
Incremental Variable Ordering
- variable ordering은 sparse matrix solution에 필수적
- square root information matrix의 추가 항목인 fill in 최소화를 위해 optimal order가 추구됨
- chordal 상황 제외 fill in은 불가피함
- NP-hard, COLAMD등을 통해 optimal한 순서 찾기 가능
- incremental inference 시에, 각 update 마다 variable update가능
- iSAM에서 사용한 periodic batch reordering 불필요
- bayes tree에서 partial variable reordering을 수행
- globally optimal하지는 않지만 locally optimal한 값을 제공
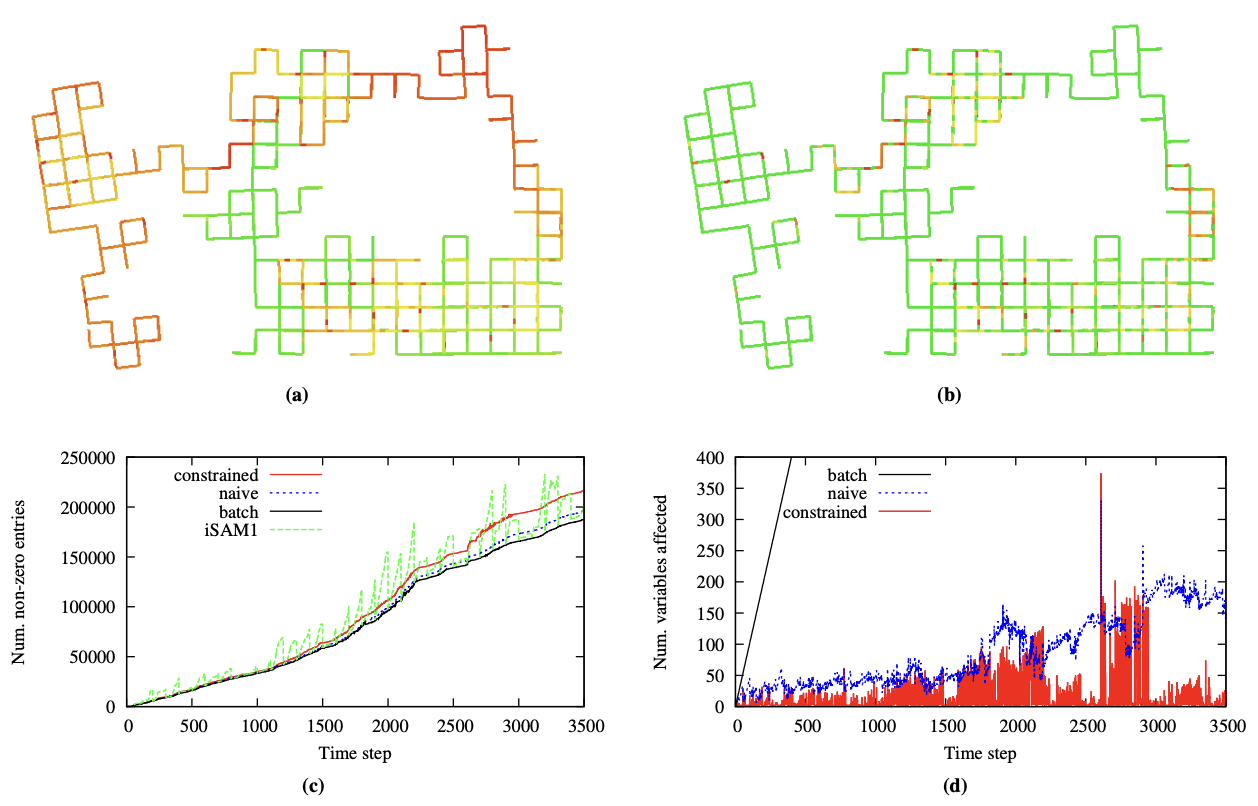
- tree 구조가 가지는 장점에 대한 예시
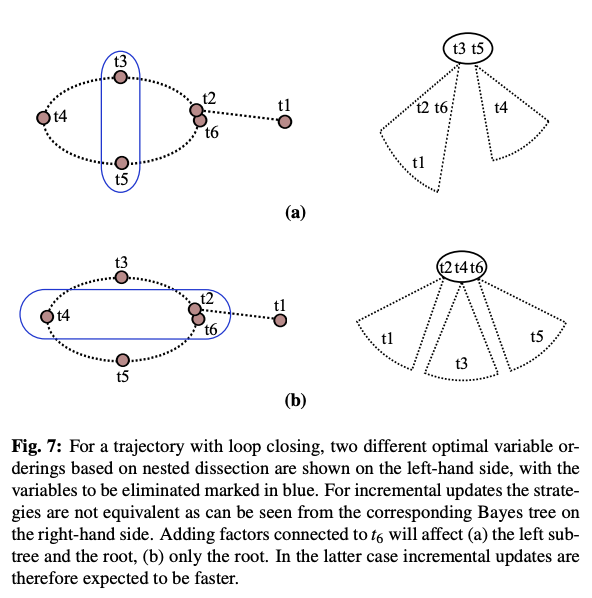
- measurement를 통합하는데 발생하는 비용은 root에 가까워 질수록 작아짐
- COLAMD와 같은 휴리스틱을 locally 사용하면 현재단계의 fill in만을 고려하는 한계 존재
- 가장 최근 접근한 variable을 끝 순서로 배치하는 incremental ordering 제안
- incremental ordering
- constrained COLAMD 사용, most recent variable을 강제로 끝 순서에 배치하면서도 globally 준수한 order를 유지
- 이후 업데이트 시에 영향을 받는 부분을 작게 유지할 수 있는 방법
- 다만 큰 loop closing 발생시 예외적으로 비용이 큼
- batch보다 나음 - 당연하지 않나
- 특정 구간에서 급격한 fill in의 증가 - 아마도 loop closing 때문The iSAM2 Algorithm
- non-linear factor 처리 → 기존의 bayes tree는 linear만 다룸
- fluid re-linearization → 필요한 부분만 partially linearization수행 cost를 줄이고 효율성을 향상
- partial state update → 실제 변화가 있는 factor들에 대해서만 update 수행
Fluid Relinearization
