Markov Decision Processes(MDP)
- MDP는 강화학습에서 환경을 설명한다. 환경은 fully observable하고, 대부분의 RL problems는 MDP로 표현할 수 있다. optimal control(최상의 정책 만들기)은 MDP로 제어하고, Partially observable problems도 MDP로 변환할 수 있다.
Markov Property
- "현재가 주어진 상황에서, 미래는 과거와 무관하다"
- 각 상황은 해당 상황의 history의 관련 정보를 담고 있다. state 그 자체만으로 과거의 기록들이 내포되어 있는 것이기 때문에 과거의 정보를 따로 사용하지는 않는다.
- A state 는 Markov이다 if and only if
State Transition Matrix
- Markov state s와 successor state(다음에 도달하게 될 상태) s'에서, state transition probability는 다음과 같이 정의된다.
- state transition matrix P에서는 모든 state에서 모든 successor states s'가 발생할 확률을 나타낸다. 각 row를 합치면 1이 된다.
Markov Process
- 기억이 없는 무작위 과정 : 현재 상태가 미래 상태에 대한 모든 중요 정보를 포함하고 있음을 의미함. 즉 미래 상태는 현재 상태에만 의존하며 과거 상태는 중요하지 않음
- Sequence of random states : Mervoc Process에서는 상태가 무작위로 전이된다. 상태들은 시간이 지남에 따라 변화하며, 각 상태의 전이는 특정 확률로 결정된다.
- Markov property : 현재 상태가 미래 상태에 영향을 미치는 유일한 정보로, 과거 상태를 따로 고려하지 않는다.
Example : Student Markov Chain Episode
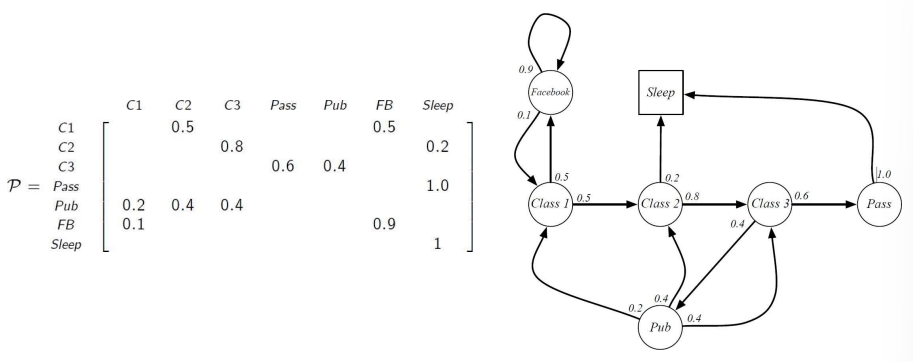
학생이 각 상태에서 다른 상태로 전이될 확률 표는 다음과 같이 표현된다. 각 상태에서 다른 상태로 넘어갈 때, 오직 전이 matrix P를 참조하여(현재 상태만을 참조하여) 다음에 등장할 state가 결정된다.
Markov Reward Process
- Markov chain을 확장한 것으로 , 각 상태 전이에 보상 값이 추가된 형태임.
- Markov Reward Process는 tuple로 정의 :
- 는 state의 유한한 set이다.
- 는 state transition matrix임.
- 은 reward function임:
- 는 discount factor로 0과 1 사이의 값임.
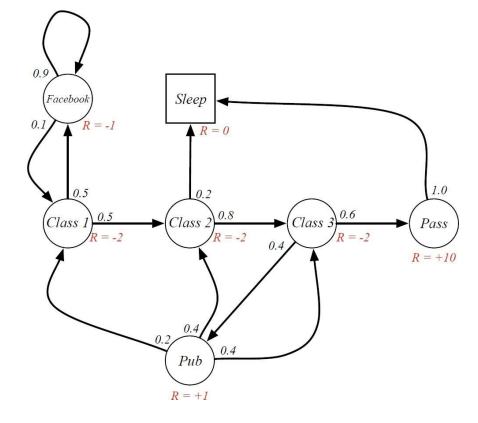
다음과 같이, 다른 상태로 전이될 확률 뿐만 아니라 reward 또한 포함한다.
