[논문 리뷰] Vulnerability-Aware Spatio-Temporal Learning for Generalizable Deepfake Video Detection
1. Introduction
- 기존의 방법 : spatial artifact에 집중 → frame level의 위조에서는 괜찮아도, vedio level에서는 효과가 적음 (spatial + temporal forgery pattern)
- 새로운 방법 : spatial 분기와 temporal 분기로 나눔 → 일반화 능력이 향상됨 → 아래에서 확인하기
- 모델의 최종 결정을 binary classifier 가 전담하는 것은 implicit meaning을 사라지게 함
- regresion temporal branch
- 특정 지점 - vunerability patch/point == embedding artifacts - 에 집중하는 것이 성능 향상에 도움
- spatial branch
- spatial 과 temporal domain 간 balance
- frame-wise temporal spatial artifact 감지
- hand-free ground truth
- 위의 개념을 구현하기 위해 SBV 모듈 설계
- 해당 모듈은 HQ 비디오 수준 데이터 합성 알고리즘
- TimeSformer 의 개조
- 기존 TimeSformer의 경우 temporal, spatial token을 분리함
- 이 분리한 token을 어떻게 사용하느냐가 논문의 contribution
2. Related Work
1. Video-based Deepfake Detection
- temporal token 과 spatial token 을 같이 봐야 한다.
- 멀리 떨어진 temporal token도 잘 연결돼야 한다.
- 단순 binary classification 만으로는 generalization에 한계가 있다.
2. Data Synthesis
- STC 에서 pseudo-fake를 생성
3. Method
- 가 i번째 vedio
- 가 i번째 vedio에 대응하는 T, F label
- 에 속하는 data 에만 의존함
- 은 을 위조한 pseudo-fake data
1. Video-Level Data Synthesis and Augmentation
Self-Blended Video
- 기존의 blending synthesis를 video level에도 확장함
- blending synthesis 가 유효한 전략인가?
의문 1. 실제 deepfake detection dataset에서는 fake가 real 보다 훨씬 많다.
- 논문은, 실제 존재하는 data 분포를 모방하는 것이 아니고, 그럴싸해 보이는 fake 들을 만들어 내면 됨
의문 2. Real-Real blending에서 overfitting?
- 기존 GAN based model 은 위조 흔적이 남는 경우가 다수
- 반면 blending의 경우 mask 위치, noise 강도, 위조 대상이 Random 이므로 통계적으로 랜덤함.
- 또한, spatial artifact가 제거되어 있음
- 논문에서는 구조적으로 spatial artifact를 보지 못하게 하려고 kernel size를 1로 둠.
결론. 결국 data synthesis가 효과가 있는 이유
- blending data와 1x1 kernel 조합에서 모델이 볼 수 있는 것
- identity consistency 붕괴 : 눈, 코, 입 간의 어색함
- semantic inconsistency : 눈, 코, 입의 근육 움직임이 얼굴 전체의 감정 표현과 맞지 않음
- channel-wise distribution shift : RGB 혹은 채널 별 통계(mean, variance, color tone 등)가 real 데이터와 미묘하게 다름.
- Frequency statistics mismatch : 고주파, 저주파 에너지 분포가 다름.
- Global Coherence : 하나의 이미지 안에서 미묘하게 달라지는 조명, 혹은 얼굴의 각도
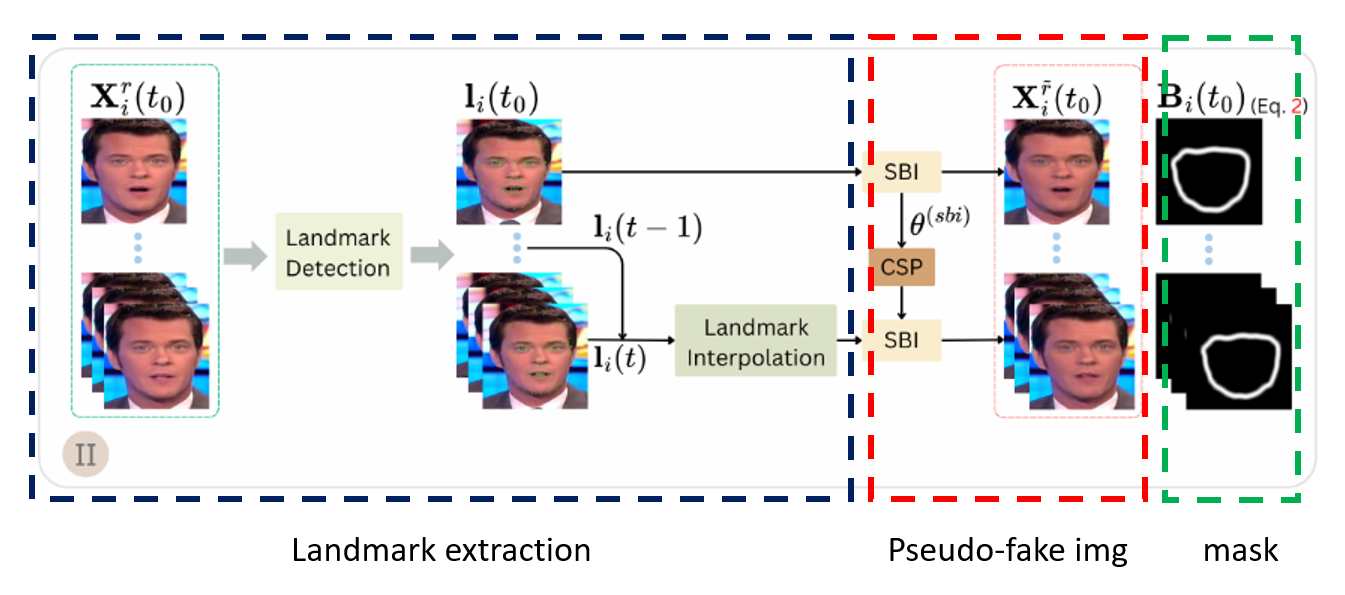
SBV(Self-balanced Video)
1. CSP (consistent synthesized parameters)
- real 비디오의 첫 번째 프레임을 기준으로 랜드마크 점들을 계산한다.