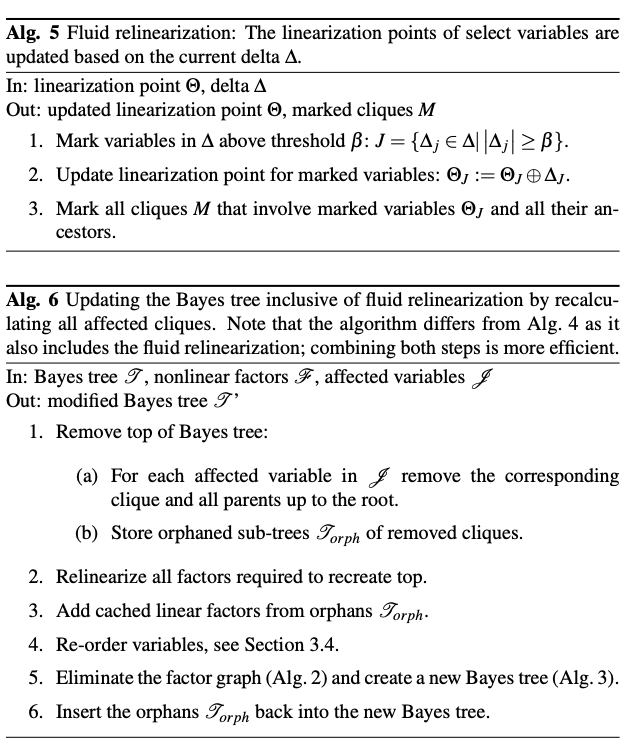
- linearization 필요성 판단
- 현재 추정값이 linearization point를 벗어날 경우
- 임계값 이상의 변화가 발생할 경우
- bayes tree 의 부분적 수정
- linearization을 수행하는 변수와 관련된 정보만 제거하여 partial relinearization 수행
- marginal factor 계산
- relinearization 과정에서 발생한 eliminated sub-tree 정보를 상위단으로 전달
- caching시에 tree의 중간에서 부터 다시 계산도 가능
Partial State Update
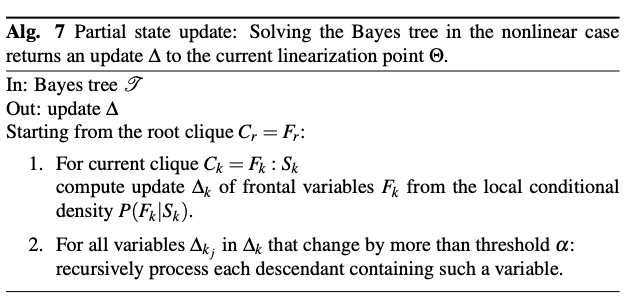
- update partially, 변경된 변수만 계산 → computational cost 감소
- top tree만 변경되므로 sub-tree로는 제한적으로 propagate
- 특정 clique의 variable의 변화량이 임계치 이하면 업데이트 중지
- 해당 clique의 sub tree variable의 변경이 없음이 보장됨
- nearly exact solution 유지 가능
Algorithm and Complexity
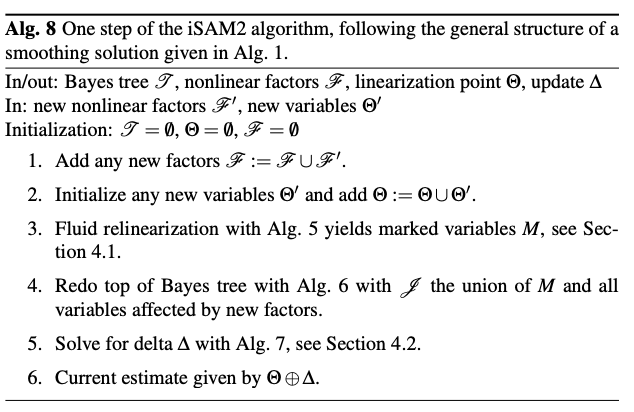
- algorithm
- 변수 집합 추정
- incremental non-linear factor 고려
- 새로운 factor, variable이 계속 추가돔
- bayes tree 활용 최적화 수행
- 선형화 시스템 반복적 해결 방식
- complexity
- general case
- gauss-newton 방식 사용
- 최소점 근처에서 quadratic convergence
- exploration task
- 각 pose마다 constrain 존재
- 영향을 받는 factor가 상수개 →
- loop closure
- general case → full factorization 필요 →
- under certain assumption → backsubstitution →
- emperical complexity
- 이론적 상한보다 훨씬 낮음
- 매 단계에서 대부분 partially compute/refactorization수행하므로 대부분의 경우 효율적 계산
- general case

Studying