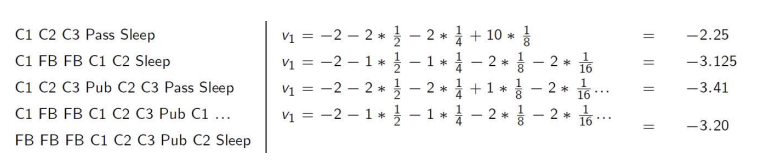
(Discounted) Return
- return 는 time-step 부터의 discount된 reward의 통합이다. 는 일반적인 reward와 달리 시간이 지남에 따라 미래의 reward의 값이 절감되어 돌아온다.
- discount value 는 미래의 보상에 대한 현재의 가치를 뜻한다. 즉 미래의 가치를 얼마나 쳐줄 지!에 대한 value이다.
- 는 미래의(지연된) 보상보다 현재의 보상을 더 높게 쳐준다.
- 가 0에 가까우면 근시안적(myopic)으로 평가함- 가 1에 가까우면 미래지향적(far-sighted)으로 평가함.
Why discount?
- 대부분의 Markov reward와 dicision process는 discount된다. Why?
- 순환적인 Markov process에서 미래의 reward에 대해 discount를 하지 않으면 무한 루프에 빠질 수 있음. 미래의 reward에 대해 discount를 적용해야 이를 방지 가능함.- 미래의 불확실성 : 미래는 불확실하고, 시간이 지남에 따라 불확실성은 점점 더 커짐. 따라서 보다 가까운 미래의 보상을 더 중요하게 평가함.
- 금융 보상의 시간 가치 : 금융 문제의 경우, 자금을 현재 사용하는 것이 미래에 사용하는 것보다 가치가 높음
- 동물과 인간의 즉각적인 보상 선호 : 실험심리학에서 애초에 동물이랑 인간이 즉각적인 보상을 더 선호한다는 결과가 나왓음!
- discount 없는 Markov 보상 과정 사용 가능성 : 모든 에피소드가 종료되어 무한대로 진행되지 않는다는 상황 하에 discount를 1로 설정(즉 discount가 걍 없음)할 수 있음.
Value Function
- value function 는 state s에 대해 long-term value를 출력한다. 즉 discount를 포함한 value를 출력한다.
다음과 같이, 미래의 보상에 대해서 discount가 곱해져 가 정해진다.
Bellman Equation for MRPs
- value function은 두 파트로 쪼개질 수 있음:
- 즉각적인 보상
- succesor state 의 discounted된 value - 다음과 같이 설명할 수도 있음 :
여기서 가 잘 이해가 안됐는데, 이 부분은 state s에서 만약 A, B, C 상태 중 하나로 전이 가능할 때, 를 뜻한다. 여기서 P는 다른 상태로의 전이 확률, V는 해당 상태의 value를 뜻한다.(discount 생략)
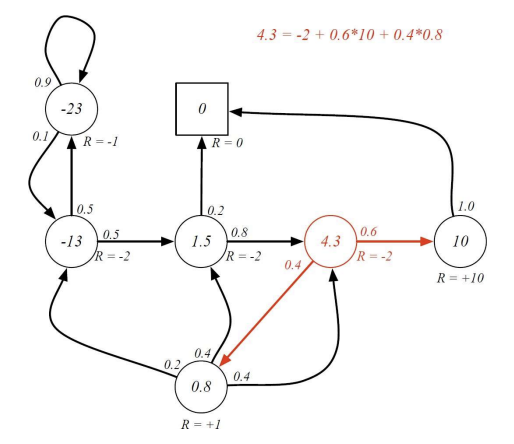
이러한 Bellman Equation에 따라 각 state의 value는 다음과 같이 계산된다.
Bellman Equation in Matrix Form
Bellman Equation은 matrix로 표현할 수도 있다.
Solving the Bellman Equation
Bellman 방정식을 어떻게 푸는지 / state의 value를 어떻게 계산하는지
- Bellman Equation은 선형 방정식이다.
