모터제어기
xycar_ws
├ src
│ └ my_motor
│ ├ src
│ ├ └ 8_drive.py
│ ├ launch
│ └ └ 8_drive.launch
├ build
└ devel자이카 조향장치가 좌우로 꺾이며 8자 주행

3D자동차 제어프로그래밍
xycar_ws
├ src
│ └ rviz_xycar
│ ├ src
│ │ └ move_joint.py
│ ├ launch
│ │ ├ xycar_3d.launch
│ │ └ move_joint.launch
│ ├ urdf
│ │ └ xycar_3d.urdf
│ └ rviz
│ └ xycar_3d.rviz
├ build
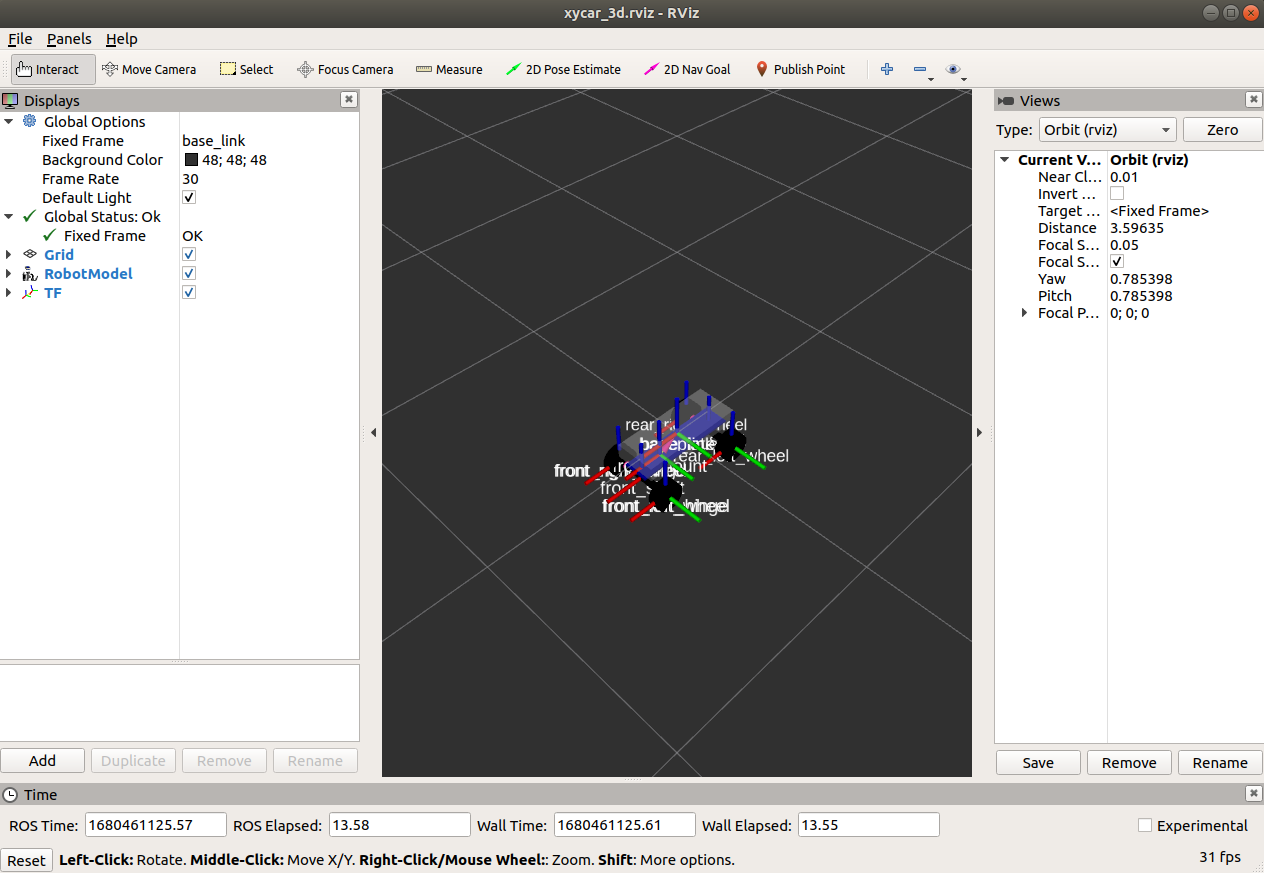
└ develRVIZ xycar_3d
roslaunch rviz_xycar xycar_3d.launch
문제
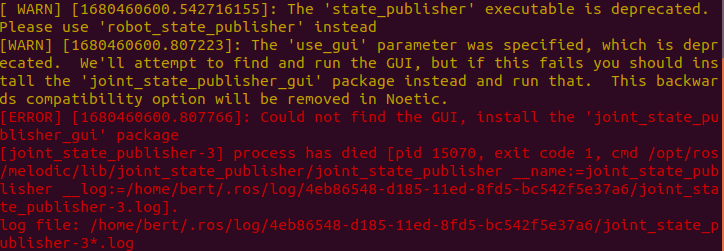
sudo apt install -y ros-$(rosversion -d)-joint-state-publisher-gui
rviz
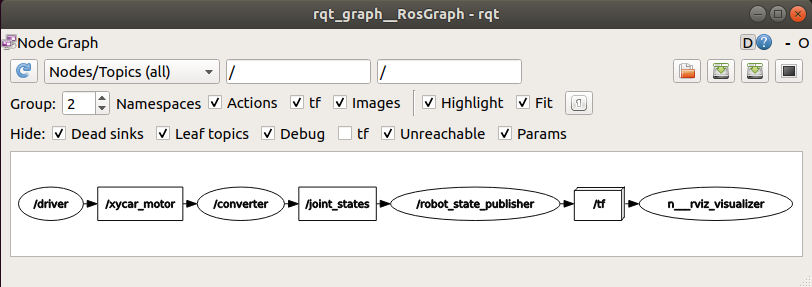
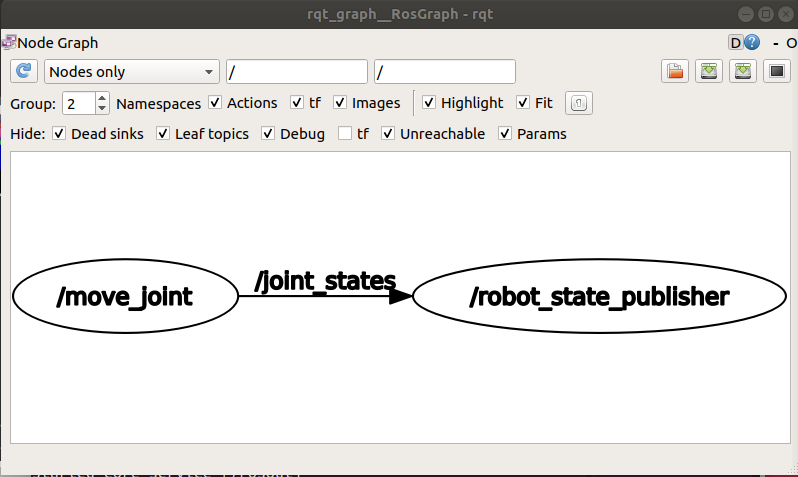
rqt_graph
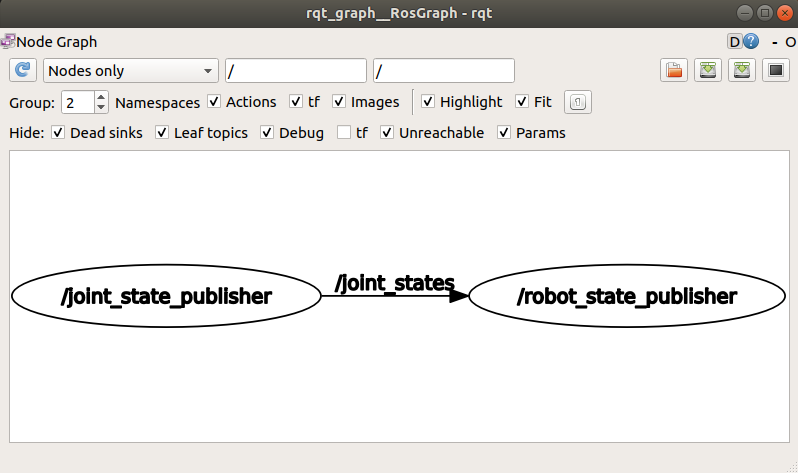
