Limitation of Q-Learning using a Q-Table
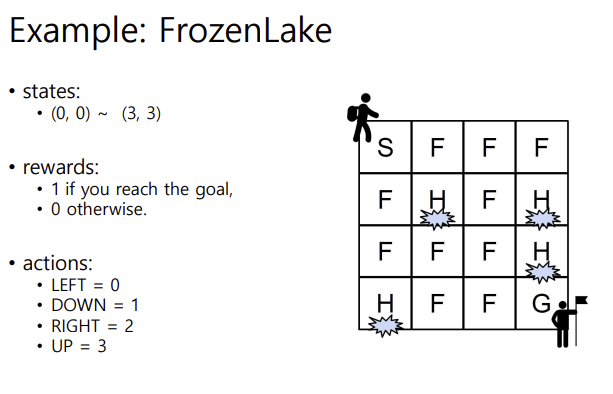
- small size map의 경우에는 Q 테이블을 정하는 것이 가능함. 예를 들어 이러한 프로즌레이크 문제에서는 Q 테이블이 4 곱하기 4 (그리드) * 4(행동) 으로, 64개의 저장공간이 필요함. 그런데 이것보다 더 커지면 어케됨???
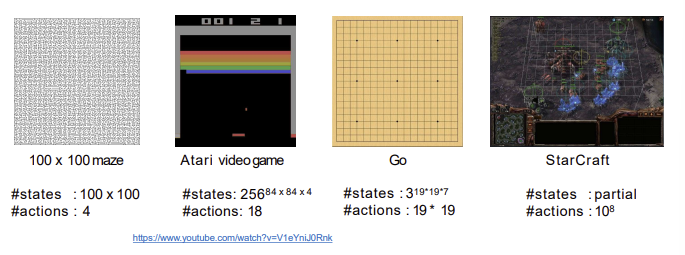
이렇게 열라 큰 문제들을 맞닥뜨리면 걍 주옥되는 거임 ㅠ 이걸 다 어케 저장할건데 노답임 그냥. Q 테이블 저장하는 방식으로는 진짜 답이 없음. 무언가 대책이 필요함
그럼 model free RL을 어떻게 확장해야할까?
Value Function Approximation
- 기존 가치 함수 표현 방식
지금까지는 가치 함수 V(s)나 action 가치 함수 Q(s,a)를 lookup table로 표현함. lookup 테이블 방식에서는 각 상태 s에 대한 값 V(s) 또는 action 행동 쌍 Q(s,a)를 테이블 형태로 저장함. - 큰 MDP에서의 문제점
- 상태와 행동의 수가 많아지면 모든 state-action 쌍에 대한 값을 저장하기가 어려워짐.- 메모리가 과도하게 소모되며 각 상태에 대해 개별적으로 학습하는 것이 너무 느리거나 비현실적일 수 있음. 예를 들어 자율 주행 차량과 같은 대규모 상태 공간을 가진 MDP에서는 이러한 테이블 기반 접근법이 비효율적임.
- solution : vlaue function approximation
- 이러한 문제를 해결하기 위해 가치 함수 근사를 사용함- 함수 근사에서는 테이블에 각 상태의 값을 저장하는 대신, 파라미터화된 함수(신경망이나 선형 모델 등)을 사용해 가치 함수를 근사함.
- ex) 상태 가치 함수 근사 :
- ex) 상태-행동 가치 함수 근사 :
- 여기서 w는 함수 근사에 필요한 파라미터 벡터로 학습을 통해 최적의 값을 찾아가는 과정임.
- 가치 함수 근사의 장점 :
- 메모리 절약 : 모든 상태나 상태-행동 쌍을 테이블에 저장하지 않고 파라미터화된 함수 하나만으로도 모든 상태에 대한 근사값을 계산할 수 있음.- 일반화 : 새로운 상태나 잘 알려져있지 않은 상태에 대해 빠르게 근사값을 계산할 수 있어 효율적임
- 대규모 문제 해결 가능 : 특히 대규모의 상태 공간을 다루는 문제에 대해 테이블 기반 접근보다 훨씬 효과적임.
