ubuntu 18.04 설치
http://mirror.kakao.com/ubuntu-releases/
https://old-releases.ubuntu.com/releases/
업그레이드하지 않음
업데이트
설정
자동으로 업데이트 확인 : 하지않기
보안 업데이트가 있을 때 : 즉시 표시
기타 업데이트가 있을 때 : 매주 표시
새 우분투 버전 알려주기 : 하지 않기
ros melodic 설치
http://wiki.ros.org/melodic/Installation/Ubuntu


ros 기초 실습
워크스페이스 생성
mkdir -p ~/xycar_ws/src
cd xycar_ws
catkin_make
catkin_make빌드 작업 진행- 소스코드는
/src안에 넣으면 됨

.bashrc 수정
alias eb='sudo vim ~/.bashrc'
alias sb='source ~/.bashrc'
alias cm='cd ~/xycar_ws && catkin_make'
source /opt/ros/melodic/setup.bash
source ~/xycar_ws/devel/setup.bash
export ROS_MASTER_URI=http://localhost:11311
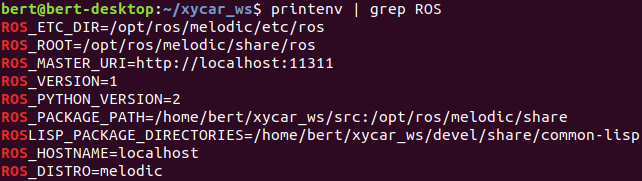
export ROS_HOSTNAME=localhost작업환경 확인
ros 예제 프로그램 구동 실습
노드1(turtle_teleop_key)에서 노드2(turtlesim_node)로 토픽(/turtle1/cmd_vel) 전송
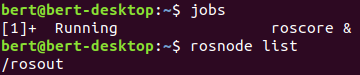
roscore 실행
roscore &
확인
turtlesim_node 실행
rosrun turtlesim turtlesim_node
토픽을 받아서 거북이 이동
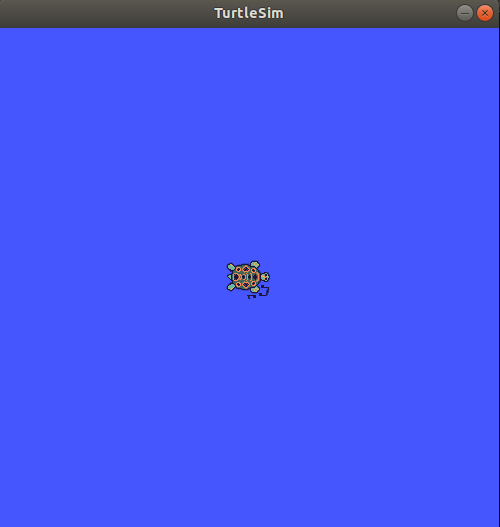
확인

turtle_teleop_key 실행
rosrun turtlesim turtle_teleop_key
사용자 입력에 맞춰 토픽 발행

확인

rosnode rostopic 실행
rostopic list
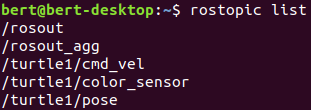

/turtle1/cmd_vel이라는 토픽이 geometry_msgs/Twist라는 메시지를 담음
publisher는 1개임
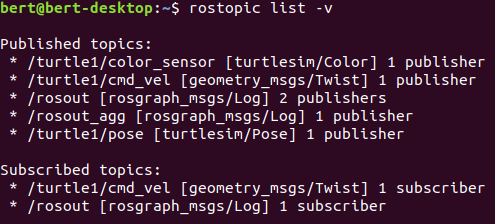
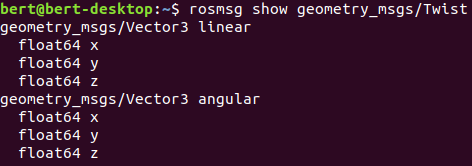
/turtle1/cmd_vel 토픽에 발행되는 메시지 타입 : geometry_msgs/Twist

geometry_msgs/Twist의 메시지 구성
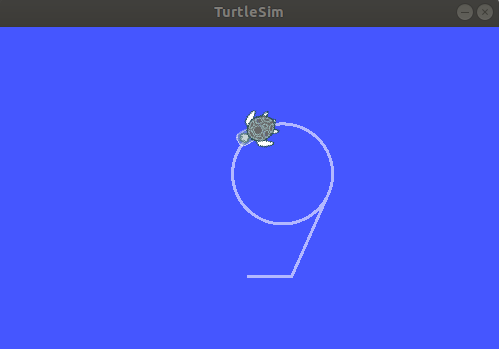
토픽 발행
-1 일회성 발행
-r 1 1초에 한 번씩
/turtle1/cmd_vel 토픽
geometry_msgs/Twist 메시지 타입
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
rqt_graph

