Study
1.[논문스터디] ORB-SLAM: a Versatile and Accurate Monocular SLAM System
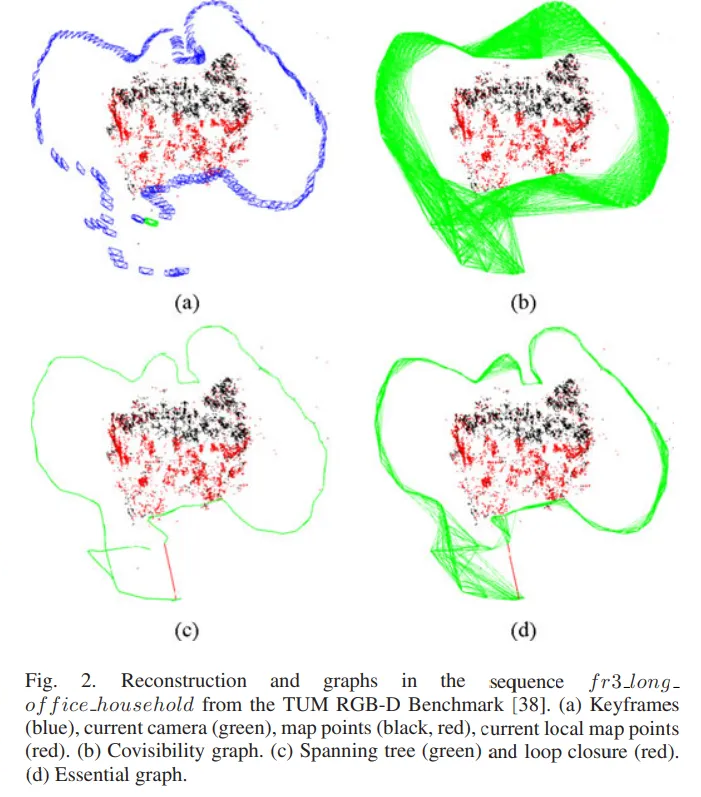
모노 슬램 논문 정리
2025년 2월 15일
2.[논문스터디] SuMa++: Efficient LiDAR-based Semantic SLAM
라이다 세맨틱 슬램 논문 정리
2025년 2월 15일
3.[논문 스터디] iSAM2: Incremental Smoothing and Mapping Using the Bayes Tree
계속 레퍼런스로 달려서 궁금해서 읽어본 슬램 백엔드 논문 정리. 확실히 재미있긴 했다
2025년 3월 18일
4.[논문스터디] KPConv: Flexible and Deformable Convolution for Point Clouds

포인트 클라우드 컨볼루션 커널관련 논문 정리. 논문의 시각 자료의 정석느낌
2025년 3월 18일
5.[논문스터디] LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
라이다 이너셜 오도메트리 논문 정리. 금방 이해돼서 무난히 읽었는데 LIO 논문은 더 봐야할것같음
2025년 3월 18일
6.[논문스터디] Semantic Graph Based Place Recognition for 3D Point Clouds
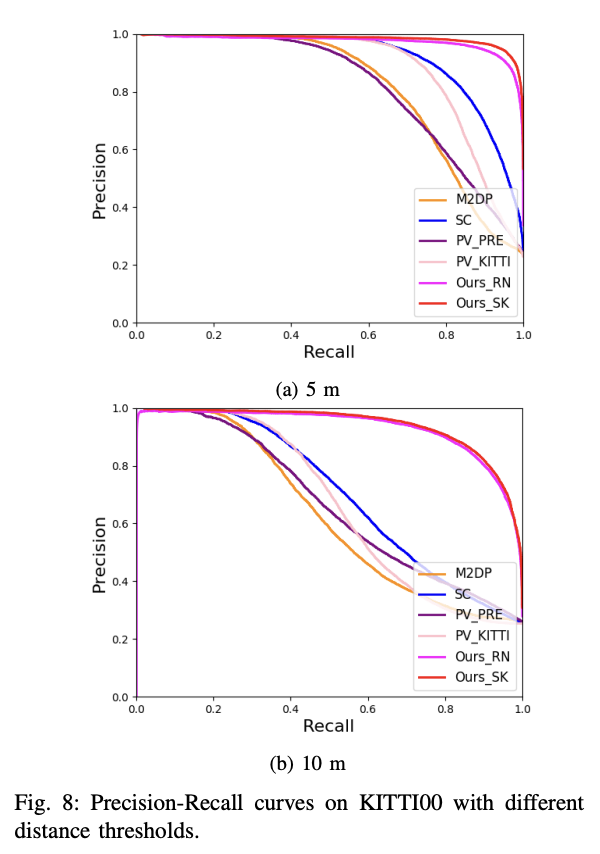
3d 포인트 클라우드에서 Occulsion 및 viewpoint변화, place recognition에 강인한 descriptortor를 생성하는것이 어려움대부분 로컬 아니면 글로벌 아니면 통계적 특징을 사용함이 페이퍼에서는 human perspective에 ㄱㅣ반해서
2025년 5월 1일
7.[논문스터디] PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
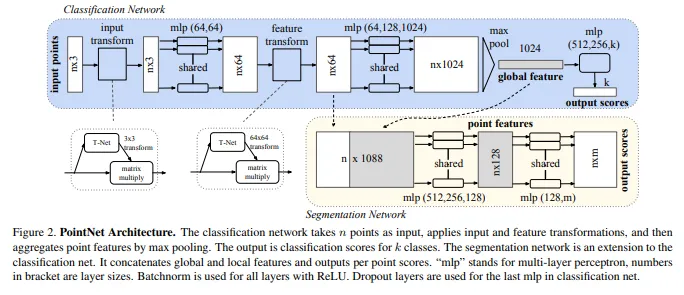
Point cloud는 irregular한 geometric data라서 보통 3D voxel grid나 collection of image로 변환해서 사용함이거 불필요하게 voluminous함 그래서 여기서는 directly point를 다루는 neural netwo
2025년 5월 1일
8.[논문스터디] PointNet++: Deep hierarchical feature learning on point sets in a metric space
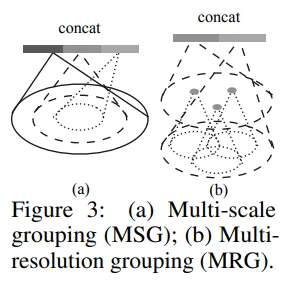
local feature를 PointNet에 추가해보자multi scale로 학습해서 잘 combine해서 결과는 똑같이 내면서 local feature도 utilise해보자PointNet에서는 local structure를 잘 capture하지 못함근데 local s
2025년 5월 1일