쉽게 설명하자면, Value Function Approximation는 상태 s나 상태-행동 쌍 (s,a)를 인풋으로 하고 아웃풋이 그에 대한 value인 함수임. 이러한 함수가 만들어지면, 각 상태에 대해 가장 높은 가치를 가지는 행동을 선택하여 최적 정책을 구할 수 있을 것!
Benefits of Approximation
- 상태나 상태-행동 쌍에 대해 컴팩트하게 일반화하여 표현
- 메모리 절약- 계산 줄임
- explore에 필요한 경험 감소
Feature-Based Representations
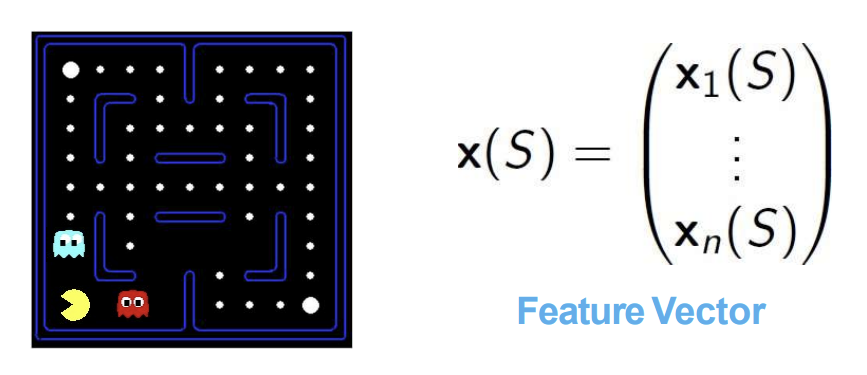
- 피쳐들의 벡터를 통해 state를 표현/묘사함
- 여기서 말하는 피쳐란, state의 중요한 특징을 표현하는 real number임- 팩맨에서는 이런 피쳐들이 있을 수 있음 :
- 가장 가까운 유령과의 거리
- 가장 가까운 점과의 거리
- 유령들의 수
- 등등등..
- 가장 가까운 유령과의 거리
- 팩맨에서는 이런 피쳐들이 있을 수 있음 :
Linear Value Functions
- 피쳐들의 선형적 결합으로 value function을 표현한 거임.
- 특성벡터와 가중치벡터의 내적으로 예측을 진행함. 각 피쳐가 가중치랑 곱해지는 것임! 그리고 그걸 더함
- 과 간의 mean-squared error를 최소화하는 벡터 w를 찾아야함.
여기서 기대값 E가 오차를 감싸는 이유는, 특정 상태에서만 오차를 최소화하는 것이 아니라 모든 상태에 걸쳐 평균적인 오차를 최소화하고자 하기 때문임. - 로컬 미니멈을 찾는 그래디언트 디센트
- 오차함수를 최소화하기 위해 사용. 파라미터 w를 조정하여 오차 함수를 최소화하는 것이 목표임- 기울기 는 오차 함수 J(w)에 대한 w의 변화율을 의미함. 기울기는 오차가 가장 빨리 증가하는 방향을 나타내므로, 기울기의 반대 방향으로 이동하여 오차를 줄여나감
- 그래서 가중치 업데이트는 이렇게 이루어짐 :
여기서 알파는 학습률로 업데이트되는 속도를 조절함. 이 값을 통해 오차 함수의 기울기 방향으로 조금씩 이동하면서 최적의 파라미터를 찾아냄 - 위의 기울기 표현을 풀어서 쓰면 그 아래의 식임. 해당 식은 오차와 근사된 가치함수의 기울기를 곱한 값의 기대값을 통해 파라미터를 업데이트함을 나타냄.
Gradient Descent
- J(w)는 파라미터 벡터 w에 대한 미분 가능한 함수로, 이 함수의 값을 최소화하는 w를 찾아내는 것이 목표임. 이 함수는 오차 함수일 수도 있고, 모델 성능을 평가하는 지표일 수도 있음.
- 목적은 J(w)를 최소화하는 파라미터 w를 찾는것. 이를 위해 기울기를 계산하여, 기울기의 반대 방향으로 이동함. 경사하강법은 이러한 과정을 반복하면서 점진적으로 최적값에 수렴함.