- Direct Solution (직접 해법)
- N state에 대한 계산 복잡도는- 따라서 state가 많아지면 직접 해법을 사용하는 것이 매우 비효율적이거나 불가능하므로, 작은 MRP에만 적합함.
- 큰 MRP에 대한 반복적인 방법
- 위에서 말한 대로, 큰 규모의 MRP에서는 벨만 방정식을 직접 풀기 어려우므로, 반복적 방법을 사용하여 푼다.- Dynamic programming / Monte-Carlo evaluation / Temporal-Difference learning
Markov Decision Process
-
vs MRP : MRP는 state와 reward만을 고려한다. 따로 decision, 즉 action을 내리는 부분이 없고 단순히 상태에서 다른 상태로 전이하면서 보상을 받는다. MDP는 MRP에서 추가적으로 action을 고려하여, 각 상태에서 여러 행동 중 하나를 고름에 따라 상태 전이 확률과 보상이 달라진다.
-
모든 state가 Markov한 상황인 environment임.
-
Markov Decision Process :
- : states의 유한한 set- : actions의 유한한 set
- : 상태 전이 매트릭스
- : reward function
- : discount factor
Policies
- policy 는 주어진 상태에서 어떤 행동을 할지에 대한 확률 분포를 정의한다.
- 즉 현재 상태 s에 있을 때 행동 a를 선택할 확률을 나타냄. agent의 의사결정 규칙.
- MDP 의 policy는 현재 상태에 기반함. (Markov랑 같음. 과거 신경 X)
- Policies는 stationary(시간과 독립적)하다. 시간에 의존하지 않고 항상 동일하게 작동함.
- MDP와 정책의 정의
- MDP는 다음과 같이 정의됨 :- 이 MDP와 함께 주어진 policy는 특정 상태에서 어떤 행동을 선택할 확률을 정의하는 함수임.
- 상태 시퀀스는 Markov Process이다.
- 주어진 policy 하에서 상태 시퀀스 는 Markov 과정 를 형성함.- 는 policy가 반영된 상태 전이 확률임.
- 상태와 보상 시퀀스는 Markov Reward Process이다.
- 상태 시퀀스와 보상 시퀀스 는 MRP 를 형성함.- policy가 있는 상태에서 보상과 상태의 전이 과정을 다룸.
- 정책에 따른 상태 전이 확률과 보상함수
- (정책 하의 상태 전이 확률):- 는 상태 s에서 행동 a를 선택했을 때 다음 상태가 s'로 전이될 확률임.
- 상태 s에서 가능한 모든 행동 a에 대한 가중합을 구하는 방식으로, 각 행동을 선택할 확률 와 그 행동으로 인해 상태 s'로 전이될 확률 를 곱한 값을 확산하는 방식.
- (정책 하의 보상함수) :
- 는 상태 s에서 행동 a를 선택했을 때 받는 보상임.
- 상태 s에서 가능한 모든 행동에 대해, 각 행동을 선택할 확률과 그 행동으로 인해 받을 보상을 곱한 값을 합산한 것임.
- vs state transition matrix
policy : 에이전트가 어떤 행동을 선택할지를 결정하는 규칙으로, 현재 상태에서 선택할 행동의 확률을 제공하며 에이전트가 학습을 하며 최적화할 수 있음.
state transition matrix : 선택된 행동 후에 환경이 어떻게 반응할 지를 설명. 현재 상태와 행동에 따른 다음 상태로의 전이 확률을 제공함. 환경에 의해 결정되는 것으로, 에이전트가 직접 제어할 수 없음. 걍 환경의 규칙같은 거임. 정해진 사실.
Value Function
- MDP의 state-value 함수 는 policy를 따라 state s에서 시작하면 기대되는 return 값임.
- action-value 함수 는 policy를 따라 state s에서 시작하여, action a를 했을때 기대되는 return 값임.
Bellman Expectation Equation
- state-value function은 즉각적 보상 + succesor state의 discount된 value로 쪼개질 수 있다.
- action-value function도 유사하게 쪼개진다.
- 는 특정 state에서의 예상 보상 값이다. 는 여기서 더 나아가, 특정 state에서 행동 a를 택했을 때의 예상 보상 값이다.
