Real-time instance segmentation에서 좋은 성능- convolutional object detectors VS Vision transformer 계열
- 전자가 Real-time application에 적합하여, 많이 쓰이고 있음.
- convolutional object detectors VS Vision transformer 계열
- https://arxiv.org/pdf/2212.07784.pdf
Abstract
- YOLO 시리즈보다 real-time object detection 잘함
- instance segmentation 과 같은 tasks에 쉽게 확장 가능
- segmentation task는 detection task에 비해, output feature resolution이 너무 작으면 성능이 떨어집니다.
- architecture
- 아래의 구조 덕분에, backbone 과 neck에
호환 가능한 capacity를 가진 architecture를 제안(한 부분이 다른 부분의 성능이나 용량에 제한을 받지 않도록 고려된 구조)large-kernel depth-wise convolutions로 구성된basic building block(backbone과 neck모두 같은 basic building block을 씀)- depth-wise convolution 개념과 쓰는 이유: https://velog.io/@hsbc/depth-wise-separable-convolution
- 아래의 구조 덕분에, backbone 과 neck에
- soft labels 제안
- (dynamic label assignment 문제에서,) matching cost를 계산할 때 soft labels를 도입함으로써, 정확도를 높임
- 최고의
parameter-accuracy trade-off - real-time instance segmentation에서 SOTA!
그림
그림 1
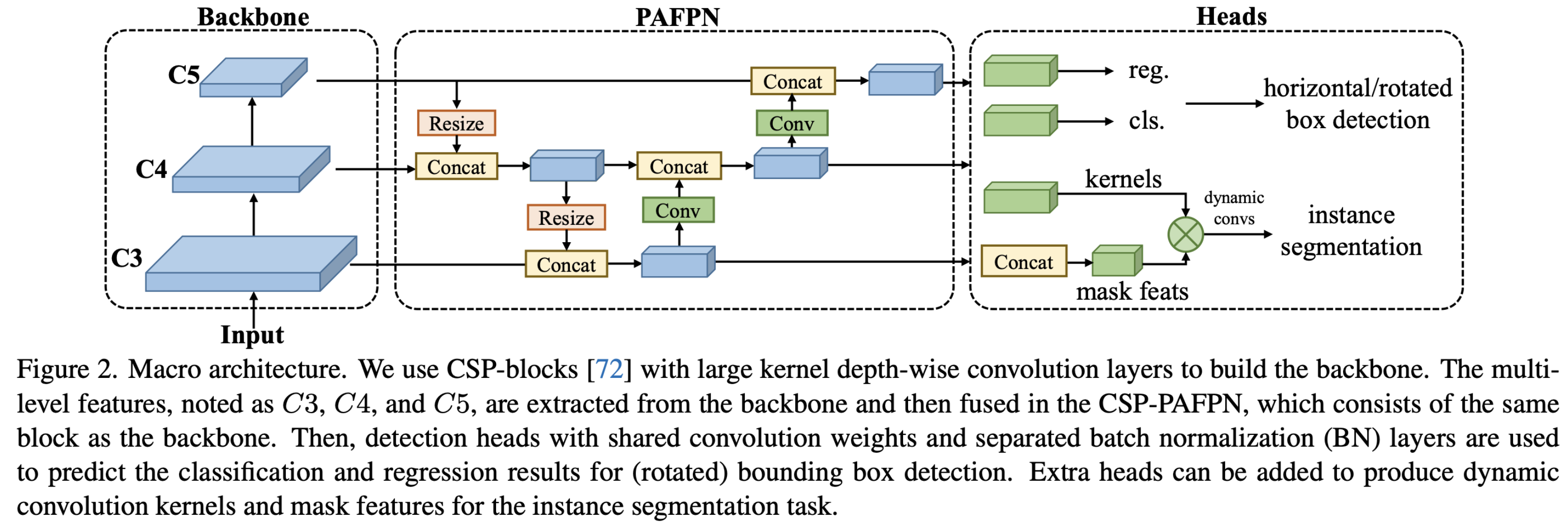
Backbone:
- CSP-block[72]를 사용
- https://velog.io/@hsbc/CSPCross-Stage-Partial-Net
- CSP block + large-kernel depth-wise convolution layers의 조합
PAFPN (Panoptic Feature Pyramid Network)
- backbone과 같은 block을 사용
- 이 네트워크는 다양한 크기의 객체를 탐지하기 위해 서로 다른 크기의 특징 맵을 결합합니다.