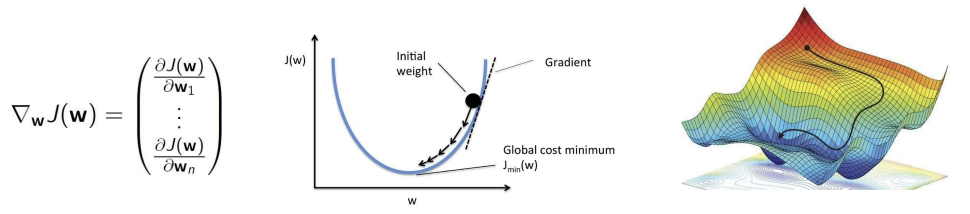
- 기울기 :
- 기울기는 함수 J(w)가 w의 각 구성요소에 대해 얼마나 빠르게 증가하거나 감소하는지를 나타내는 변화율 벡터임. 기울기의 정의는 다음과 같음 :
- 이 벡터는 각 파라미터 w_i에 대해 미분값을 가지며, 기울기의 방향이 곧 함수가 가장 빠르게 증가하는 방향이 됨.
- 경사하강법 과정:
- 초기 파라미터에서 시작하여 기울기의 반대 방향으로 파라미터를 업데이트 해나감.- 초기 weight에서 출발하여 gradient 방향으로 이동하고 최종적으로 글로벌 cost minimum 지점에 도달하게 됨
- 이렇게 기울기의 반대 방향으로 이동함으로써 오차를 최소화하는 최적의 파라미터 값을 찾을 수 있음.
Incremental Prediction Algorithms
-
실제 가치 함수 와 타겟 값:
- 이상적으로는 true 가치 함수 를 사용하여 학습하고 싶지만, 강화학습에서는 슈퍼바이저(감독자)가 없고, 오직 보상만 주어짐- 따라서 실제 가치 함수 대신, 타겟 값을 설정함.
- MC와 TD는 각각 다른 타겟 값을 사용함
-
MC 방법:
- MC에서는 에피소드가 끝난 후 누적 보상 G를 사용하여 상태의 가치를 추정함-
가중치 업데이트는 다음과 같이 이루어짐:
- G : 상태 s에서 시작하여 에피소드가 끝날 때까지 얻은 누적 보상
- 차이점(G-v_hat) : 실제 누적 보상과 예측된 가치의 차이
- 이 차이를 이용해 w를 조정하여 다음 번 가치 예측이 더 정확해지도록 함
- G : 상태 s에서 시작하여 에피소드가 끝날 때까지 얻은 누적 보상
-
-
TD 방법:
- TD에서는 에피소드가 끝날 때까지 기다리지 않고 매 단계마다 TD 타겟을 사용하여 상태의 가치를 추정함.- 가중치 업데이트는 다음과 같이 이루어짐:
- TD target : 현재 보상과 다음 상태의 가치를 할인율 감마로 조합하여 계산
- TD 차이 : 현재 가치 추정과 TD 타겟의 차이로, 이 값을 이용해 가중치를 업데이트함.
- 가중치 업데이트는 다음과 같이 이루어짐:
-
MC와 TD의 차이
- MC
- 전체 에피소드가 종료된 후 누적 보상 G를 사용하여 가중치를 업데이트함.
- 에피소드가 길 경우, 시간이 너무 소요함- TD
- 에피소드 중간에도 매 스텝마다 즉각적인 보상과 다음 상태의 가치를 사용하여 가중치를 업데이트함.
- 더 빠르게 업데이트 가능하며 에피소드 중간에도 중간에 학습이 가능함
- 에피소드 중간에도 매 스텝마다 즉각적인 보상과 다음 상태의 가치를 사용하여 가중치를 업데이트함.