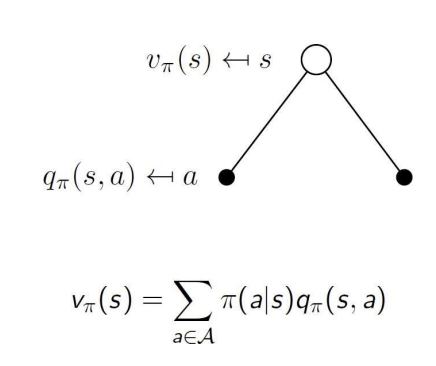
- state-value function 는 다음과 같이, 특정 state에서 행동 a를 선택할 확률 곱하기 특정 state에서 행동 a를 선택했을 때의 가치인 action-value function 로 표현할 수 있다.
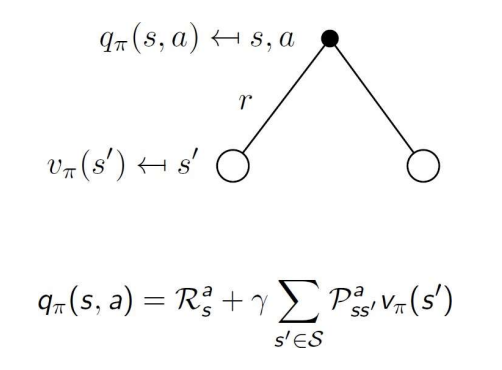
- 는 state s에서 행동 a를 했을 때의 예상 보상 값이다. 이 값은 그림에서와 같이 a를 행함으로써 보상 r과 전이되는 state s'에서의 value를 더한 값과 같다.
- action-value function 는 다음과 같이, a를 행함으로써 얻는 즉각적인 보상 와 s에서 a를 행함으로써 발생할 수 있는 s'의 확률과 s'에서의 value를 곱한 값인 에 discount value를 적용하여 표현할 수 있다.
- 는 다음과 같이 표현된다 :
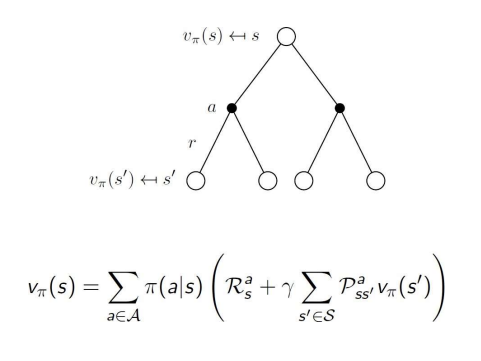
시그마
- state s에서 policy에 따라 행할 수 action의 확률
곱하기- s에서 a를 행할 때 발생하는 즉각적인 보상 + (s에서 a를 행함으로써 s'로 전이될 확률 곱하기 전이된 s'에서의 value)
악제발그만해
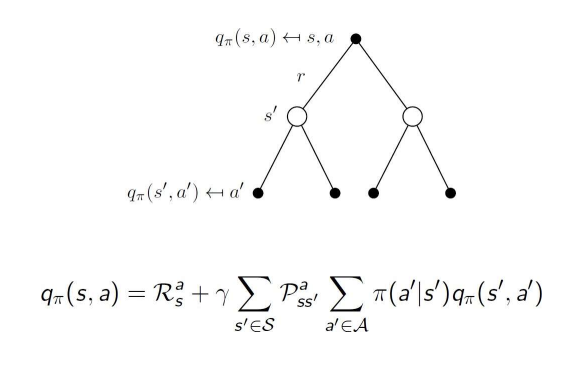
- 는 다음과 같이 표현된다 :
- s에서 a를 행할 때 발생하는 즉각적인 보상
더하기
discount value * 시그마- s에서 a를 행함으로써 s'로 전이될 확률
곱하기 시그마 - policy에 따라 s'에서 특정 행동 a'를 행할 확률
곱하기 - policy에 따라 s'에서 a'를 행할 때의 value
- s에서 a를 행함으로써 s'로 전이될 확률
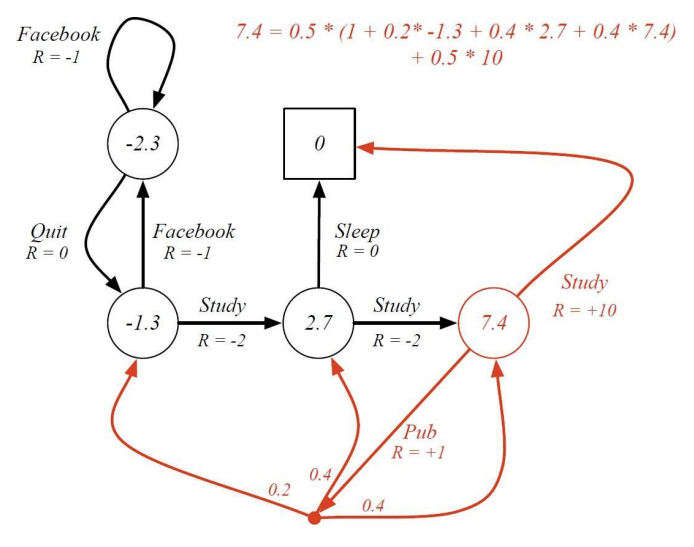
example
Bellman Expectation Equation in Matrix Form
- Bellman Expectation Equation은 matrix를 통해 표현할 수 있다.