- encoder-decoder 깊이의 영향: https://velog.io/@hsbc/Encoderdecoder-깊이의-영향
Heads
- box regression / classification
- shared convolution weight and separated batch normalization layers
그림 2
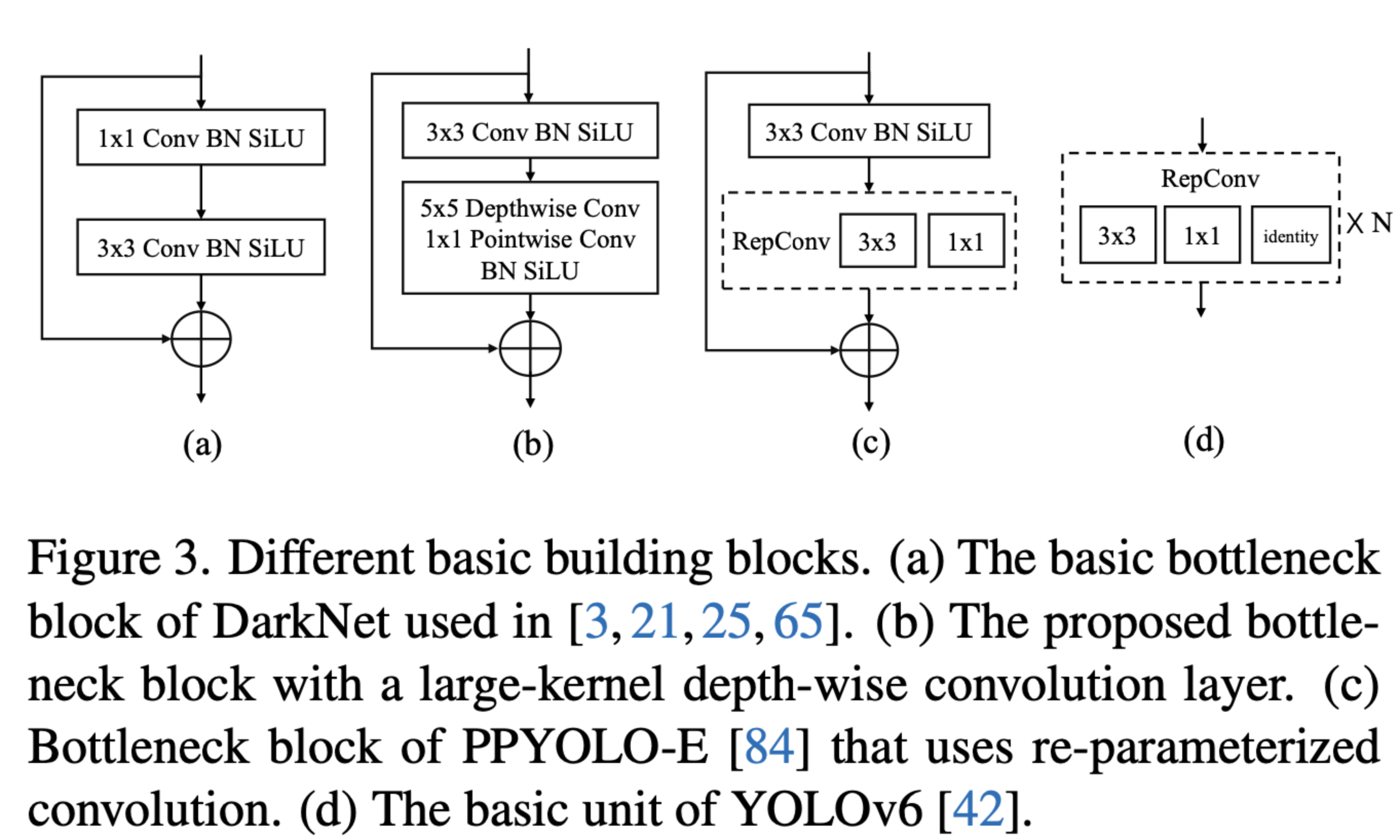
a
- a는 YOLO 계열에서 많이 쓰임
- 4 depth
b
- b가 논문에서 제안하는 것 =
a에서 inference speed 개선(계산량이 줄어듦)- b의 2번째 block을 depthwise separable convolution이라 부르기도 함
- https://velog.io/@hsbc/depth-wise-separable-convolution
- depthwise separable convolution 장점: weight 수가 적은데(메모리 적게 사용), 성능이 좋다.