- TD
Control with Value Function Approximation
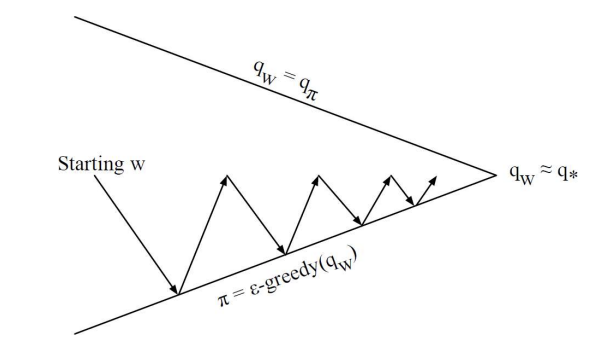
가치 함수 근사를 이용한 제어에 대해 설명하고 있음. 여기서 목표는 정책 평가와 정책 개선을 반복하며 정책에 수렴하는 것임
- 정책 평가
- 주어진 정책에 대해 상태 행동 가치 함수 를 근사하여, 현재 정책의 성능을 평가함.- 가치 함수 근사를 사용하여 를 직접적으로 추정하지 않고(action을 저장하는 방식 X) 파라미터화된 함수 ^를 통해 근사함. 이를 위해 파라미터 w를 업데이트함.
- 정책 개선
- 정책 평가 후, 현 정책에서 더 나은 행동을 선택하는 새로운 정책을 만듦- 여기서 앱실론 그리디 정책을 사용하여 exploration과 exploitation 사이의 균형을 유지하며 정책을 개선함. 이 과정을 통해 점진적으로 더 나은 정책을 찾으며 최적의 정책에 수렴함.
- 과정의 반복:
- 시작점에서 정책 평가와 정책 개선을 반복하면서 최적의 정책에 가까워지는 과정을 나타냄. 그림에서 볼 수 있듯, 시작점에서 시작해 반복적인 평가와 개선을 통해 최적의 상태-행동 가치 함수에 수렴하게 됨
Linear Action-Value Function Approximation
- 상태와 행동을 특성 벡터로 표현
- 상태 S와 행동 A의 조합을 특성 벡터 x(S,A)로 나타냄.- 이 특성 벡터는 상태와 행동을 설명하는 여러 특성 값들로 이루어져있으며 다음과 같은 형태를 지님 :
- 각 특성 x(S,A)는 상태와 행동의 특정한 특성을 나타내며, 학습을 통해 가치 함수에 영향을 미치는 요소로 작용함
- 이 특성 벡터는 상태와 행동을 설명하는 여러 특성 값들로 이루어져있으며 다음과 같은 형태를 지님 :
- 행동-가치 함수의 선형 결합 표현
- 상태와 행동의 특성 벡터 x(S,A)와 가중치 벡터 w의 내적을 통해 행동-가치 함수 ^q(S,A,w)를 근사함.- 이 선형 결합을 수식으로 나타내면 다음과 같음 :
- 내적 : 상태와 행동에 대한 가치의 추정값을 생성
- w : 각 특성에 대한 가중치로 학습을 통해 최적화됨
- 이 선형 결합을 수식으로 나타내면 다음과 같음 :
Action-Value Function Approximation
- 행동-가치 함수 근사:
- 목표는 상태 S와 행동 A에 대해 근사된 행동-가치 함수 ^q(S,A,w)를 학습하여 실제 정책의 행동 가치함수 $$q_{\pi}(S,A)에 가까워지도록 하는 것임.- 이를 달성하기 위해 가중치 벡터 w를 조정함
- 오차 함수 J(w)
- 이 오차 함수는 평균 제곱 오차(MSE)로 근사된 행동-가치 함수 ^q(S,A,w)와 실제 행동-가치 함수 의 차이를 최소화하는 방식으로 정의됨- 오차 함수는 다음과 같음 :
- 이 함수는 실제 값과 예측 값 간의 차이를 제곱하여 평균화한 값으로 오차를 최소화하는 방향으로 학습이 이루어지도록 함
- 오차 함수는 다음과 같음 :
- 확률적 경사 하강법(SGD):
