ROS에서 node 통신
통신 프로토콜 (TCP/IP 계열)
- XMLRPC 프로토콜 :
nodemaster - TCPROS 프로토콜 :
nodenode
하나의 장치 안에서 여러 노드가 서로 통신
서로 다른 하드웨어 사이에서 네트워크 통신
단일 하드웨어 안에 있는 노드끼리도 네트워크 통신
원격 통신 예제 구동
| Publisher | Subscriber | |
|---|---|---|
| program | turtle_teleop_key | turtlesim_node |
| node | /teleop_turtle | /turtlesim |
| topic | /turtle1/cmd_vel | /turtle1/cmd_vel |
| dtype | geometry_msgs/Twist | geometry_msgs/Twist |
| ip | http://192.168.x.xx | http://192.168.x.xx |
원격 통신을 위한 환경설정
IP 주소 설정
ROS_MASTER_URI=로봇 IP 주소
ROS_HOSTNAME=내 PC IP 주소
sudo gedit ~/.bashrc
export ROS_MASTER_URI=http://192.168.x.xx:11311
export ROS_HOSTNAME=192.168.x.xxsource ~/.bashrc
구동
rosrun turtlesim turtle_teleop_key
노드간 메시지 확인
rostopic list
rosnode info /turtlesim
rostopic echo /turtle1/cmd_vel
rqt_graph
원격 통신 환경 구축
사설 IP를 가진 여러 장치를 port forwarding을 이용해 연결
| PC | 공유기 |
|---|---|
사설 IP192.168.x.xx | 공인 IP 전세계에서 유일한 값 |
| OS ROS Version 사설 ip hostname | pc에 DMZ 설정 공인 ip |
네트워크 환경설정 작업순서 및 흐름
- 공유기 포트 포워드 설정
포트 범위 1024~65000
DMZ 설정할 때 ROS 원격통신을 시도할 장치의 IP를 입력
DMZ : 공유기의 모든 포트를 특정 사설 IP에 포트포워딩하는 것 /etc/hosts파일 수정
PC
PC 사설 IPlocal
로봇 공인 IP로봇 hostname
로봇
로봇 사설 IPlocal
PC 공인 IPPC hostname- ROS 환경변수 설정
roscore는 ros 네트워크에서 반드시 하나만 실행되어야 함
ROS Master 접근을 위해 로봇 공인 IP주소 필요
~/.bashrc에ROS_HOSTNAME주석 처리(이미/etc/hosts파일에서 수정)
ROS_MASTER_URI에 로봇 공인 IP 입력
로봇(roscore 가동)은ROS_MASTER_URI에 본인 사설 IP 입력 - 실행 테스트
Publisher :rostopic pub /chatter std_msgs/String hello
Subscriber :rostopic echo /chatter
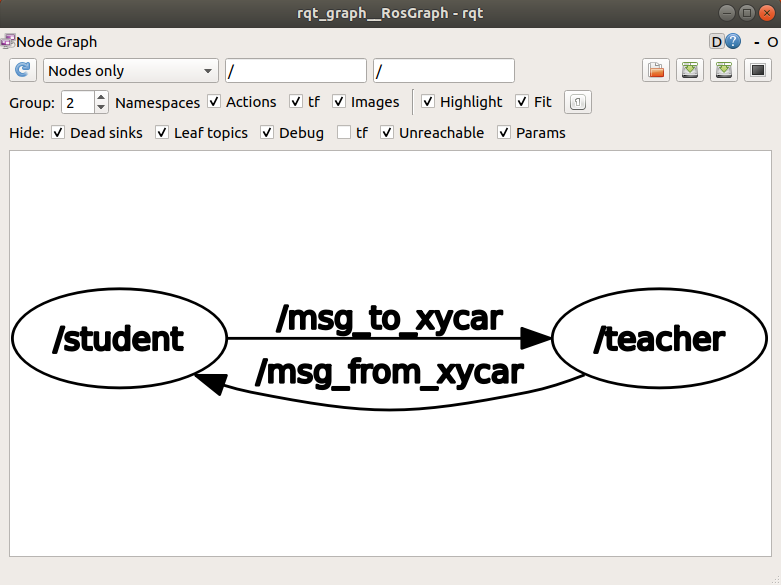
노드간 원격 통신 구성
xycar_ws
├ src
│ └ msg_send
│ ├ src
│ │ ├ remote_teacher.py
│ │ └ remote_student.py
│ └ launch
│ └ remote.launch
├ build
└ develmsg_receiver.py msg_sender.py 참고
로봇
roscore
rosrun msg_send remote_teacher.py
msg.first_name = "bert"
msg.last_name = "shim"
msg.id_number = 201914113
msg.phone_number = "010-0000-0000"PC
rosrun msg_send remote_student.py
launch
roslaunch msg_send remote_launch