- 하지만, weight 수를 줄이는 부작용으로 inference speed 측면(계산량)에서 단점이 생겨버림 (
1*1point-wise convolution이 추가되어서) -> 이를 해결하기 위해- depth를 3으로 줄임. but, depth를 줄이면서 생긴, 작은 물체(디테일)을 잡아내는 능력이 떨어지는 부작용을 해결하기 위해
- width of block(output channel 수)는 늘림.
- depth를 3으로 줄임. but, depth를 줄이면서 생긴, 작은 물체(디테일)을 잡아내는 능력이 떨어지는 부작용을 해결하기 위해
- b의 2번째 block을 depthwise separable convolution이라 부르기도 함
- 결론적으로는,
a와 성능은 같으면서도, inference speed를 빠르게 할 수 있었다.
c, d
- 어떤 최근 연구들은, re-parameterized convolution을 썼다. (장단점도 아래 글에 적혀있음)
그림 3
Method
3.2 Model architecture
Basic Building Block
- 과거에는 계산량을 줄이면서도 성능을 유지하기 위해 dilated convolution이나 Non-local neural networks 등을 이용했지만, 이것조차 real-time에 쓰기엔 부족하였다.
- 최근 연구들은, real-time 목적 달성을 위해, large-kernel depth-wise convolution을 쓰는게 트렌드다.
Balance of model width and depth
- 그림 2 참조.
Balance of backbone and network
- multi-scale feature 성능 향상을 위해 (물체 크기와 무관하게 성능을 높이기 위해)
- 과거에는
- larger backbone을 쓰거나, heavier neck을 썼는데
- 내 논문은
- neck의 basic block에 expansion ratio를 높임으로써 ->
computation-accuracy trade-off를 개선하였다.- Expansion ratio가 뭘까? : neck basic block의 output의 channel 수를 늘린다는 뜻인가?
- neck의 basic block에 expansion ratio를 높임으로써 ->
- 과거에는
Shared detection head
- parameter 개수를 줄이면서, 성능을 유지한 head!
- 과거의 real-time object detector head
- different feature scale 마다 seperate detection heads를 사용함.
- 우리는
- (TODO) multiple scale 마다 shared parameter head를 썼고,
- 그 대신, scale마다 다른 BN layer을 둠
- BN은 GN 과 같은 다른 normalization layer보다도 더 효율적인데, 그 이유는
- inference 시에, training 시 계산된 통계를 바로 사용할 수 있기 때문이다.
- normalization layer: https://velog.io/@hsbc/normalization-layers
- BN은 GN 과 같은 다른 normalization layer보다도 더 효율적인데, 그 이유는
- 과거의 real-time object detector head
3.3 Training Strategy
Label assignment and losses
- 1-stage detector VS 2-stage detector: https://velog.io/@hsbc/one-stage-detector-VS-two-stage-detector
- 2-stage는 localization먼저 하고 -> 해당 box의 이미지 classify를 진행한다.
- 하지만 1-stage는 localization과 classify를 동시에 진행
- 각 scale로부터의 dense predictions이 ground truth bounding box와 매칭되어야 함.
- 이떄 이용하는 것이
label assignment strategies[19, 47, 70] - https://velog.io/@hsbc/Label-Assignment-Strategy
- 최근 연구들은 dynamic label assignment strategies를 사용 [6, 20, 21]
- https://velog.io/@hsbc/dynamic-label-assignment
- 하지만: cost calculation에 문제가 있었다.
