2023.10.07 주말 TIL👍
평일동안 ROS 관련 실습을 다하지 못해서 실습을 진행했다!
확실히 강의만 들었을 때보다 직접 코딩을 하는게 훨씬 이해가 잘 된다.
실습은 error와의 싸움이다...error의 원인을 찾고 해결하는데 시간이 매우 오래 걸린다ㅠ
다음주 자이카 실습 때 이것저것 실습해보기 위해 주말동안 ROS에 대해 많이 공부할거다!!🔥🔥
📝공부한 내용
- rviz 기반 3D 자동차 주행시키기
- ROS 토픽 실습 복습
😵어려웠던 점
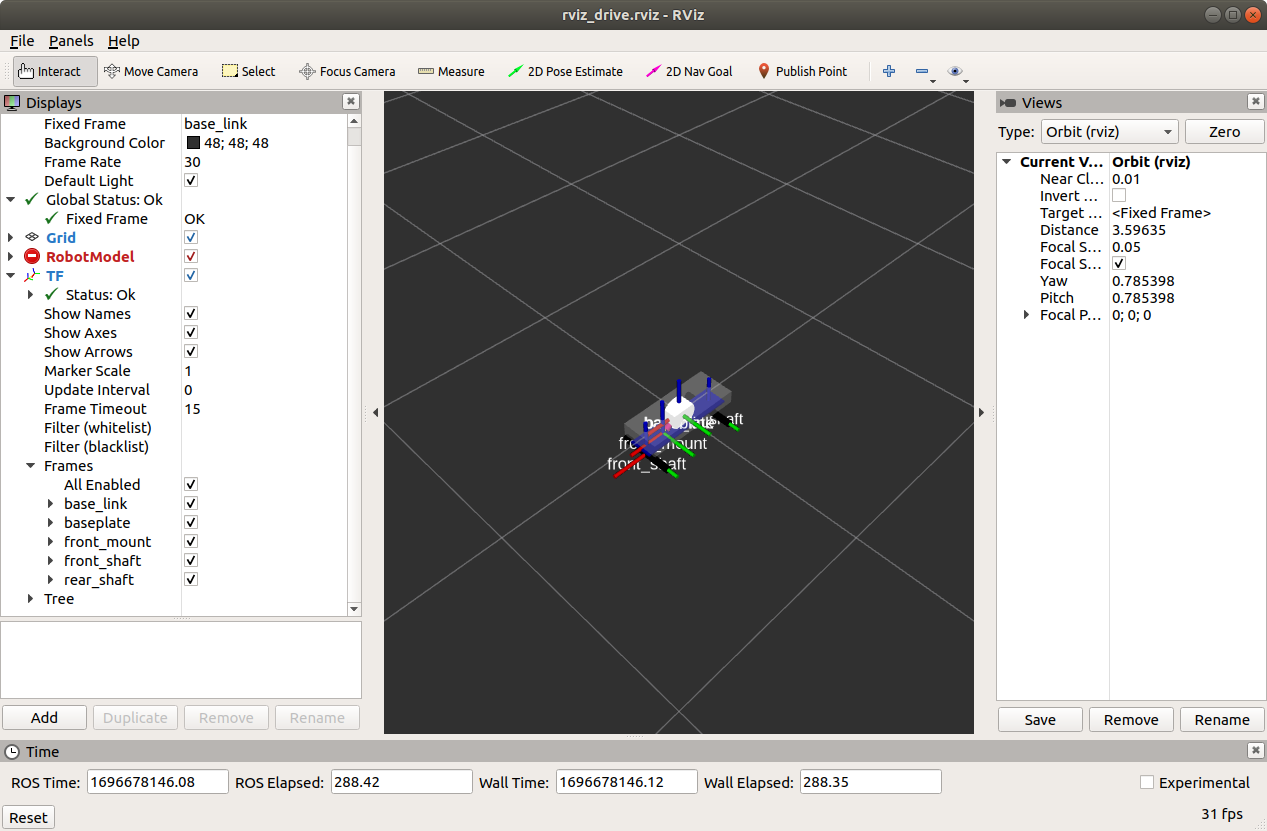
RVIZ : TF -> Frames
ROS의 RVIZ를 실행시키고 자동차의 바퀴를 작동하게 하는 실습을 진행했다. 그 과정에서 error가 발생하지는 않았지만 자동차의 바퀴가 보이지 않고, Frames 부분에 JointState의 name들이 보이지 않아서 바퀴가 굴러가는지 확인을 할 수 없었다....
결국 혼자서 해결하지 못하고 동료들에게 질문하여 해결할 수 있었다.
xycar_motor 토픽을 joint_states 토픽으로 변환하는 converter.py코드에서 joint_states 토픽의 header.stamp에 시간을 지정해주었더니 해결되었다! 하지만... 아직 왜 이 부분을 추가하면 해결되는지 이해를 못했다ㅠㅠ
추측을 해보자면...
header에 시간을 지정해주어야 그 시간에 따라 변하는 것을 확인할 수 있기 때문에 시간을 지정하지 않았을 때는 작동하는 것을 볼 수 없는 것이 아닐까...?
🧐부족한 내용
- 선속도, 각속도 계산 너무 어렵다ㅠㅠ 유투브 강의 보면서 추가로 공부해야겠다.
- odometry (euler와 quaternion 간의 변환)