- 그 다음 SBI를 적용해서 pseudo-fake image와 blending mask를 만들고 그것과 관련된 파라미터들을 저장한다. ← 이러면 computing cost가 증가하지 않나..?
- SBI 를 거치면 local artifact가 있을 것으로 예상되는 지점에 대해 마스크가 생성되는 것임
- 이 마스크는 local artifact를 smoothing함.
- 하지만, SBI만을 사용하면 temporal forgery에는 대비할 수 없음 → 이를 위해 interpolation method 제안
- SBI paper 한 번 쯤 읽어볼 필요가 있음
2. LI (Landmark Inaterpolation module)
- 여기서 는 어떻게 선택하는 건지 코드상으로 확인 필요
- 도 얼마인지 코드상으로 확인이 필요
- 이렇게 추출된 마스크에
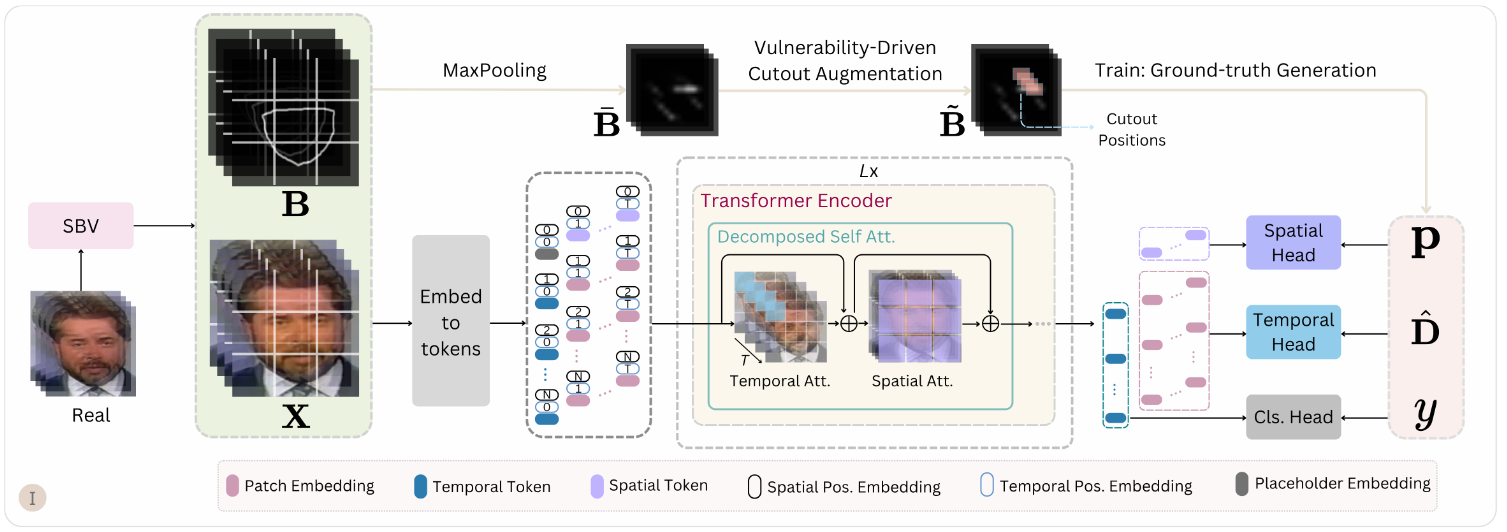
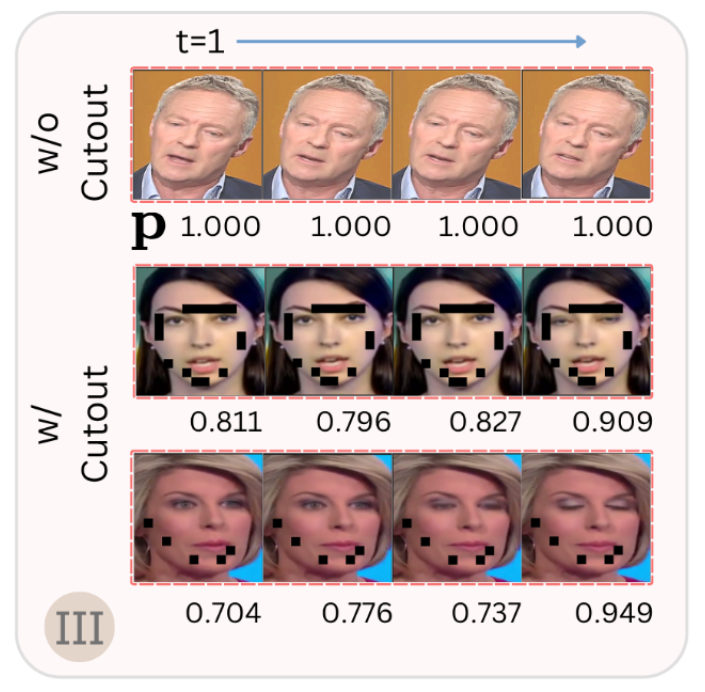
Vulnerability-Driven Cutout Augmentation
- local artifact에 overfitting 되는 것을 방지하는 data augmentation 과정
- local artifact를 masking 후 training
- 아래 과정은 pseudo-fake image가 만들어 지는 과정
에서 가 되는 과정
- 여기서 를 하면 마스크 외부와 내부가 맞닿는 경계에서만 값이 생긴다.
- *4 를 한 것은 scaling효과를 준다.
- 그 결과 픽셀 레벨에서 경계선에만 1, 나머지는 0에 가까운 값이 주어진다.
- 픽셀레벨에서 부여된 값을 maxpooling 한다.
- 위에서 구한 패치를 가지고 임계 이상인 값을 갖는 패치를 마스킹 후보로 정한다.
- 위 과정 전부 코드에서 찾아볼 부분 + N값은 어떻게 정하는지
2. FakeSTomer
- temporal artifact를 포착하도록 모델을 설계하자 - 시간 헤드 h, 공간 헤드 g의 도입
- temporal head (h) : blending boundary의 gradiant를 가지고 temporal artifact 탐지
- spatial head (g) : 각 frame 내에서 spatial intensity(artifact) 탐지
1. Backbone : Revisited TimsSformer
- 여기서 가 vedio input이고 가 embedding matrix