- [논문이 제안] dynamic soft label assignment strategy

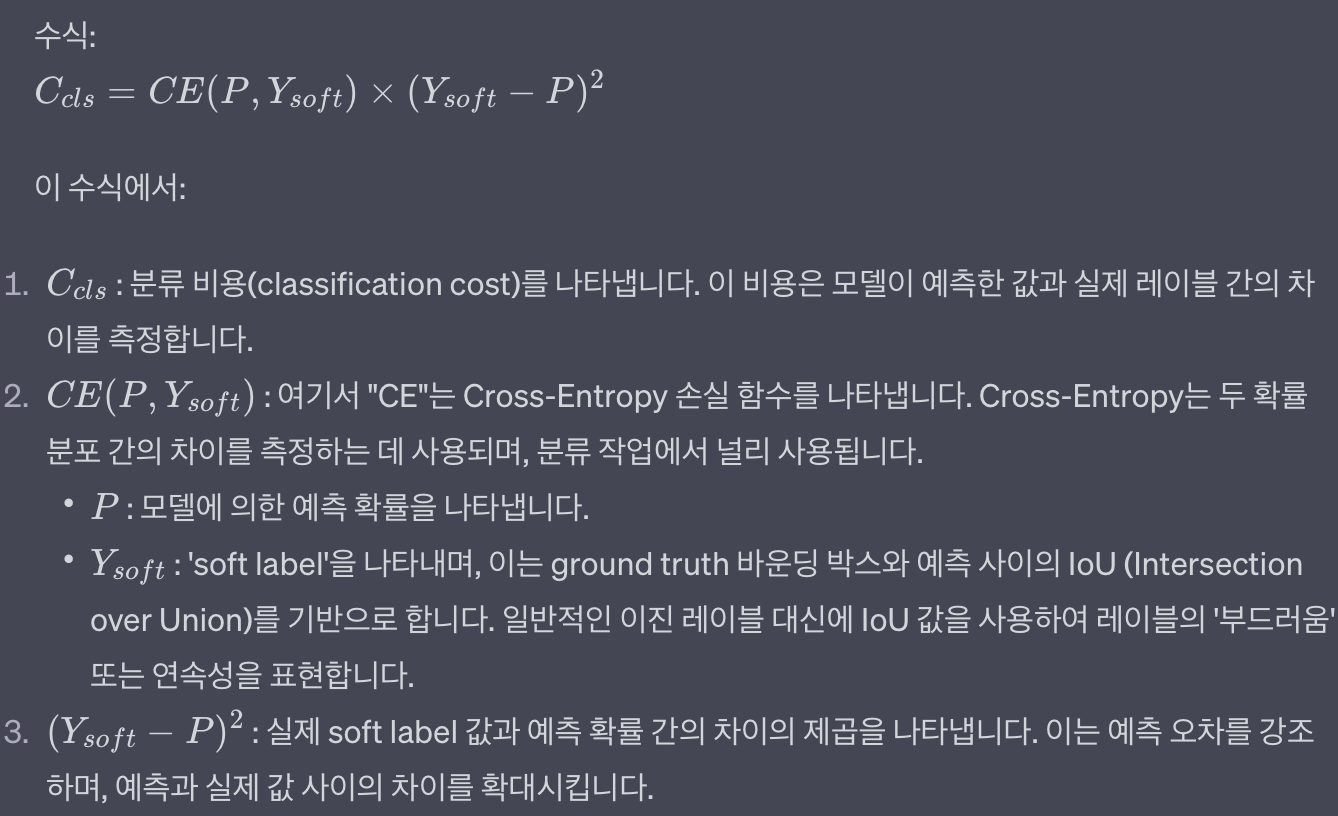
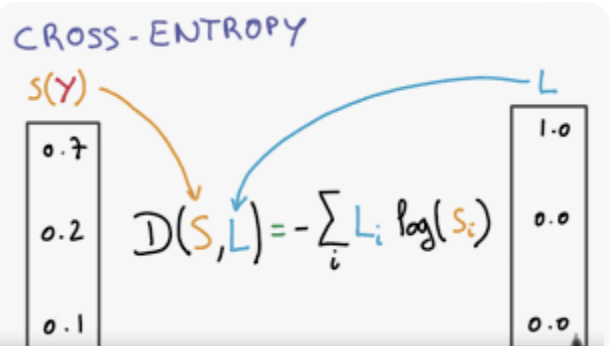
cls loss
- 과거 논문에서는 binary labels(매칭 됐냐 or 안 됐냐 기반)를 이용해서 cls loss를 계산함. 하지만 아래의 문제가 있었음.
- classification 성능과 bounding box regression 성능이 서로 방해를 함.
