rospack list | 패키지 확인 |
rospack find [pkg_name] | 패키지 검색 |
roscd [dir] | ROS 패키지 디렉터리 이동 |
rosls [dir] | Linux ls와 유사 |
rosed [file_name] | 에디터로 파일 편집 |
패키지 새로 만들기
xycar_ws
├ src
│ └ my_pkg
│ ├ src
│ │ ├ pub.py
│ │ └ sub.py
│ ├ CMakeList.txt
│ └ package.xml
├ build
└ devel- 패키지 만들 위치 이동
cd ~/xycar_ws/src - 패키지 생성
catkin_create_pkg [my_pkg] [msg] [msg]
[msg]패키지가 의존할 다른 패키지

패키지 빌드
cd ~/path/xycar_ws && catking_make
패키지 확인
위치 확인
rospack find my_pkg

의존성 확인
rospack depends1 my_pkg

이동
roscd my_pkg
publisher 생성 후 작동
roscore
rosrun turtlesim turtlesim_node
rosrun my_pkg1 pub.py
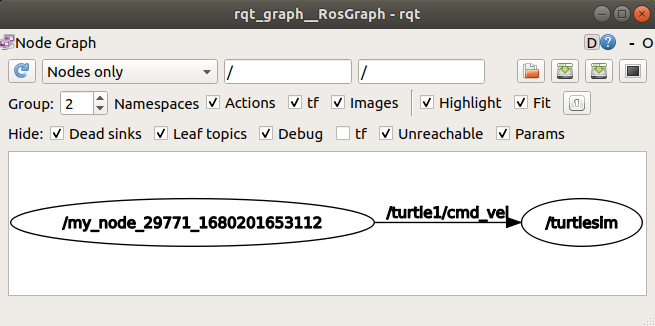
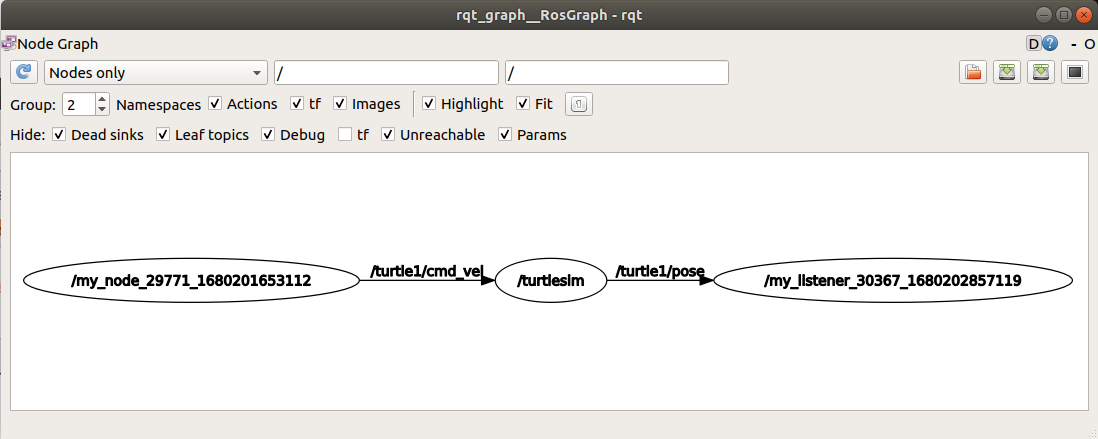
rqt_graph
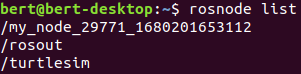
rosnode list
subscriber 생성 후 작동
rosnode list
node 확인rostopic list
topic 확인
각 topic은 type 가짐rostopic type /turtle1/pose
type 확인
각 type은 message 가짐rosmsg show turtlesim/Pose
message 확인
rosrun my_pkg1 sub.py

rqt_graph
roslaunch
xycar_ws
├ src
│ └ my_pkg
│ ├ src
│ │ ├ pub.py
│ │ └ sub.py
│ ├ launch
│ │ └ pub-sub.launch
│ ├ CMakeList.txt
│ └ package.xml
├ build
└ devel여러 노드들을 한꺼번에 실행 가능
실행할 launch file은 package 내부에 있어야 함
roslaunch [pkg] [launch file name]
roslaunch my_pkg1 pub-sub.launch
roscore 자동 실행됨
Tag : node
실행할 노드 정보 입력 시 사용되는 태그
pkg실행시킬 노드 패키지 이름type파이썬 파일명name노드 이름
소스코드에서 지정한 노드 이름 무시, launch 파일 기록된 노드 이름으로 노드 실행
Tag : include
다른 launch 파일을 불러오고 싶을 때 사용되는 태그
file함께 실행할 .launch 파일 경로
Tag : param
name변수 이름
private param 앞에는~붙일 것type변수 타입(str, int, double, bool, yaml)value변수 값
circle_size=1
circle_size=4