- 오차 함수를 최소화하기 위해 기울기를 계산하여 가중치 w를 업데이트함- SGD의 업데이트 과정은 다음과 같음:
- 학습률 : 얼마나 크게 가중치를 업데이트할지 결정
- 오차 : 예측된 값과 실제 값 간의 차이로 오차가 클수록 가중치가 크게 조정됨
- 기울기 : 예측된 행동-가치 함수의 파라미터에 대한 변화율로, 오차를 최소화하는 방향으로 이동하게됨
Incremental Control Algorithms
MC, SARSA, Q-learning 세 가지 방법에서 목표 값을 정의하고 이를 통해 가중치 w를 업데이트하는 방식을 설명
- 기본 아이디어:
- 예측과 마찬가지로 제어에서도 실제 행동가치 함수 대신 사용할 목표값 target이 필요함.- 각 알고리즘은 서로 다른 방식의 목표값을 사용하여 가중치 업데이트를 수행함
- MC
- MC에서는 에피소드 종료 후 얻은 누적 보상 G를 목표값으로 사용함.- 가중치 업데이트는 다음과 같음:
- 여기서 G는 에피소드가 끝날 때까지 누적된 보상으로, 에피소드 단위로 업데이트가 이루어짐
- 가중치 업데이트는 다음과 같음:
- SARSA
- SARSA는 TD 타겟을 사용하여 가중치를 업데이트함- 이 방법은 현재 근사된 가치와 다음 상태의 실제 보상 R을 사용하여 매 단계마다 업데이트가 이루어짐
- 가중치 업데이트는 다음과 같음:
- 여기서 SARSA는 실제 다음 행동 a'에 따라 학습하는 on-policy 방법임
- Q-learning
- 큐러닝은 TD 타겟을 사용하여 가중치를 업데이트함- 현재 보상 R과 다음상태에서의 최대 행동 가치 값을 목표로 삼아, 매 단계마다 업데이트를 수행함.
- 가중치 업데이트는 다음과 같음:
- off policy 방법으로, 목표 정책은 탐욕적으로 학습하되 행동 정책은 다를 수 있음
Type of Value Function Approximation
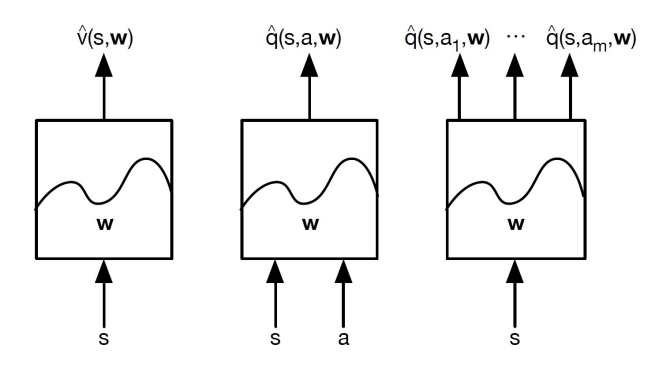
가치 함수 근사 유형을 설명하는 사진임. 각 블록은 상태 가치 함수와 행동 가치 함수를 파라미터 w로 표현하는 방식을 보여줌. 여기서 각 유형은 상태와 행동을 입력으로 받아, 특정 가치를 예측하는 함수로 구성됨.
1. 상태 가치 함수 근사 ^v(s,w)
- 입력 s는 상태만 포함되며 출력은 해당 상태의 가치 ^v(s,w)임
- 주어진 상태에 대해 단일 가치를 예측함
2. 상태-행동 가치 함수 근사 ^q(s,a,w)
- 입력 s와 a는 각각 상태와 행동이며 출력은 특정 상태에서 특정 행동을 선택할 때의 가치 ^q(s,a,w)이다.
- 이 함수는 상태와 행동의 쌍에 대해 해당 조합의 가치를 예상하여 정책을 학습하는 데 유용함
3. 다중 행동 가치 함수 근사 ^q(s,a1,w), ^q(s,a2,w), ..., ^q(s,am,w)
- 입력은 상태 s이며 출력은 각 행동에 대한 가치 함수 ^q(s,ai,w)임
- 특정 상태에서 모든 가능한 행동에 대해 각각의 가치를 계산하여 가장 좋은 행동을 선택하는 데 유리함.