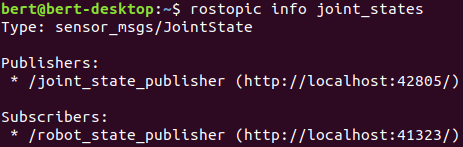
/joint_states topic 확인
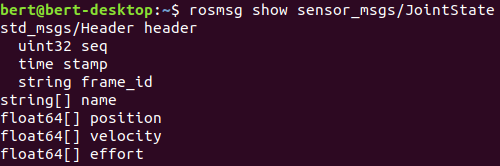
topic의 message 확인
바퀴 회전
roslaunch rviz_xycar move_joint.launch


move_joint.launch 수정

RVIZ에서 3D 자동차 8자 주행 휠 제어
xycar_ws
├ src
│ └ rviz_xycar
│ ├ src
│ │ ├ converter.py
│ │ └ rviz_8_drive.py
│ ├ launch
│ │ └ rviz_drive.launch
│ ├ urdf
│ └ rviz
│ └ rviz_drive.rviz
├ build
└ develconverter.py
topic : xycar_motor joint_states
| xycar_motor | joint_states |
|---|---|
| xycar_motor/xycar_motor | sensor_msgs/JointState |
| Header header int32 angle int32 speed | Header header string[ ] name float64[ ] position float64[ ] velocity float64[ ] effort |
roslaunch rviz_xycar rviz_drive.launch