- 우리 cls loss는
(binary label로 인해,) noisy하고 unstable하게 학습되는 것을 막습니다. Y_soft: IoU =soft label- regression quality에 따라, classification loss를 reweight 합니다.
- IOU가 작으면, 고양이라고 추측할 확률을 좀 더 낮게 학습
- IOU가 크면, 고양이라고 추측할 확률을 좀 더 높게 학습
- IOU가 1이면, Y_soft는 1이 됨
Regression loss
- Generalized IOU[67] 대신, 아래를 사용
- GIOU의 단점: maximum difference between the best match and the worst match is less than 1
- 그 이유는, IOU가 틀렸을 떄, 더 큰 cost를 주기 위함

center loss
- soft center region cost
- α and β are hyper-parameters of the soft center re-
gion. We set α = 10, β = 3 by default.
Cached Mosaic and MixUp
- 최근 object detection area에서 널리 쓰이고 있는 cross-sample augmentation 방법론들: MixUp , CutMix
- 위 2가지 방법의 2가지 side effect
- each iteration 마다, training sample을 만들기 위해 multiple images를 load하는 것이 필요함.
- data loading cost가 들어. -> 그래서 학습을 느리게 함.
- 생성된 training sample이 noisy 해서, 실제 data distribution과 맞지 않을 수 있다.
- each iteration 마다, training sample을 만들기 위해 multiple images를 load하는 것이 필요함.
- 제안
- MixUp과 Mosaic을, caching mechanism 을 통해 개선함. (data loading cost를 줄임)
- training pipeline에서의 mixing image cost가 매우 감소함.
- cache operation:
cache length와popping method에 의해 제어- large cache length + random popping: 기존의 MixUP과 Mosaic과 비슷
- small cache length + FIFO popping: repeated augmentation과 비슷
- MixUp과 Mosaic을, caching mechanism 을 통해 개선함. (data loading cost를 줄임)
Two-stage training
YOLOX
- To reduce the side effects of ‘noisy’ samples by strong data augmentations, YOLOX [21] explored a
two-stage training strategy,- where the
first stageusesstrong data augmentations, includingMosaic, MixUp, and random rotation and shear, - and the
second stageuseweak data augmentations, such asrandom resizingandflipping. - As the strong augmentation in the initial training stage includes
random rotationandshearingthat cause misalignment between inputs and the transformed box annotations,- YOLOX adds the L1 loss to fine-tune the regression branch in the second stage.