여기까지의 쟁점!!
- 목표는 누적된 보상을 최대화시키는 것!
- optimal policy는 어떻게 찾는가?
- 어떤 policy가 더 좋은지 어떻게 결정하는가?
Optimal Value Function
-
optimal value function은 MDP의 환경에서, 모든 정책 중에서 가장 높은 기대 보상을 제공하는 가치 함수임.
-
MDP를 solve한다는 것은 optimal value function을 아는 것을 의미. optimal value function을 안다면 에이전트는 어떤 상태에서 어떤 행동을 해야 최대의 보상을 받을 수 있을지 알 수 있기 때문에 중요함.
-
optimal state-value function : 는 주어진 state s에서 에이전트가 받을 수 있는 최대의 기대 보상을 나타냄. 즉 모든 정책 중에서 최적의 정책을 사용했을 때의 기대 보상을 말함.
-
optimal action-value function : 는 state s에서 a를 행할 때 에이전트가 받을 수 있는 최대의 기대 보상을 나타냄. 즉, 모든 정책 중에서 최적의 정책을 사용했을 때의 기대 보상을 말함.
Optimal Policy
- 의 기대 보상이 보다 크거나 같을 때, 가 보다 더 좋거나 같은 수준의 정책이라고 할 수 있다.
- 모든 MDP에 대해서 다음과 같은 규칙들이 성립한다 :
- optimal policy 이 존재할 때, 이 policy는 다른 모든 policy들보다 좋거나 동일하다.- 모든 optimal policy들은 optimal value function을 얻는다. 즉, 모든 optimal policy는 가능한 가장 많은 value를 도출한다.
- 모든 optimal policy는 optimal action-value function을 얻는다. 즉, 모든 optimal policy는 최적의 action을 선택하여 가능한 가장 많은 value를 도출한다.
- 모든 optimal policy들은 optimal value function을 얻는다. 즉, 모든 optimal policy는 가능한 가장 많은 value를 도출한다.
Finding an Optimal Policy
- optimal policy는 를 최대화함으로써 찾을 수 있다.
- 모든 MDP에 대해 항상 deterministic optimal policy가 존재한다.(최선의 action 선택을 통한 최대의 value 창출)
- 우리가 , 가장 큰 값을 내는 action-value function을 안다면, 우리는 바로 optimal policy를 얻는 것
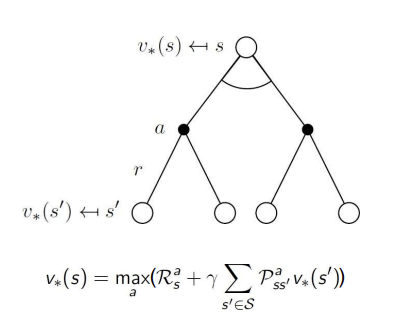
Bellman Optimality Equations for $$q_{*}
optimal value function은 Bellman optimality equation을 통해 재귀적으로 정의된다.
