행렬
수를 행과 열에 맞춰 배열
=> 선형 변환의 표현
행과 열의 수가 같은 행렬 : 정방 행렬
행렬은 결합, 분배 법칙을 만족하지만 교환 법칙을 만족하지 않음
행렬 곱의 전치 연산
(A⋅B)T=AT⋅BT
선형 변환과 행렬
정방 행렬 M = [acbd]
열벡터 v = [xy]
M ⋅ v = [ax+bycx+dy]
=>
f(x, y) = (ax + by, cx + dy)
정방 행렬은 같은 차원의 공간이 서로 대응되는 선형 변환을 의미
열벡터는 벡터 공간의 벡터를 의미
열기반 행렬 (Column major matrix)
OpenGL, 수학에서 사용하는 기본 방식
행기반 행렬 (Row major matrix)
DirectX 및 게임 엔진에서 사용하는 방식
[xy]⋅[acbd]=[ax+bycx+dy]
열기반과 행기반은 전치 관계일 뿐 결과는 동일
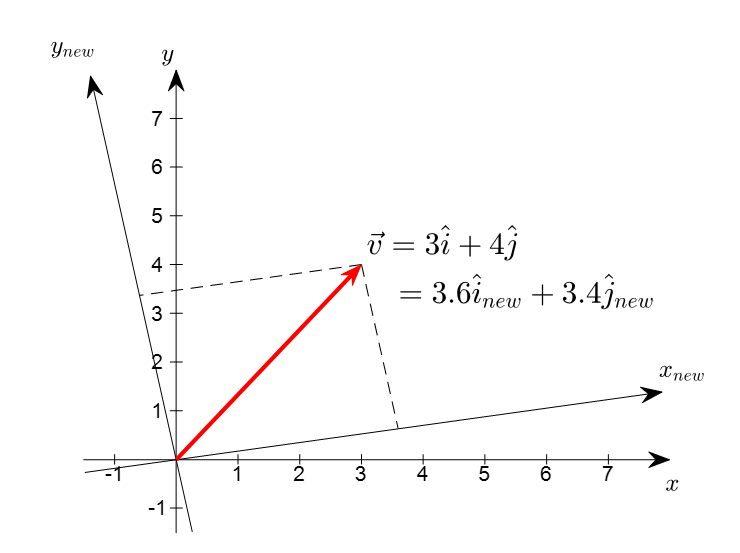
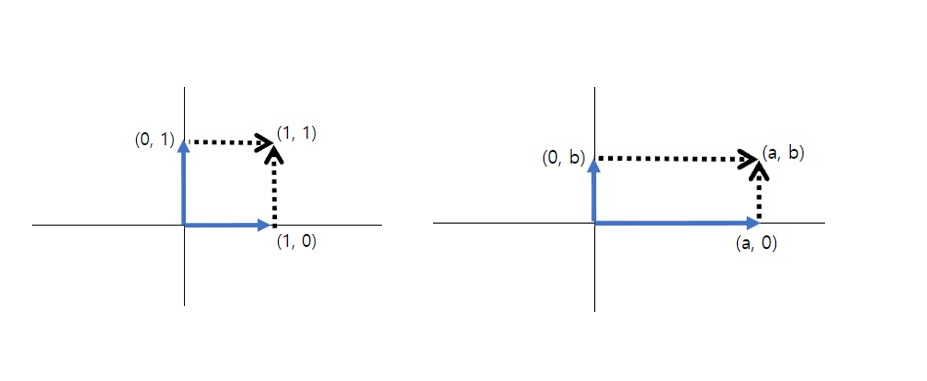
원 벡터 공간의 선형 변환
(x, y) = x(1, 0) + y(0, 1)
=> ×[acbd]
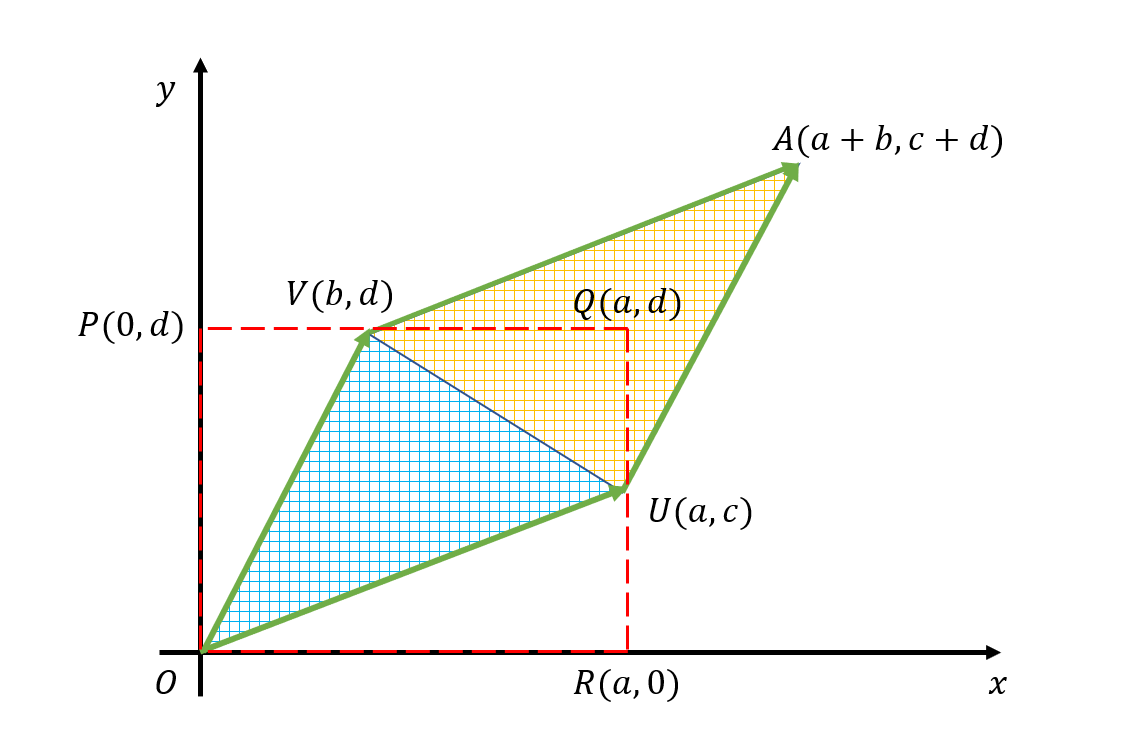
x(a, c) + y(b, d) = (a + b, c+ d)
이미지 출처
선형 변환된 첫번째 표준 기저 벡터 e1 = (a, c)
선형 변환된 두번째 표준 기저 벡터 d2 = (b, d)
[(ac)(cd)]
크기 변환
×[a00b]
밀기 변환
×[10a1]
90도 회전(시계)
×[0−110]
90도 회전(반시계)
×[01−10]
임의의 각도 θ만큼 회전
×[cosθsinθ−sinθcosθ]
행렬의 곱
두 행렬을 곱한 식 (A⋅B)는 벡터 공간 V에서 벡터 공간 W로 직행하는 합성 변환을 의미하며, 함수 A∘B와 동일하다.
삼각함수 합의 공식을 회전 행렬 2개의 곱으로 유도할 수 있음
(a각 회전 + b각 회전은 (a+b)각 회전으로 나타낼 수 있음)
주로 사용하는 선형 변환은 5가지이다
Scale(S), Ratoation(R), Translation(T), View(V), Projection(P)
변환이 고정되어 있다면 PVTRS를 미리 계산해두고 새로 들어오는 벡터와 곱해주기만 하면 된다.