To decouple the usage of data augmentation and loss functions,- we exclude these data augmentations and increase the number of mixed images to 8 in each training sample in the first training stage of 280 epochs to compensate for the strength of data augmentation.
- In the last 20 epochs, we switch to Large Scale Jittering (LSJ) [22],
- allowing for fine-tuning of the model in a domain that is more closely aligned with the real data distributions.
- To further stabilize the training, we adopt AdamW [55] as the optimizer,
- which is rarely used in convolutional object detectors but is a default for vision transformers [16].
- where the
3.4 Extending to other tasks
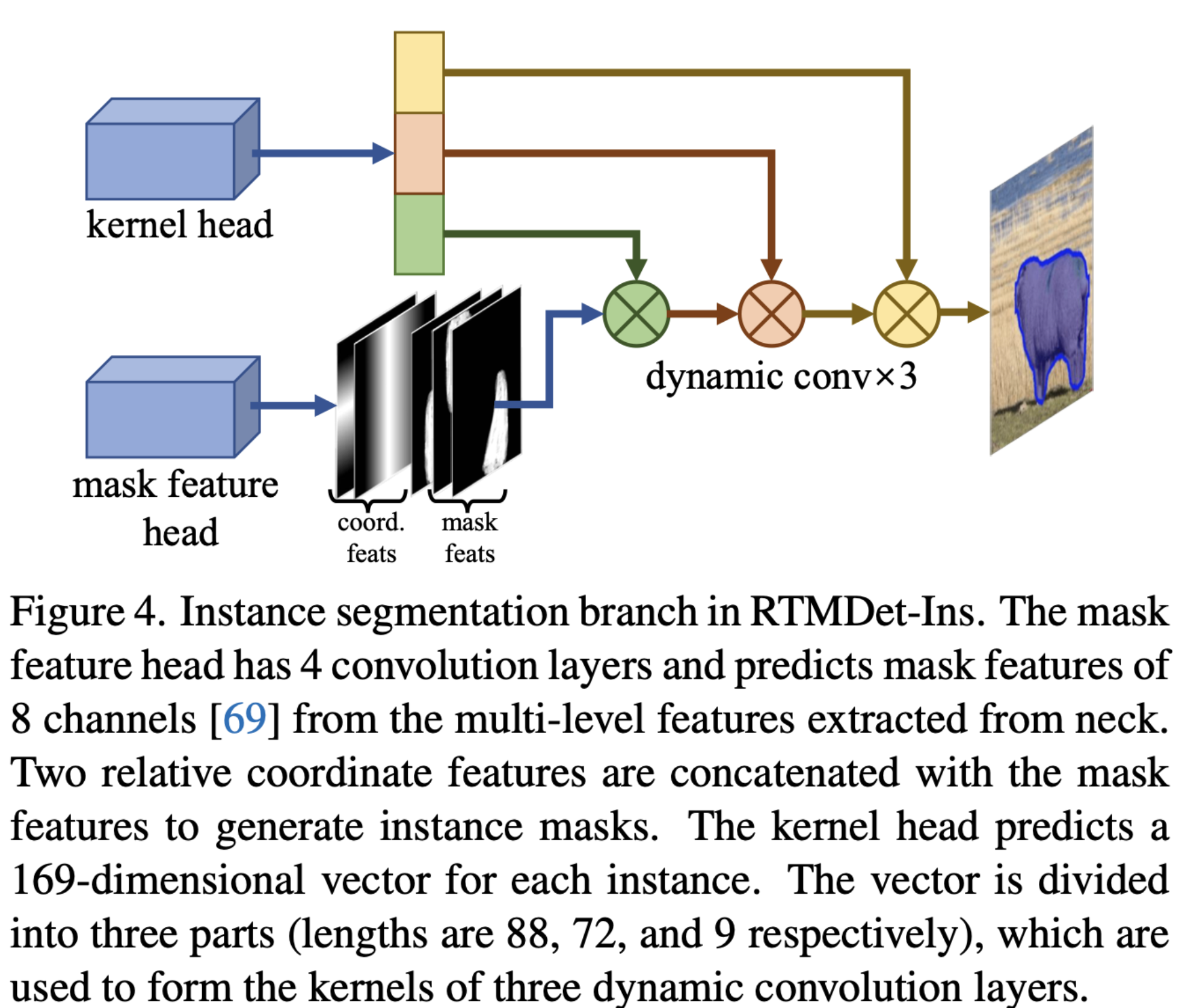
Instance segmentation
- The mask feature head
- 4 convolution layers
- extract mask features with 8 channels from
multi-level features.
- kernel prediction head
각 instance마다 169 차원 벡터를 예측- 169 차원 벡터는 three dynamic convolution kernels 로 분해
- mask features and coordinate features와 결합하여, instance segmentation masks 생성
- mask annotations에 내재된 사전 정보를 더 잘 이용하기 위해, 우리는
soft region prior in the dynamic label assignment를 계산 할 때- box center 대신,
mass center of the masks를 사용함.
- box center 대신,
- dice loss 사용: https://velog.io/@hsbc/dice-loss-사용

모든 의사 결정 과정을 지나칠 정도로 모두 기록하고, 나중에 스스로 피드백 하는 것
https://infiniteabundance.mn.co/members/35641220
https://infiniteabundance.mn.co/posts/90004462
https://infiniteabundance.mn.co/posts/90004531
https://visiontrainstation.mn.co/members/35641262
https://visiontrainstation.mn.co/posts/90004581
https://visiontrainstation.mn.co/posts/mind-blowing-unheard-facts-about-bamboo-floors
https://womenindata.mn.co/members/35641326
https://pathwaycitychurch.mn.co/members/35641360
https://pathwaycitychurch.mn.co/posts/90004764
https://pathwaycitychurch.mn.co/posts/90004776
https://aisalon.mn.co/members/35641436
https://www.palistrong.org/members/35641496
https://authortunities-hub.mn.co/members/35641539
https://authortunities-hub.mn.co/posts/eco-friendly-flooring-why-bamboo-is-a-sustainable-choice
https://authortunities-hub.mn.co/posts/bamboo-flooring-thailand-supplier