- 원래 TimeSformer는 가 모든 patch를 사용하여 classification에 이용됨
- 그러나 이 token은 spatial info와 temporal info를 동시에 본다는 한계가 있음
- 이를 해결하기 위해 를 도입하고 이 matrix는 temporal token 와 spatial token 합쳐 놓음
- 그리고 과 은 각각 self-attention을 수행함
- tranfomer 에서 설정한 헤드 개수, 패치 개수 코드상으로 확인
- 이를 한 줄의 수식으로 표현하면 다음과 같다.
2. Temporal Haed
- Temporal artifact - temporal high-change - 를 찾자
- 를 만든 것과 마찬가지로 아래 D를 만든다.
- gradient를 update하는 데 사용한 normalization이 무엇인지 코드상으로 확인이 필요
- 해당 gradient를 구하기 위해 regression matrix head를 고안해야 한다.
- Head 는 다음과 같다. 또한 F는 Head에 들어가는 정보이다.
- 는 normalized D 이다.
- 그 다음 batch norm과 GELU를 거치고 아래 Loss function을 통과한다.
- 여기서 새로운 loss function을 만들어 봐도 좋을듯?
3. Spatial Head
- soft label을 사용하도록 한다. → 아마 이 부분에서 overfitting이 더 심한 듯
- pseudo-fake vedio에서 Blending boundary 를 생성
1. ground truth label 생성
- 프레임 안의 모든 spatial patch를 훑고, blending boundary 중 가장 큰 값 하나를 뽑는다.
- 프레임 안에 blending boundary가 하나라고 있으면 pseudo-fake 영상으로 간주함
- 만약 blending boundary가 하나도 없다면 0이 됨
- max값을 줘서, blending boundary가 있냐, 없냐를 민감하게 파악함
- 조금이라도 위치상으로 가짜일 확률이 있는 프레임을 모두 찾아낸다!
2. Architecture Design
3. Objective function
4. Training Objective
- 여기서 말하는 는 dataset에서 제공되는 gt label이다.
3. 정리
- 학습 단계에서는 real-real blending vedion
- test 단계에서는 전체 Deepfake dataset 사용

이것저것 다 합니다.