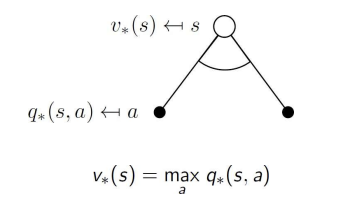
다음과 같이, v는 q에서 value가 max가 되는 행동을 고르는 것으로 정의된다.
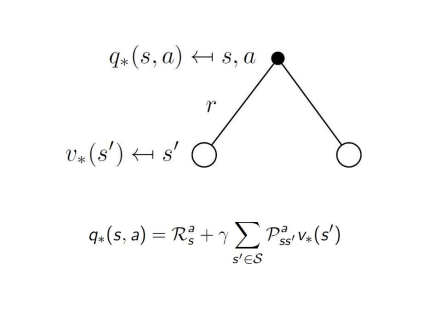
q는 행동을 선택했을 때 발생하는 즉각적인 reward와 시그마(a를 택함으로써 전이되는 s'의 확률*상태 s'에서의 최적의 value)로 정의할 수 있다.
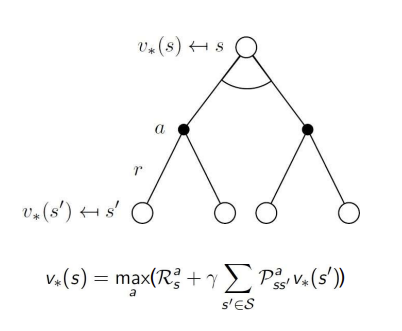
즉 처음의 v가 q로 정의되었던 것, 그리고 두번째의 q가 다시 v로 정의되는 것을 연결하면 다음과 같이 v로 정의된 q로 정의된다..
그리고... v가 다시 q로 정의되었듯이 q는 또 q로 정의된 v로 정의된다. ...
제발 그만해
Solving the Bellman Optimality Equation
- Bellman Optimality Equation은 비선형이다. 상태와 행동의 선택이 상호작용하며 단순한 선형 연산으로는 해결되지 않는다.
- 일반적으로 닫힌 해가 없다, 즉 방정식을 명시적으로 풀어서 간단한 수식으로 표현을 할 수 없는 경우가 많음. 때문에 반복적인 방법을 통해 점진적으로 해를 구하는 방식이 필요하다.
- iterative solution method : 반복적인 방법을 사용하여 해결. 대표적으로 policy iteration과 value iteration
Bellman Expectation Equation vs Bellman Optimality Equaition
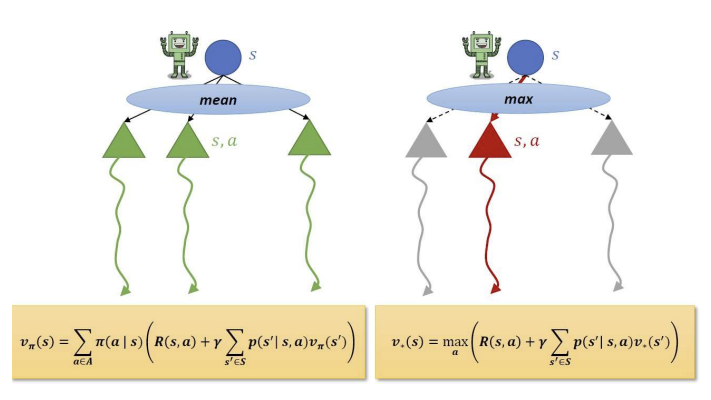
- Bellman Expectation Equation은 policy 하의 가치 함수를 계산하는 계산하는 방식으로, 기대값(mean)을 사용한다. 즉 주어진 상태에서 각 행동을 취할 확률에 기반하여 여러 행동의 평균을 취하는 방식이다.
--> 즉 얘는 그냥 state s의 기댓값 - Bellman Optimality Equaition은 최적 정책에 대한 최적 가치 함수를 계산하는 방식으로 최대값(max)를 사용한다. 즉 상태 s에서 가능한 행동들 중 가장 최적의 행동을 선택하여 최댓값을 취한다.
--> 즉 얘는 그냥 state s의 최댓값
